When it comes to new energy electric drive systems, people are more concerned about high-voltage drive motors. In fact, in addition to these "big motors", there are many "small motors". For example, the parking motor in the parking system mentioned earlier.
These "small motors" are increasingly using brushless DC motors, or BLDC motors. The counterpart of brushless DC motors is brushed DC motors. Here, the "brush" generally refers to carbon brushes.
Whether it is a brushless DC motor or a brushed DC motor, it is a permanent magnet synchronous motor: the rotor magnetic field is generated by a fixed permanent magnet, and the stator magnetic field is generated by current excitation.
Let's review the working principle of the permanent magnet synchronous motor, which can be simply described by the following figure. At this time, the middle magnet is subjected to a clockwise torque under the action of the magnetic field. If the polarity of the middle magnet remains unchanged, the middle magnet will eventually be in a horizontal state. In this case, the motor cannot achieve 360° rotation.

To solve this problem, the polarity of the middle magnet needs to be switched, which is called commutation, as shown in the figure below.

In a brushed motor, commutation is achieved by carbon brushes, which is why it is called a brushed motor. The commutation of a brushless DC motor is achieved by a controller that drives the large motor.

The working principle of brushless DC motor and brushed DC motor is basically the same. The only difference is that brushless DC motor needs a more complex controller to convert DC power into three-phase AC power (no carbon brushes for commutation), while brushed DC motor is easily controlled by DC voltage (carbon brushes for commutation).
You may be confused at this point. Since they are both permanent magnet synchronous motors, why are small motors called "BLDC" and drive motors usually called "PMSM"? This distinction is a bit strange, but I don't know why it's strange. This question is indeed very unfriendly to motor learners and is very easy to cause confusion.
Structurally, small brushless DC motors and large permanent magnet synchronous motors are the same, both have motor controllers, motor rotors, motor stators, bearings and accessories.
In terms of energy input, small brushless DC motors and large permanent magnet synchronous motors are the same, both converting DC to AC.
I won't keep you in suspense. The parameter that really distinguishes the two is "back EMF". We often say that the motor back EMF is one of the most important parameters in motor design because back EMF is the motor's ID card. When the motor design is frozen, its back EMF is also determined. The waveform and size of the back EMF can easily distinguish the type and size of the motor.

The BLDC back EMF waveform is trapezoidal, while the PMSM back EMF waveform is sinusoidal. Therefore, although they are both permanent magnet synchronous motors, they still need to be named to distinguish them, thus the commonly mentioned BLDC and PMSM appeared.
At the heart of scientific research lies philosophy. There will certainly be curious readers who will ask, why are their back-electromotive force waveforms different when their structures are so similar?
According to the definition on Wikipedia, back electromotive force refers to the electromotive force that has the tendency to oppose the passage of current, which is essentially an induced electromotive force. When the motor rotates, an induced electromotive force will also be generated in the coil. This induced electromotive force has the effect of weakening the electromotive force of the power supply. This induced electromotive force is the back electromotive force. Its function is to hinder the rotation of the coil. If the coil is to maintain its original rotation, the power supply must provide energy to the motor, thereby realizing the conversion of electrical energy into other forms of energy.
From the definition of back EMF, we can see that back EMF actually reflects the parameters of the entire motor magnetic field distribution. In other words, the electromagnetic design in the motor design determines the back EMF. To be more specific, the design of the stator coil winding (generating the stator magnetic field) and the rotor magnetic steel distribution design (generating the rotor magnetic field) determine the back EMF. The biggest difference is the former, the stator winding design.
Regarding stator winding design, this issue can be explained in a separate issue and will not be expanded in this issue. If you have been exposed to BLDC and PMSM, you will definitely find the difference in the stator winding design of these two motors.
BLDC usually uses concentrated winding, which is applied to salient pole stators. It is usually wound into a rectangular coil, wrapped with warp tape to shape it, and then embedded in the iron core of the convex pole after varnish dipping and drying.
PMSM usually uses distributed winding. The stator of the motor with distributed winding does not have convex pole palms. Each magnetic pole is composed of one or several coils embedded and wired according to a certain rule to form a coil group, which forms magnetic poles of different polarities after power is applied.
Due to the different back EMF waveforms, the control algorithms of BLDC and PMSM are also different.
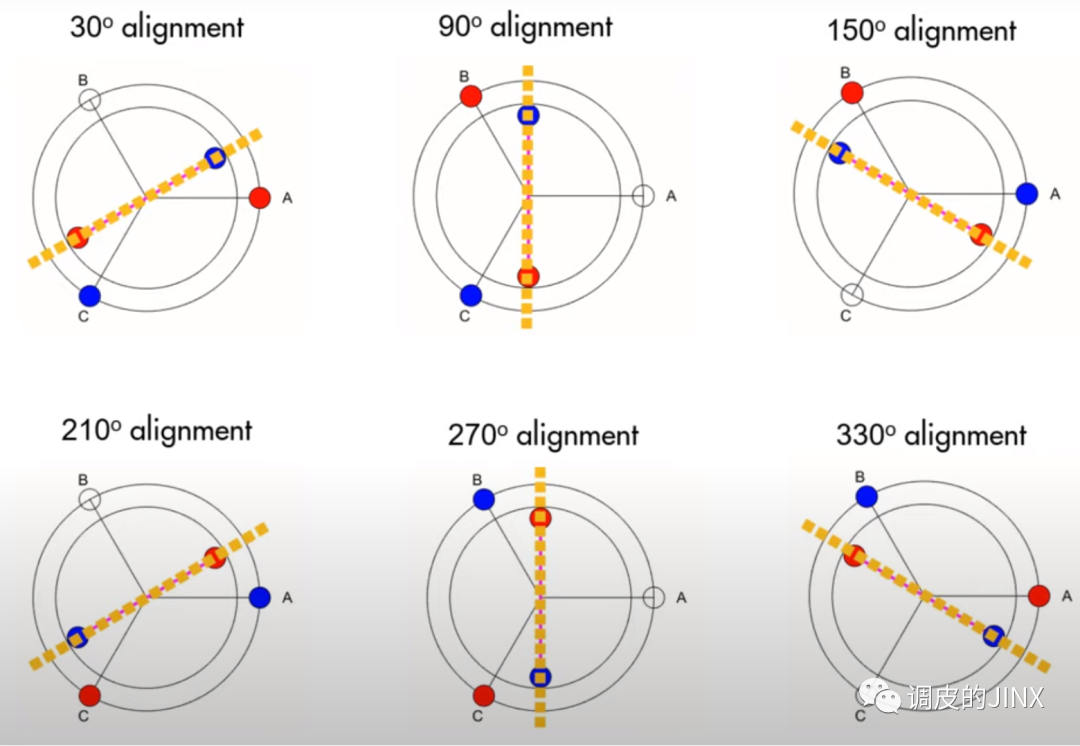
For a three-phase motor with a 120° interval, there are 6 ways to energize it: AB/AC/BA/BC/CA/CB. Take the following figure as an example, the 6 ways to energize it divide the circumference into 6 equal parts. This means that if we can correctly change the phase every 60°, the motor can rotate smoothly. This is the so-called BLDC 6-step control or trapezoidal control.
The more pole pairs, the more frequent the commutation.

