1. Production of tool chain
1.1 Tools
Software tool: crosstool-ng
Download address: git clone https://github.com/crosstool-ng/crosstool-ng
The crosstool-ng environment requires libncurse5-dev
sudo apt-get install libncurse5-dev
Install autoconf: sudo apt-get install autoconf
Enter the crosstool-ng directory, execute ./bootstrap, and generate the configure execution file
Check the installation environment. If any errors are reported, install the software: ./configure --prefix=`pwd`/crosstool
The required software is:
sudo apt-get install gperf bison flex texinfo help2man gawk
Execute the command make to execute the command:
make install
export PATH="${PATH}:`pwd`/crosstool/bin"
1.2 Start production
1.2.1 Create target folder
Create three folders in the root directory:
mkdir src x-tools crosstool

1.2.2 Environment
Enter the crosstool directory: cd ~/.crosstool
Execution: ct-ng list-samples
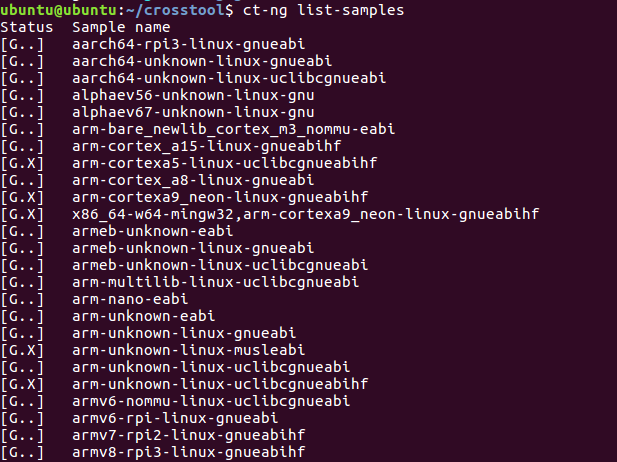
Select arm-unknown-linux-gnueabi as the template for the cross-compilation tool chain
Execute the command: ct-ng show-arm-unknown-linux-gnueabi to view the configuration required to compile the cross-compilation tool chain

Download gcc 6.3.0: wget http://ftp.gnu.org/gnu/gcc/gcc-6.3.0/gcc-6.3.0.tar.gz

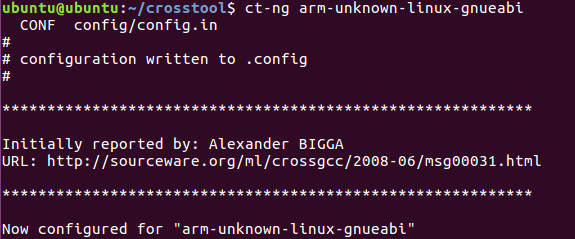
Execute command: ct-ng arm-unknown-linux-gnueabi
Execute command: ct-ng menuconfig

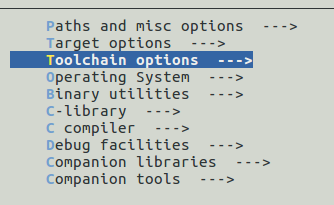
Select Target options
*** Target optimisations ***
(armv4t) Architecture level: instruction set architecture, exynos4412 is armv7-a architecture, -march=name
(arm920t) Emit assembly for CPU: CPU core type, -mcpu=name
() Tune for CPU : Optimization of CPU, please check the chip manual for details, -mtune=name

The latest version of crosstool-ng only needs to select the first and second projects.
Select toolchain options:

u-boot 2016.01 does not support GCC6, so the GCC version needs to be changed to between GCC5.0 and GCC6.0.
Save and exit.
1.2.3 Compilation
Execute command: ct-ng build

Compiled successfully:

Create environment variables:
vim .bashrc, add the following line
PATH=~/x-tools/arm-s3c2440a-linux-gnueabihf/bin:$PATH/
Execute source .bashrc
Execute arm-s3c2440a-linux-gnueabi-gcc -v

u-boot 2016.01 does not support GCC6, so the GCC version needs to be changed to between GCC5.0 and GCC6.0.
2. Establish u-boot working directory
Download u-boot_2016.01 version and unzip u-boot.

2.1 Board directory modification
2.1.1 Create jz2440 board
View the files in the ../board/samsung/ directory:

In this version, 2440 has been deprecated. Therefore, smdk2410 is selected as the template to create 2440 u-boot.

