| TIM_OCMode | Library Description | explain |
| TIM_OCMode_Timing | TIM Output Compare Time Mode | Freeze, output compare not working |
| TIM_OOCMode_Active | TIM output compare active mode | When a comparison occurs, the output is forced high |
| TIM_OCMode_Inactive | TIM output comparison inactive mode | When a comparison occurs, the output is forced low |
| TIM_OCMode_Toggle | TIM output compare trigger mode | When a comparison occurs, the output flips |
| TIM_OCMode_PWM1 | TIM PWM Mode 1 | PWM1 |
| TIM_OCMode_PWM2 | TIM PWM Mode 2 | PWM2 |
/****************************************************************
Function: OC_GPIO_Init
Description: Timer output comparison pin initialization
Input: none
return: none
**********************************************************/
static void OCTiming_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE); //Turn on GPIOA clock
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
/****************************************************************
Function: OC_TIM2_Init
Description: Set the 4 output comparisons of timer 2
Input: none
return: none
**************************************************************/
static void OCTiming_TIM2_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_TimeBaseStructure.TIM_Period = 65535;//Timing period value
TIM_TimeBaseStructure.TIM_Prescaler = 0;//No pre-division
TIM_TimeBaseStructure.TIM_ClockDivision = 0;//Clock is not divided
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //Increase count
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //Initialize timer
/* -------------------------------------------------------
Timer configuration output comparison time mode:
the clock frequency of the timer is 72M.
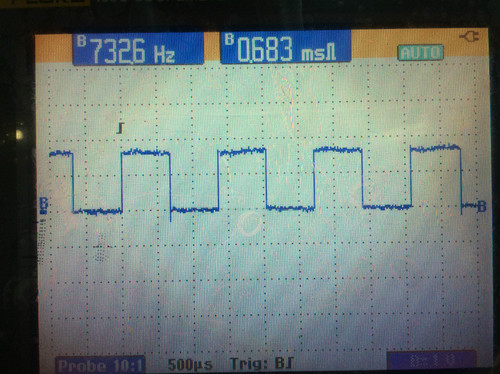
The frequency of PC6 output is 72M/CCR1_Val/2=732Hz, and the duty cycle is 50%.
The frequency of PC7 output is 72M/CCR2_Val/2=1099Hz, and the duty cycle is 50%.
The frequency of PC8 output is 72M/CCR3_Val/2=2197Hz, and the duty cycle is 50%.
The frequency of PC9 output is 72M/CCR4_Val/2=4395Hz, and the duty cycle is 50%.
---------------------------------------------------------*/
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Timing; //Output comparison time mode
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //Output enable
TIM_OCInitStructure.TIM_Pulse = CCR1_Val; //Set comparison value
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //When the timer count value is less than CCR1_Val, it is high level
TIM_OC1Init(TIM2, &TIM_OCInitStructure); //Initialize TIM2 output comparison channel 11
TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Disable); //Do not automatically re-transfer count value
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //Output enable
TIM_OCInitStructure.TIM_Pulse = CCR2_Val; //Set comparison valueTIM_OC2Init
(TIM2, &TIM_OCInitStructure); //Initialize output comparison channel 2 of TIM2
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Disable); //Do not automatically re-transfer count
valueTIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //Output enableTIM_OCInitStructure.TIM_Pulse
= CCR3_Val; //Set comparison valueTIM_OC3Init
(TIM2, &TIM_OCInitStructure); //Initialize output comparison channel 3 of TIM2
TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Disable); //Do not automatically re-transfer count valueTIM_OCInitStructure.TIM_OutputState
= TIM_OutputState_Enable; // output enable
TIM_OCInitStructure.TIM_Pulse = CCR4_Val; // set comparison value
TIM_OC4Init(TIM2, &TIM_OCInitStructure); // initialize TIM2 output comparison channel 3
TIM_OC4PreloadConfig(TIM2, TIM_OCPreload_Disable); // do not automatically re-transfer count value
TIM_ITConfig(TIM2, TIM_IT_CC1 | TIM_IT_CC2 | TIM_IT_CC3 | TIM_IT_CC4, ENABLE); // clear interrupt flag
TIM_Cmd(TIM2, ENABLE); // turn on timer
}
/****************************************************************
Function: OC_Int_Config
Description: Timer output compare interrupt configuration
Input: none
return: none
**********************************************************/
static void OCTiming_Int_Config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //TIM2 interrupt
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //Priority is 1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
/****************************************************************
Function: OC_Init
Description: Timer output comparison initialization
Input: none
return: none
**********************************************************/
void OCTiming_Init(void)
{
OCTiming_GPIO_Init(); //Output comparison pin configuration
OCTiming_TIM2_Init(); //Timer 2 output comparison initialization
OCTiming_Int_Config(); //Output comparison interrupt configuration
}
#ifndef __TIMEBASE_H__
#define __TIMEBASE_H__
#include "stm32f10x.h"
#define CCR1_Val 49152
#define CCR2_Val 32768
#define CCR3_Val 16384
#define CCR4_Val 8192
void OCTiming_Init(void);
#endif
/****************************************************************
Function: TIM2_IRQHandler
Description: Timer 2 interrupt service routine
Input: none
return: none
*************************************************************/
void TIM2_IRQHandler(void)
{
static u16 capture = 0;
if (TIM_GetITStatus(TIM2, TIM_IT_CC1) != RESET)//Output comparison channel 1
{
TIM_ClearITPendingBit(TIM2, TIM_IT_CC1);
GPIO_WriteBit(GPIOC, GPIO_Pin_6, (BitAction)(1 - GPIO_ReadOutputDataBit(GPIOC, GPIO_Pin_6)));//Flip level value, generate PWM wave with frequency of 72M/CCR1_Val/2 and duty cycle of 50%
capture = TIM_GetCapture1(TIM2);//Get comparison value
TIM_SetCompare1(TIM2, capture + CCR1_Val);//Reset comparison value
}
if (TIM_GetITStatus(TIM2, TIM_IT_CC2) != RESET)//Output comparison channel 1
{
TIM_ClearITPendingBit(TIM2, TIM_IT_CC2);
GPIO_WriteBit(GPIOC, GPIO_Pin_7, (BitAction)(1 - GPIO_ReadOutputDataBit(GPIOC, GPIO_Pin_7)));//Flip level value, generate PWM wave with frequency of 72M/CCR2_Val/2 and duty cycle of 50%
capture = TIM_GetCapture2(TIM2);//Get comparison value
TIM_SetCompare2(TIM2, capture + CCR2_Val);//Reset comparison value
}
if (TIM_GetITStatus(TIM2, TIM_IT_CC3) != RESET)//Output comparison channel 1
{
TIM_ClearITPendingBit(TIM2, TIM_IT_CC3);
GPIO_WriteBit(GPIOC, GPIO_Pin_8, (BitAction)(1 - GPIO_ReadOutputDataBit(GPIOC, GPIO_Pin_8)));//Flip the level value to generate a PWM wave with a frequency of 72M/CCR3_Val/2 and a duty cycle of 50%
capture = TIM_GetCapture3(TIM2);//Get comparison value
TIM_SetCompare3(TIM2, capture + CCR3_Val);//Reset comparison value
}
if (TIM_GetITStatus(TIM2, TIM_IT_CC4) != RESET)//Output comparison channel 1
{
TIM_ClearITPendingBit(TIM2, TIM_IT_CC4);
GPIO_WriteBit(GPIOC, GPIO_Pin_9, (BitAction)(1 - GPIO_ReadOutputDataBit(GPIOC, GPIO_Pin_9))); //Flip the level value to generate a PWM wave with a frequency of 72M/CCR4_Val/2 and a duty cycle of 50%
capture = TIM_GetCapture4(TIM2); //Get the comparison value
TIM_SetCompare4(TIM2, capture + CCR4_Val); //Reset the comparison value
}
}
/****************************************************************
Function: main
Description: main entry
Input: none
return: none
*************************************************************/
int main(void)
{
BSP_Init();
OCTiming_Init(); //Output comparison initialization
PRINTF("\nmain() is running!\r\n");
while(1)
{
LED1_Toggle();
Delay_ms(1000);
}
}



