First of all, the rotor of Tesla's 3D6 motor adopts the classic single V permanent magnet structure, which uses a three-segment approach to optimize noise, with the middle segment being twice the size of the edge segment.
The BYD rotor introduced earlier uses a 6-segment V-shaped rotor (the thick one in the middle is actually 2 levels, it looks like only 5 segments, but it is actually 6 segments)
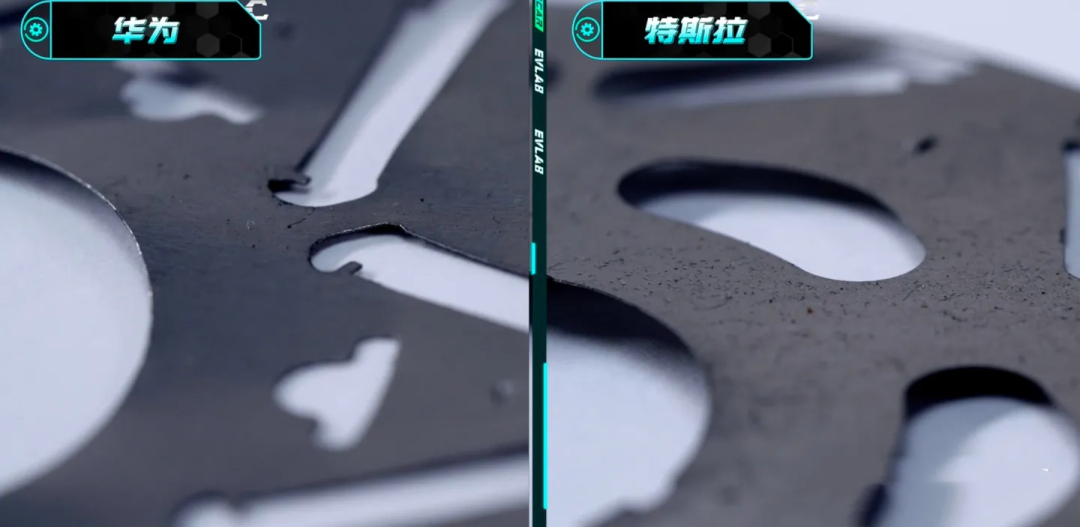
We have talked about this staggered pole design before, but the segmentation details, including the blades, are not as detailed as those of BYD and Huawei's rotors. The noise optimization auxiliary slots on the side of the previous generation Tesla motor rotor were very detailed, divided into high and low types, where the large auxiliary slots are placed on the surface magnetic bridge of the V-shaped magnetic steel slot, and the small auxiliary slots are placed near the pole center. This time, we did not find such a detailed high and low combination on the Tesla 3D6 rotor. It was simplified to a single radius silent slot. Combined with the equally simplified 3-segment design, Tesla's overall detail is not as good as those of the two companies.

Some people may not find it satisfying to just cut the stator with just light. It doesn’t matter. In this issue, in order to better demonstrate the technical details, Lao Wang came to the wire cutting machining center and we cut open the motor rotor shaft to take a look.
Before writing this article, Lao Wang saw in some consulting agency reports that the oil in the previous generation Tesla motor shaft first entered the center, was thrown to the inner wall by the protrusion, and then the cooling oil was sprayed out from four small holes to dissipate heat.

Schematic diagram of lubricating oil and heat flow in motor low-efficiency heating mode
After this cutting, it was found that Tesla returned to the same straight-through hollow structure as BYD and Huawei. After the oil enters the end ring, it can immediately be supplied to the oil-slinging holes on both sides of the rotor to cool the rotor. However, if you look closely, it is still not as detailed as BYD, because BYD's oil channel can flow through both sides of the permanent magnet, while most of Tesla's oil can only pass through the middle weight-reducing hole, which is not as direct as BYD. Huawei should be able to achieve the same heat dissipation capacity as BYD, but it's a pity that the oil channel is filled with glue. However, overall, all three can be regarded as motors that can cool the core of the rotor. It's still reasonable.
In addition, regarding the design change of Tesla's rotor oil channel, Lao Wang speculates that the initial protrusion of the shaft core should have taken into account the oil stirring resistance and controlled the injection flow, so the injection point of the cooling oil must start from the middle to ensure uniform heat dissipation. Now it is not necessary, and the oil flow rate is increased and can be directly pumped in from one side. Another basis to support this view is that in principle, the emergence of the 3D6 motor is to cooperate with Tesla's fourth-generation thermal management system, so Lao Wang speculates that the core design increases the flow of oil in the motor to enhance the motor's low-efficiency heating mode capabilities.
◇ The so-called inefficient heating mode is sometimes also called motor stall heating, and the heating efficiency is much higher than PTC. Tesla's previous design was relatively conservative in this regard. Judging from the fact that the shaft core design is closer to BYD and Huawei, Tesla should have solved the problem of stirring resistance after a large amount of oil is sprayed in the motor. BYD and Huawei both designed their own low-viscosity lubricants before they dared to design the flow rate in this way, and Tesla obviously also realized the benefits of this design. Of course, this is just a path of discussion, and the development of motors still affects a lot of mechanical structures.


