1 Introduction
DC servo drives are widely used in the fields of industry, medical treatment, and national defense due to their excellent driving performance. The structure of a typical DC servo drive is shown in Figure 1-1. The entire system is a multi-loop control system consisting of a current loop, a speed loop, and a position loop. Traditional servo drives use analog circuits with op amps as the core, which have the disadvantages of complex structure, difficulty in parameter adjustment, and system performance being easily affected by the environment. With the rapid development of microprocessor technology, analog digital interface technology, and power semiconductor technology, modern DC servo drives generally use digital control systems with microprocessors as the core. Servo drives with microprocessors as the core can not only easily implement control algorithms that could not be implemented with analog circuits before, but also have the advantages of simple structure, convenient parameter adjustment, and system performance being insensitive to environmental parameters. At the same time, digital control systems can also make full use of mature network connection technology to achieve multi-machine parallel operation.
1-1
2. Introduction to Chip Features
SPMC752313A is a new member of μ'nSP™ series products, and is a 16-bit microcontroller specially designed for motor drive launched by Sunplus Technology. It has excellent timer and PWM signal generator. It can easily realize various motor servo drive solutions.
SPMC75F2313A has an operating speed range of 0~24MHz within the operating voltage range of 4.5V~5.5V, and has 2K words of SRAM and 32K words of flash ROM; up to 33 programmable multi-function I/O ports; 4 general-purpose 16-bit timers/counters (including a motor drive dedicated PWM waveform generator and a position detection interface timer), and each timer has a PWM event capture function; 2 dedicated timing programmable cycle timers; programmable watchdog; low voltage reset/monitoring function; 8-channel 10-bit analog-to-digital conversion. With the support of these hardware peripherals, SPMC75F2313A has a very good performance in the field of motor control. The characteristics of SPMC75F2313A are as follows:
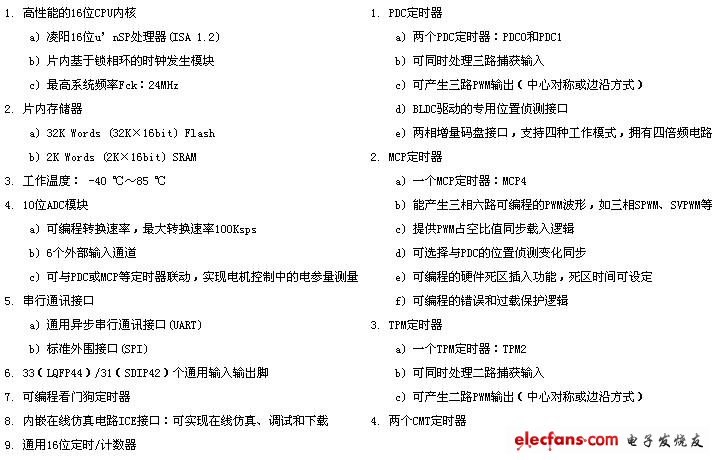
Click to see the original image
3. Introduction to the overall system solution
This servo driver is mainly composed of Lingyang SPMC75F2313A, a power full bridge composed of IRF540 and various interface modules. Its structural block diagram is shown in Figure 3-1. The driver uses a position servo structure with a current loop, in which the position servo loop can be connected to the system as needed. The driver uses a 20KHz bipolar PWM to ensure good dynamic performance of the system.
3-1
5-1
The flow of the core service subroutines of each control loop is shown in Figure 5-2. These parts are the core of the entire system, and their performance also determines the performance of the entire drive. Therefore, these parts are written in pure assembly, and the corresponding PID algorithms are also adjusted in structure and optimized in performance according to the characteristics of different control loops. This ensures the performance and real-time performance of these parts of the program to the maximum extent.
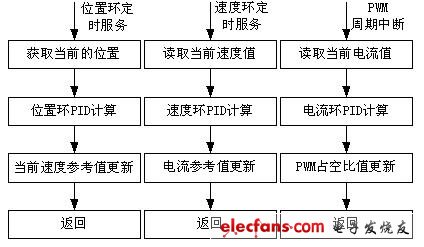
Figure 5-2 PWM period interrupt service subroutine flow chart
The system control part is the heart of the whole system coordination. The whole system works in an orderly manner under its coordination. This part mainly gives corresponding control information according to the system settings and the current system status to ensure the reliable operation of the system.
The human-machine interface program mainly provides users with a simple and easy-to-use interactive interface to facilitate users to reliably control the drive. The start and stop of the drive and the setting of various operating parameters are all carried out at this level.
6 Conclusion
Usually, in the process of developing servo drive equipment, it is necessary to write real-time and highly readable code, and then hybrid programming is needed. However, Sunplus' m'nSP™ IDE has a good programming environment, which can easily and easily perform hybrid programming (calling the assembler in the C program and calling the C program in the assembler).
The system uses three timers and about 30 IO port resources of SPMC75F2313A. In fact, the resources of SPMC75F2313A are quite rich. Because it has professional motor drive hardware support, the development of motor drive system becomes relatively simple. Therefore, the motor servo drive system based on SPMC75F2313A has broad application prospects in the fields of industry, medical treatment, national defense, etc.
Previous article:Interface and programming method between LCD and single chip microcomputer
Next article:Solution to Eliminating Electromagnetic Interference of MCU System
Recommended ReadingLatest update time:2024-11-16 21:33

- Popular Resources
- Popular amplifiers
 Wireless Sensor Network Technology and Applications (Edited by Mou Si, Yin Hong, and Su Xing)
Wireless Sensor Network Technology and Applications (Edited by Mou Si, Yin Hong, and Su Xing)




- High signal-to-noise ratio MEMS microphone drives artificial intelligence interaction
- Advantages of using a differential-to-single-ended RF amplifier in a transmit signal chain design
- ON Semiconductor CEO Appears at Munich Electronica Show and Launches Treo Platform
- ON Semiconductor Launches Industry-Leading Analog and Mixed-Signal Platform
- Analog Devices ADAQ7767-1 μModule DAQ Solution for Rapid Development of Precision Data Acquisition Systems Now Available at Mouser
- Domestic high-precision, high-speed ADC chips are on the rise
- Microcontrollers that combine Hi-Fi, intelligence and USB multi-channel features – ushering in a new era of digital audio
- Using capacitive PGA, Naxin Micro launches high-precision multi-channel 24/16-bit Δ-Σ ADC
- Fully Differential Amplifier Provides High Voltage, Low Noise Signals for Precision Data Acquisition Signal Chain






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- FAQ_Use the start tone command to test the center frequency
- [STM32WB55 Review] BLE protocol stack and dual-core communication
- TI - MCU - MSP430 User Guide 4 -> PMM&SVS Power Management Monitoring Module
- Simple Discrete Single-Ended-to-Differential Precision Instrumentation Amplifier Circuit: High Common-Mode Input Range, 50% Power Saving
- Date spring meet beauty
- Medical Ventilators +STONE Touch Screen + STM32 Medical Ventilators +STONE Touch Screen + STM32
- 4G low power LTE wireless communication module information sharing
- Introduction to charging system with high efficiency charge pump charger
- I got another fun board from Espressif. Anyone want to play with it? ? Go to the post to find out.
- GD32E231 official routines cannot be purely software-based






 京公网安备 11010802033920号
京公网安备 11010802033920号