Laser cutting machines can cut materials to the nearest millimeter.
When we turned the car's steering wheel, the wheel easily achieved precise turning angles;
…
In our lives, these natural scenes are all powered by motors silently! The motors can accurately determine the power angle and speed thanks to sensors.
Comparison of three commonly used encoders
According to the working method of the encoder, we divide the encoder into three categories: photoelectric encoder, rotary transformer, and magnetic encoder.
Photoelectric encoder, as the name implies, converts the mechanical geometric displacement on the output shaft into pulses or digital quantities through photoelectric conversion.
The output of the photoelectric encoder is usually three signal lines, of which the AB line is an orthogonal pulse with a phase difference of 90°, which can count the direction of motor rotation, and the Z line outputs a pulse signal of the rotation speed.

Principle of Photoelectric Encoder
The rotary transformer is similar to an ordinary transformer. The primary winding of the rotary transformer is used as the excitation winding, and the excitation signal is passed through during operation; the secondary side is used as the signal winding, and the signal is generated through the mutual inductance with the excitation winding during operation, and with relative rotation, the two-phase sine, cosine and sine signals containing the rotor position information are output, and the position angle is obtained after decoding by decoding software and hardware.
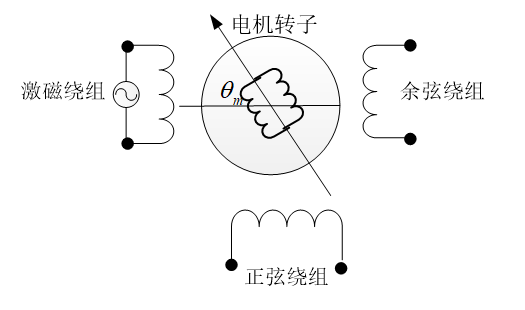
Principle of Rotary Transformer
The magnetic encoder uses a magnetoelectric design to generate or provide the position and speed of the motor by the change of the magnetic field of the magnetic induction device. The magnetic sensor inside the magnetic encoder is an important component, and their resistance will increase or decrease due to the change of the external magnetic field.
The change in resistance is called magnetic resistance, and this change is called magnetic resistance effect. The sensitivity of the magnetic sensor is very high, so the output of the magnetic encoder is very accurate.
Comparison of three encoders:
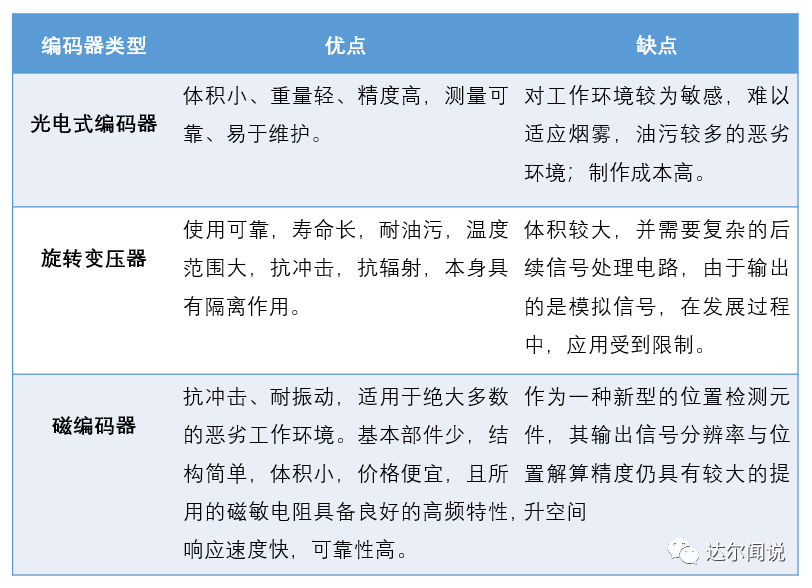
Compared with optical encoders and rotary transformers, magnetic encoders are used in many control applications because they require fewer components, have a simple structure, are easy to install, and are shock-resistant and corrosion-resistant. For example, magnetic encoders are used in servo CNC machine tools, drones, handheld gimbals, robots, and mechanical arms. In addition, magnetic encoders can be seen everywhere in automotive applications.
Application scenarios of magnetic encoders for typical encoders
✦ Before formally talking about the application, let's further popularize the working principle of the magnetic encoder:
the signal processing part of the magnetic encoder extracts high-precision angular position information from the sine and cosine signals output by the magnetic sensitive element through software and hardware technology.
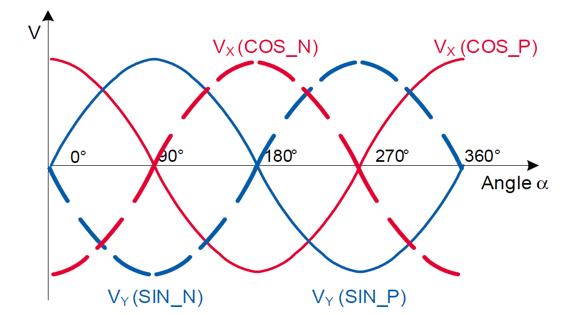
The hardware part of the magnetic encoder outputs the orthogonal signal, which is responsible for amplifying, conditioning, and transforming the two-phase output orthogonal signal of the sensor, so that the signal processed by the hardware can be suitable for sampling and software processing by the microprocessor, while the software part obtains the optimized angle position information from the collected two-phase orthogonal signal data through decoding operations and error correction of the sampled data, and outputs the angle position information in the form of incremental encoding or digital communication, thereby realizing the overall structural design of the magnetic encoder.
✦ Commonly used (position) magnetic encoder: It is not affected by harsh environmental factors and can always maintain its own high-precision output. Therefore, magnetic encoders are used in more and more high-precision occasions. The magnetoresistance effect of the magnetic sensitive element inside the magnetic encoder is usually divided into the following categories:
AMR (anisotropic magnetoresistance effect): The resistivity of ferromagnetic materials changes with the change of the angle between its own magnetization intensity and the current direction.
GMR (Giant Magnetoresistance Effect): Giant Magnetoresistance Effect refers to the phenomenon that the resistivity of magnetic materials changes greatly when there is an external magnetic field than when there is no external magnetic field. Giant Magnetoresistance is generated in layered magnetic film structures and appeared later than AMR, but it has a higher sensitivity and is the most widely used.
TMR (Tunneling Magnetoresistance Effect): It uses the track resistance effect of magnetic multilayer film materials to sense the magnetic field. It has a greater resistance change rate than ARM and GMR. It is the latest magnetoresistance effect, and the corresponding magnetic encoder output sensitivity is the highest.
Previous article:Design of high power density motor
Next article:Introduction to commonly used insulation materials in servo motors
- Popular Resources
- Popular amplifiers
 OPA651U
OPA651U




