#include "linux/errno.h"
Reference address:Touchscreen driver (input subsystem)
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
struct s3c_ts_regs {
};
static struct input_dev *s3c_ts_dev;
static volatile struct s3c_ts_regs *s3c_ts_regs;
static struct timer_list ts_timer;
//Wait until the stylus is pressed mode
static void enter_wait_pen_down_mode(void)
{
}
//Wait until the stylus is released mode
static void enter_wait_pen_up_mode(void)
{
}
//Enter X/Y direction ADC simultaneous conversion mode
static void enter_measure_xy_mode(void)
{
}
//Start ADC conversion
static void start_adc(void)
{
}
static int s3c_filter_ts(int x[], int y[])
{
#define ERR_LIMIT 10
}
static void s3c_ts_timer_function(unsigned long data)
{
}
//Stylus press, lift interrupt service function
static irqreturn_t pen_down_up_irq(int irq, void *dev_id)
{
}
static irqreturn_t adc_irq(int irq, void *dev_id)
{
}
static int s3c_ts_init(void)
{
}
static void s3c_ts_exit(void)
{
}
module_init(s3c_ts_init);
module_exit(s3c_ts_exit);
MODULE_LICENSE("GPL");
================================================================
Analysis:
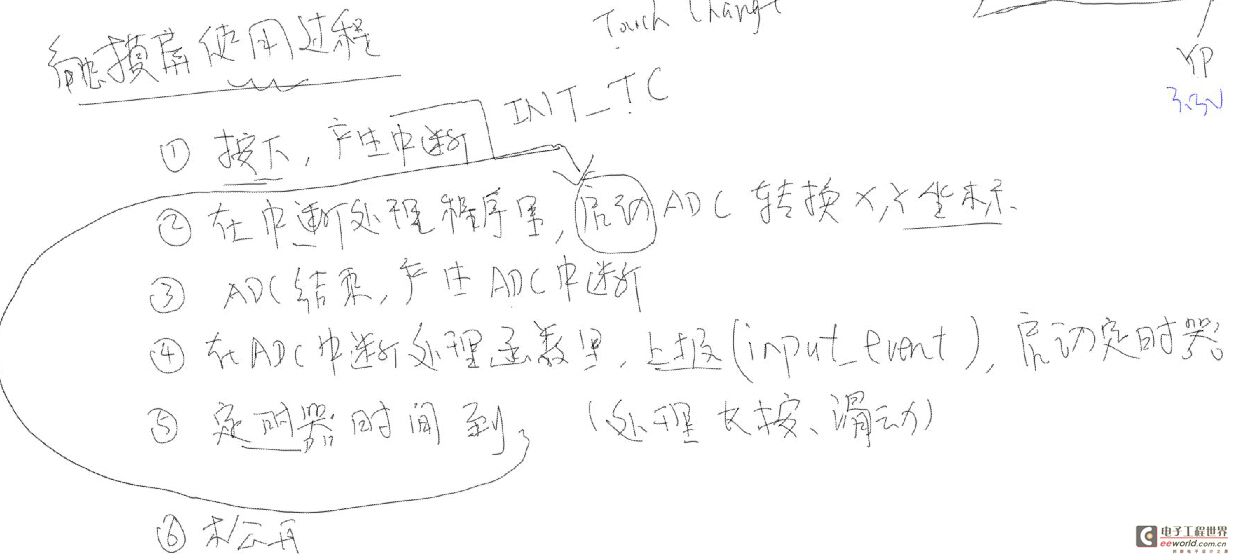
After loading the driver, run the s3c_ts_init function, and the program enters the wait-for-stylus-down mode enter_wait_pen_down_mode(). When the stylus is pressed, it enters the press interrupt service function, that is, pen_down_up_irq. After entering the interrupt service function, it immediately determines whether the stylus is still pressed. If the stylus is released at this time, the event is reported; if the stylus is still pressed at this time, it enters the ADC conversion mode for both X/Y directions at the same time, and starts ADC conversion. After the ADC conversion is completed, the ADC interrupt service program is entered, and the ADC data in the x and y directions are obtained from adcdat0 and adcdat1, and then it is determined whether the stylus has left. If it has left, the data is reported; otherwise, the ADC conversion data is saved and then it is determined whether the data collected by the ADC has reached 4 times. If it has accumulated to 4 times, the event is reported after software filtering, and the wait for the stylus to leave mode enter_wait_pen_up_mode is entered, and the timer is started to start timing to process continuous pressing events; if it is less than 4 times, the X/Y bidirectional simultaneous ADC conversion mode is entered again, and the ADC conversion is started. When the timing time is up, it enters the timing interrupt service function, determines whether the stylus has left, and reports the event if the stylus is released, and enters the wait for the stylus to press mode, otherwise it enters the X/Y bidirectional simultaneous ADC conversion mode again, and starts the ADC conversion. In order!
Test 2th~7th:
1. Make menuconfig to remove the original touch screen driver
-> Device Drivers
make uImage
Boot with the new kernel
2. insmod s3c_ts.ko
Press/release the stylus
Test 2th~7th:
1. ls /dev/event*
2. insmod s3c_ts.ko
3. ls /dev/event*
4. hexdump /dev/event0
0000000 29a4 0000 8625 0008 0003 0000 0172 0000
0000010 29a4 0000 8631 0008 0003 0001 027c 0000
0000020 29a4 0000 8634 0008 0003 0018 0001 0000
0000030 29a4 0000 8638 0008 0001 014a 0001 0000
0000040 29a4 0000 863c 0008 0000 0000 0000 0000
0000050 29a4 0000 c85e 0008 0003 0000 0171 0000
0000060 29a4 0000 c874 0008 0003 0001 027d 0000
0000070 29a4 0000 c87b 0008 0000 0000 0000
0000080 29a4 0000 ed37 0008 0003 0018 0000 0000
0000090 29a4 0000 ed48 0008 0001 014a 0000 0000
00000a0 29a4 0000 ed4a 0008 0000 0000 0000 0000
For the combined use of LCD and touch screen, please refer to "Tslib compilation and usage"
// Temporarily ignore the following three lines of commands
//sudo apt-get install autoconf
//sudo apt-get install automake
//sudo apt-get install libtool
Compile:
tar xzf tslib-1.4.tar.gz
cd tslib
./autogen.sh
mkdir tmp
echo "ac_cv_func_malloc_0_nonnull=yes" >arm-linux.cache
./configure --host=arm-linux --cache-file=arm-linux.cache --prefix=$(pwd)/tmp
make
make install
Install:
cd tmp
Then copy all 4 files in the tmp directory to the root directory of the development board
cp * /home/book/workspace/JZ2440_TestFile/system/first_fs
(The root directory of the development board when the network file system is used for startup, but it is not copied to the flash of the development board at this time. If you want to copy it to the flash of the development board, you can start it without the network file system. Use manual mounting to mount the file system to the mnt directory of the development board, and then copy the files in tmp from the mnt directory to the root directory of the development board. In this way, it is really on the flash of the development board.)
use:
Install s3c_ts.ko, lcd.ko first
1.
Modify line 1 of /etc/ts.conf (remove the # sign and the first space):
# module_raw input
to:
module_raw input
2. Set environment variables
export TSLIB_TSDEVICE=/dev/event0
export TSLIB_CALIBFILE=/etc/pointercal
export TSLIB_CONFFILE=/etc/ts.conf
export TSLIB_PLUGINDIR=/lib/ts
export TSLIB_CONSOLEDEVICE=none
export TSLIB_FBDEVICE=/dev/fb0
Use the following two commands to test:

Previous article:Writing a block device driver to simulate a disk using memory
Next article:LCD driver (input subsystem)
Recommended ReadingLatest update time:2024-11-15 20:27
10.NandFlash driver_write operation

In the previous section, we learned how to read NandFlash page by page. Now let's implement NandFlash page by page. First, let's look at the timing diagram of the NandFlash chip K9F2G08U0A.
According to the signal information of the I/O pin corner, we know that the steps required to implement the NandFlas
[Microcontroller]
- Popular Resources
- Popular amplifiers
-
 Siemens Motion Control Technology and Engineering Applications (Tongxue, edited by Wu Xiaojun)
Siemens Motion Control Technology and Engineering Applications (Tongxue, edited by Wu Xiaojun) - Modern Product Design Guide
- Modern arc welding power supply and its control
- Small AC Servo Motor Control Circuit Design (by Masaru Ishijima; translated by Xue Liang and Zhu Jianjun, by Masaru Ishijima, Xue Liang, and Zhu Jianjun)
 Siemens Motion Control Technology and Engineering Applications (Tongxue, edited by Wu Xiaojun)
Siemens Motion Control Technology and Engineering Applications (Tongxue, edited by Wu Xiaojun)
Recommended Content





Latest Microcontroller Articles
He Limin Column
Microcontroller and Embedded Systems Bible
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
MoreSelected Circuit Diagrams






MorePopular Articles
- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
MoreDaily News
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
Guess you like
- Professor Zhang Yueping: 5G brings about the trend of Antenna in Package (AiP) technology
- MSE-D150 Laser Distance Sensor
- ARM bare metal program vs. MCU - personal feelings
- PCB routing: Cyclone V MBGA
- Crystal oscillator is an important component in computers
- microPython + esp8266 + ws2812 = Colorful light ball
- [Flower carving hands-on] Interesting and fun music visualization series of small projects (08) --- four-digit 32-segment dot matrix screen
- Digital Signal Processing Implementation on FPGA.pdf
- Xianji official engineer's dry goods: Xianji HPM SDK development environment construction instructions on Linux system
- How does the Harry Potter interactive wand at Universal Studios work?






 京公网安备 11010802033920号
京公网安备 11010802033920号