Previous article:STM32 timer output compare active mode
Next article:STM32 generates 7 PWM waves
Recommended ReadingLatest update time:2024-11-15 14:07

- Popular Resources
- Popular amplifiers
 usb_host_device_code
usb_host_device_code Transplantation of real-time operating system RT-ThreadSmart on STM32MP1
Transplantation of real-time operating system RT-ThreadSmart on STM32MP1




- Learn ARM development(16)
- Learn ARM development(17)
- Learn ARM development(18)
- Embedded system debugging simulation tool
- A small question that has been bothering me recently has finally been solved~~
- Learn ARM development (1)
- Learn ARM development (2)
- Learn ARM development (4)
- Learn ARM development (6)
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
- Do you know all the various motors commonly used in automotive electronics?
- What are the functions of the Internet of Vehicles? What are the uses and benefits of the Internet of Vehicles?
- Power Inverter - A critical safety system for electric vehicles
- Analysis of the information security mechanism of AUTOSAR, the automotive embedded software framework
- Brief Analysis of Automotive Ethernet Test Content and Test Methods
- How haptic technology can enhance driving safety
- Let’s talk about the “Three Musketeers” of radar in autonomous driving
- Why software-defined vehicles transform cars from tools into living spaces
- How Lucid is overtaking Tesla with smaller motors
- Wi-Fi 8 specification is on the way: 2.4/5/6GHz triple-band operation
- STM32F10x stepper motor encoder position control CANWeb source program
- MSP430F249_TimerA timer
- Synthesizable Verilog Syntax (Cambridge University, photocopy)
- [RVB2601 Creative Application Development] Short recording, playback and printing of recording data
- When the carrier data reaches the receiving end, how does the receiving end identify this information?
- SparkRoad Review (7) - FPGA Serial Port Test
- Disable AD auto-start JLink
- Seeking guidance - stc microcontroller remote upgrade program
- Problems with creating sheet symbols for multi-page schematics
- Zigbee Z-Stack 3.0.1 Modify channels using broadcasting






 京公网安备 11010802033920号
京公网安备 11010802033920号