Previous consulting reports have shown that the previous generation of Tesla motors used a protruding core design.

After we disassembled and cut it this time, we found that none of the three companies adopted the previous protruding oil-spraying design.
We can actually make a simple horizontal comparison of some of the core mechanical designs of the motors. In terms of permanent magnet arrangement and preparation, BYD and Tesla use a single piece of sintered NdFeB permanent magnet steel with a regular shape, while Huawei uses a block-style permanent magnet, but after our test in the second episode, it is still similar to an ordinary single piece of permanent magnet steel. In this regard, we think the three motors are not much different. Only Tesla does not have a double V-shaped permanent magnet arrangement.
In terms of lamination technology, BYD has the smallest thickness, and the other two are not much different. They all belong to relatively advanced processing technology. BYD has more fixed points on the side of the permanent magnet, while the other two have fewer. All three have obvious assembly buckle points, and the challenges of eddy current heating are not small. Huawei and BYD have 6 layers of segmented staggered pole layout, and Tesla has 3 layers. In this respect, Tesla is slightly simpler. The overall lamination process level of the three companies is not significantly different, and BYD is slightly better. In terms of the number of stator flat wire layers, Tesla has 10 layers, more than BYD. Tesla has an advantage under high power output, and BYD has a certain advantage in low-speed urban road conditions.
◇ Huawei DriveOne uses round wire motors and also emphasizes high power, but its overall efficiency is not as good as BYD and Tesla. Huawei lags behind slightly in this area. In terms of pole pairs, BYD uses 8 poles and 72 slots, while Huawei and Tesla both use 6 poles and 54 slots.

There are many evaluation dimensions for the number of pole pairs and coil slots. We will talk about them slowly in the future. This season, we will talk about a technical point, which is permanent magnet synchronous motors. Most of them are driven by sine wave AC, but in fact, the received sine wave cannot be an ideal sine wave, right? Because there is an air gap between the stator and rotor of the motor, the magnetic field is distorted, which interferes with the current and voltage input to the rotor. There are a lot of high-order harmonics that affect the operation of the motor, which is converted to noise and vibration for users.
When the rotor is stationary, it will always tend to stay in certain specific positions. Because the stator slot space is relatively limited, the magnetic circuit corresponding to the rotor pole and the stator slot always has an unbalanced magnetic resistance, and the magnetic lines of force will always pull the rotor to the position with the smallest magnetic resistance path regardless of how many there are. When the rotor rotates, the magnetic field fluctuations in the tooth slot area corresponding to the two ends of the permanent magnet will become larger. This feeling is similar to the feeling of repeatedly driving on speed bumps. This torque fluctuation is called tooth torque.

For this reason, people have agreed on some evaluation factors, which are the greatest common divisor of the number of stator slots and the number of poles, as well as the least common multiple. Because the number of slots and poles of the three motors are divisible, the evaluation factors are the number of stages of their own rotors and the number of slots, and the least common multiple is naturally the number of slots. BYD has 8 stages and 72 slots, while Tesla and Huawei have 6 stages and 54 slots, which is lower. The lower this value is, the higher the number of motor tooth harmonics, the greater the tooth slot fluctuation, and the more difficult it is to control noise and vibration.
However, according to the permanent magnet synchronous motor speed formula, this smaller number of pole pairs results in a relatively low iron loss coefficient, because in most speed ranges, the iron loss is positively correlated with the motor frequency.

The 6-pole Huawei Tesla's operating frequency of 16,000 rpm is estimated to be at the same level as the 8-pole BYD's frequency of around 12,000 rpm. This also further explains why BYD made the rotor punching so delicate, which is to optimize the iron loss as much as possible.