- Red Hat announces definitive agreement to acquire Neural Magic
- 5G network speed is faster than 4G, but the perception is poor! Wu Hequan: 6G standard formulation should focus on user needs
- SEMI report: Global silicon wafer shipments increased by 6% in the third quarter of 2024
- OpenAI calls for a "North American Artificial Intelligence Alliance" to compete with China
- OpenAI is rumored to be launching a new intelligent body that can automatically perform tasks for users
- Arm: Focusing on efficient computing platforms, we work together to build a sustainable future
- AMD to cut 4% of its workforce to gain a stronger position in artificial intelligence chips
- NEC receives new supercomputer orders: Intel CPU + AMD accelerator + Nvidia switch
- RW61X: Wi-Fi 6 tri-band device in a secure i.MX RT MCU
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
- CGD and Qorvo to jointly revolutionize motor control solutions
- CGD and Qorvo to jointly revolutionize motor control solutions
- Keysight Technologies FieldFox handheld analyzer with VDI spread spectrum module to achieve millimeter wave analysis function
- Infineon's PASCO2V15 XENSIV PAS CO2 5V Sensor Now Available at Mouser for Accurate CO2 Level Measurement
- Advanced gameplay, Harting takes your PCB board connection to a new level!
- Advanced gameplay, Harting takes your PCB board connection to a new level!
- A new chapter in Great Wall Motors R&D: solid-state battery technology leads the future
- Naxin Micro provides full-scenario GaN driver IC solutions
- Interpreting Huawei’s new solid-state battery patent, will it challenge CATL in 2030?
- Are pure electric/plug-in hybrid vehicles going crazy? A Chinese company has launched the world's first -40℃ dischargeable hybrid battery that is not afraid of cold
- Recruiting analog layout design engineers, based in Shanghai Pudong
- How to convert 232/485 serial port into Ethernet signal
- [Raspberry Pi 3B+ Review] TCP Client & Blocked Thread Creation & Cancellation
- Allwinner V853 heterogeneous AI intelligent vision development board evaluation - sample_virvi2vo test program startup analysis
- Open Source eBook: Computer Science from the Bottom Up
- Disassembly: Dialog's latest Bluetooth chip architecture design example for only $0.5
- Thank you for your help + Thank you Mr. Zhu for your help
- Purgatory Legend-IIC Battle
- 4 termination methods to teach you how to perfectly solve signal termination confusion
- Next, let's discuss whether the polished chips are real or fake.






 京公网安备 11010802033920号
京公网安备 11010802033920号