In the previous article, I have compiled the most easy-to-understand explanation of motor control (Part 1), we talked about how PMSM motor control is to ensure that the stator magnetic field and the rotor magnetic field of the motor are always 90 degrees to obtain the maximum torque, so we adopted FOC (Field-Oriented Control) control.
Compared with the FOC control of PMSM, in the trapezoidal control of BLDC, the angle between the stator magnetic field and the rotor magnetic field never reaches 90°, and the angle fluctuates within a certain range (within 60°). On the one hand, this control cannot achieve the maximum torque, and on the other hand, there will be fluctuations in speed and torque. This control is economical and simple, and is more suitable for small motors, which is why large motor PMSM requires a more complex and reliable FOC control.

Previous article:Verify chip designs and reduce time to market with EMI scans
Next article:Car manufacturers secretly sell driving data of car owners, US senators ask FTC to investigate
Recommended ReadingLatest update time:2024-11-14 16:25

 PMSM port simulation algorithm to achieve ripple current reduction_Li Yiting
PMSM port simulation algorithm to achieve ripple current reduction_Li Yiting In-depth understanding of brushless DC motor (BLDC) principles and control
In-depth understanding of brushless DC motor (BLDC) principles and control STM32 permanent magnet synchronous motor (PMSM) FOC software development training
STM32 permanent magnet synchronous motor (PMSM) FOC software development training matlab and motor control
matlab and motor control Introduction to CC2650MODA Bluetooth® low energy RF module
Introduction to CC2650MODA Bluetooth® low energy RF module PI Online Seminar - Brushless DC Motor (BLDC) Driving and Control Methods
PI Online Seminar - Brushless DC Motor (BLDC) Driving and Control Methods





- Red Hat announces definitive agreement to acquire Neural Magic
- 5G network speed is faster than 4G, but the perception is poor! Wu Hequan: 6G standard formulation should focus on user needs
- SEMI report: Global silicon wafer shipments increased by 6% in the third quarter of 2024
- OpenAI calls for a "North American Artificial Intelligence Alliance" to compete with China
- OpenAI is rumored to be launching a new intelligent body that can automatically perform tasks for users
- Arm: Focusing on efficient computing platforms, we work together to build a sustainable future
- AMD to cut 4% of its workforce to gain a stronger position in artificial intelligence chips
- NEC receives new supercomputer orders: Intel CPU + AMD accelerator + Nvidia switch
- RW61X: Wi-Fi 6 tri-band device in a secure i.MX RT MCU
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
- Red Hat announces definitive agreement to acquire Neural Magic
- 5G network speed is faster than 4G, but the perception is poor! Wu Hequan: 6G standard formulation should focus on user needs
- SEMI report: Global silicon wafer shipments increased by 6% in the third quarter of 2024
- OpenAI calls for a "North American Artificial Intelligence Alliance" to compete with China
- OpenAI is rumored to be launching a new intelligent body that can automatically perform tasks for users
- Nidec Intelligent Motion is the first to launch an electric clutch ECU for two-wheeled vehicles
- Nidec Intelligent Motion is the first to launch an electric clutch ECU for two-wheeled vehicles
- ASML provides update on market opportunities at 2024 Investor Day
- Arm: Focusing on efficient computing platforms, we work together to build a sustainable future
- AMD to cut 4% of its workforce to gain a stronger position in artificial intelligence chips
- [RISC-V MCU CH32V103 Review] Hardware IIC drive OLED (finally)
- 2 mistakes in the RSL10 official getting started guide
- ADC10 multi-channel input of msp430g2553
- 【TI Recommended Course】#Texas Instruments Field Transmitter Output Interface/Fieldbus Solution#
- 【CH579M-R1】+Love for CH579M
- Module Design and FPGA Verification of 64-bit MIPS Microprocessor
- MSP430 MCU Example 10-8-bit Digital Tube Display Clock
- Getting Started with the ST SensorTile.box Sensor Kit (4) Programming Mode Experience
- How to choose the right AFE for BMS
- EEWORLD University Hall----Motor and Drag (Motor Part) Harbin Institute of Technology






 京公网安备 11010802033920号
京公网安备 11010802033920号