For 54-slot 6-pole motors like Tesla and Huawei, it is better to increase the current to push up the speed and torque in this situation, which is more acceptable from the user's perspective. Although BYD's motor control system is not easy to make, the 8-level 72-slot design is equivalent to more electrodes connected in parallel. It is relatively easier to increase the peak torque, and you don't have to use high current to achieve high power. In addition, the BYD reduction ratio we mentioned before is about 11, which can also be mutually supported. Overall, the performance indicators are all energy-saving and quiet.
◇ From the perspective of redundant design, the peak speeds of the three motors can be improved, but it may not be necessary, especially for BYD's 16,000 rpm with a reduction ratio of 10.8. Lao Wang believes that BYD should have considered higher universal properties and thus limited the peak speed. This is like when the blade battery was first launched, it seemed that there was still room for improvement in terms of energy, but after technological innovation and scale, top companies like Tesla will consider purchasing it. This is the charm of engineering philosophy.

On the other hand, Tesla is not afraid of the heat generated by large currents, because the rotor has core oil cooling and the stator has spray holes, so Tesla dares to use a reduction ratio of 9.3. Huawei cannot only look at the shortcomings of round wire motors. Huawei's advantage is that it has perfected the reliability of the inverter module while using modular thinking to penetrate into the demand level of the supply chain. To give an inappropriate example, BYD's motor is a bit like an 8-cylinder engine, with good smoothness and low noise, but the sports gear is slightly limited to save fuel. The pattern of Tesla or Huawei is a small displacement that is relatively easy to control, but sometimes you have to pay the price of energy consumption if you want to run fast.


Previous article:Analysis of upstream and downstream manufacturers of LiDAR
Next article:How to solve 3D object detection in autonomous driving!
- Popular Resources
- Popular amplifiers
 TC52N4849ECTRT
TC52N4849ECTRT




- Red Hat announces definitive agreement to acquire Neural Magic
- 5G network speed is faster than 4G, but the perception is poor! Wu Hequan: 6G standard formulation should focus on user needs
- SEMI report: Global silicon wafer shipments increased by 6% in the third quarter of 2024
- OpenAI calls for a "North American Artificial Intelligence Alliance" to compete with China
- OpenAI is rumored to be launching a new intelligent body that can automatically perform tasks for users
- Arm: Focusing on efficient computing platforms, we work together to build a sustainable future
- AMD to cut 4% of its workforce to gain a stronger position in artificial intelligence chips
- NEC receives new supercomputer orders: Intel CPU + AMD accelerator + Nvidia switch
- RW61X: Wi-Fi 6 tri-band device in a secure i.MX RT MCU
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
- CGD and Qorvo to jointly revolutionize motor control solutions
- CGD and Qorvo to jointly revolutionize motor control solutions
- Keysight Technologies FieldFox handheld analyzer with VDI spread spectrum module to achieve millimeter wave analysis function
- Infineon's PASCO2V15 XENSIV PAS CO2 5V Sensor Now Available at Mouser for Accurate CO2 Level Measurement
- Advanced gameplay, Harting takes your PCB board connection to a new level!
- Advanced gameplay, Harting takes your PCB board connection to a new level!
- A new chapter in Great Wall Motors R&D: solid-state battery technology leads the future
- Naxin Micro provides full-scenario GaN driver IC solutions
- Interpreting Huawei’s new solid-state battery patent, will it challenge CATL in 2030?
- Are pure electric/plug-in hybrid vehicles going crazy? A Chinese company has launched the world's first -40℃ dischargeable hybrid battery that is not afraid of cold
- SAM-L10-L11 series Questions and Answers
- LC filter design issues in DCDC step-down circuits
- EEWORLD University Hall----RMB settlement, VAT invoice issuance and various payment methods
- [CB5654 Intelligent Voice Development Board Review] Comparison of Voice Recognition Development Boards
- C2000 Delfino MCU F28379D LaunchPad Development Kit
- [HPM-DIY] HPM SDK updated to 0.13 SD card reading and writing performance greatly improved
- Radio communication equipment manufacturing
- How to learn hardware circuits well
- The difference between grounding and not grounding the input end of the differential amplifier circuit
- FAQ_Huawei smartphones cannot search for BLE devices based on Bluencg-132






 京公网安备 11010802033920号
京公网安备 11010802033920号