I2C and SMBUS bus master-slave mode is different from 4-wire SPI QSPI and Microwire data interface standards. This
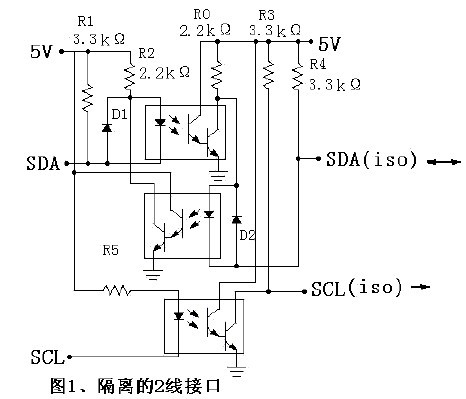
bus mode only needs 2 lines for data transmission and sends and receives data on the same line. Figure 1 can realize an isolated
2-wire interface. The isolated 5V power supply can be obtained from the main power supply through a small transformer and MAX253 transformer driver (not shown in Figure 1).
The transformer and optocoupler are selected according to the data rate and isolation voltage. Figure 1 uses 6N138. For supplier
information, please refer to the MAX253 and MAX845 manuals.
Assuming that the master end is uP or uC, the current injected into the SDA end determines the minimum conduction current of the optocoupler to be within 3mA.
Even so, the 300% current transfer ratio CTR of the optocoupler is sufficient to ensure the normal operation of the circuit. The slave end should use
devices compatible with I2C, such as the 8-bit D/A converter MAX517 or MAX127 data acquisition system.
When there is no signal transmission, the master end SDA and SCL are high, and the isolation end outputs SDA iso and SCL iso
are also high. The typical start state of I2C is that SDA jumps from high level to low level while SCL remains high. When SDA is
low, the current passes through R2 and the input end of the optocoupler, making the optocoupler output a typical value of about 0.4V. The optocoupler output plus the conduction voltage drop of the
Schottky diode D2, the pull-up resistors R1, R4 and R6 are used for compatibility with the I2C bus.
After the master end addresses in this way, the corresponding slave end responds with a low-level recognition bit. The bidirectional SDA allows data
bidirectional transmission. SCL only transmits data from the master end to the slave end. During the high level of SCL, the transition of SDA from low level to high level
generates a stop bit to terminate the data transmission.
Previous article:Driving signal generator circuit diagram
Next article:JESD204B serial interface clock requirements and implementation
Recommended ReadingLatest update time:2024-11-15 14:24

 Siemens Motion Control Technology and Engineering Applications (Tongxue, edited by Wu Xiaojun)
Siemens Motion Control Technology and Engineering Applications (Tongxue, edited by Wu Xiaojun) ESP32-S3 source code
ESP32-S3 source code




- High signal-to-noise ratio MEMS microphone drives artificial intelligence interaction
- Advantages of using a differential-to-single-ended RF amplifier in a transmit signal chain design
- ON Semiconductor CEO Appears at Munich Electronica Show and Launches Treo Platform
- ON Semiconductor Launches Industry-Leading Analog and Mixed-Signal Platform
- Analog Devices ADAQ7767-1 μModule DAQ Solution for Rapid Development of Precision Data Acquisition Systems Now Available at Mouser
- Domestic high-precision, high-speed ADC chips are on the rise
- Microcontrollers that combine Hi-Fi, intelligence and USB multi-channel features – ushering in a new era of digital audio
- Using capacitive PGA, Naxin Micro launches high-precision multi-channel 24/16-bit Δ-Σ ADC
- Fully Differential Amplifier Provides High Voltage, Low Noise Signals for Precision Data Acquisition Signal Chain






- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
- Sn-doped CuO nanostructure-based ethanol gas sensor for real-time drunk driving detection in vehicles
- Design considerations for automotive battery wiring harness
- Do you know all the various motors commonly used in automotive electronics?
- What are the functions of the Internet of Vehicles? What are the uses and benefits of the Internet of Vehicles?
- Power Inverter - A critical safety system for electric vehicles
- Analysis of the information security mechanism of AUTOSAR, the automotive embedded software framework
- Brief Analysis of Automotive Ethernet Test Content and Test Methods
- How haptic technology can enhance driving safety
- Let’s talk about the “Three Musketeers” of radar in autonomous driving
- Why software-defined vehicles transform cars from tools into living spaces
- Derivation of the Smith Chart Equation
- [RVB2601 Creative Application Development] Handheld Game Console (Bonus-01) Python Program to Convert Files into Arrays
- Blue line appears in vhdl bidirectional bus buffer simulation
- Different backlight structure types in monochrome LCD screens
- 3rd Anniversary
- Instrumentation Amplifiers: CMRR, You Stole My Precision
- Refuse to get something for free. The author of the open source project deleted the library and ran away. Thousands of applications output garbled characters endlessly.
- The physical meaning of FFT results
- MSP430 - Timer_A timer interrupt program
- Buck switching power supply MOS tube gate has pwm signal, but cannot conduct normally






 京公网安备 11010802033920号
京公网安备 11010802033920号