2.1.2 jz2440 file name modification
Modify file name:

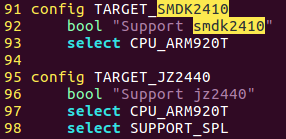
2.1.3 Kconfig modification
Modify the Kconfig and Makefile files and change smdk2410 inside to jz2440, as follows:
Kconfig file:
2.1.4 Makefile modification
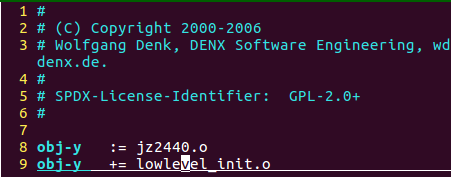
2.2 Modify header file

Add content to the header file:

Add support for S3C2440
Find the file containing the header file smdk2410.h:

Nothing needs to be modified
2.3 Modify configuration file
The current new version of u-boot is the same as the Linux source code. Make menuconfig is executed for configuration, so there must be jz2440 configuration in the configs directory.
Configuration in the config directory:


2.5 Modify the configuration file under arch/arm
arch/arm/Kconfig, which adds support for jz2440

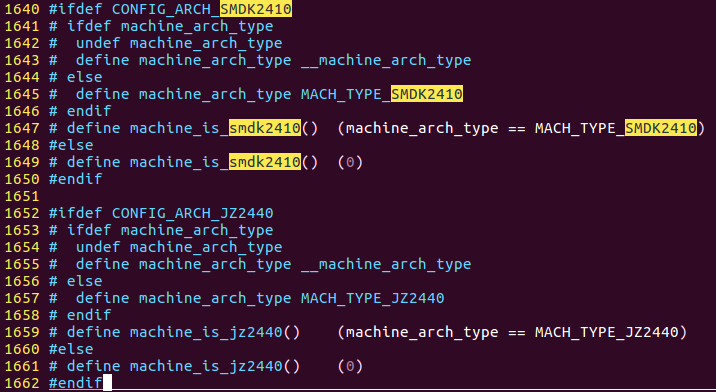
2.6 Modify rch/arm/include/asm/mach-types.h

3. Configure .config and compile u-boot
3.1 configuration.config
Execute command: make jz2440_defconfig

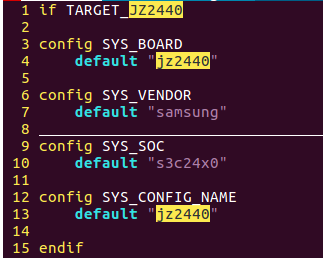
Execute command: make menuconfig
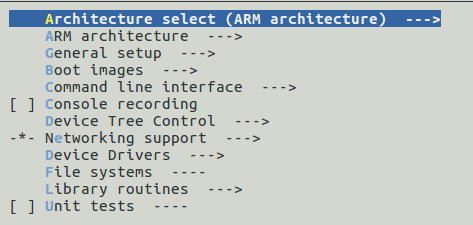
Select the target_select item in ARM architecture, and then select jz2440:

Configure the command line prompt of u-boot:
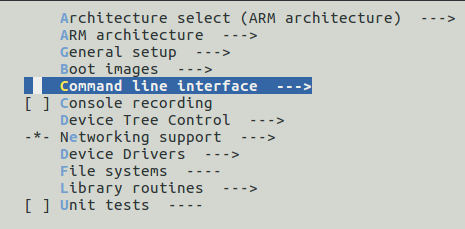

Save and exit configuration.
3.2 Compilation

Compiled successfully:
4. Compilation errors
4.1 Not enough room for program headers
arm-2440-linux-gnueabi-ld.bfd: u-boot: Not enough room for program headers, try linking with -N
arm-2440-linux-gnueabi-ld.bfd: final link failed: Bad value
make: *** [Makefile:1193: u-boot] Error 1
Solution: https://www.mail-archive.com/u-boot@lists.denx.de/msg235861.html
Add the following lines to the Makefile in the root directory:

Previous article:u-boot transplantation (2)---Work before modification: code flow analysis 1
Next article:13. S3C2440 bare metal—initialization code and MMU
- Popular Resources
- Popular amplifiers
 HFA1100MJ/883
HFA1100MJ/883


- Learn ARM development(16)
- Learn ARM development(17)
- Learn ARM development(18)
- Embedded system debugging simulation tool
- A small question that has been bothering me recently has finally been solved~~
- Learn ARM development (1)
- Learn ARM development (2)
- Learn ARM development (4)
- Learn ARM development (6)
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
- From probes to power supplies, Tektronix is leading the way in comprehensive innovation in power electronics testing
- From probes to power supplies, Tektronix is leading the way in comprehensive innovation in power electronics testing
- Sn-doped CuO nanostructure-based ethanol gas sensor for real-time drunk driving detection in vehicles
- Design considerations for automotive battery wiring harness
- Do you know all the various motors commonly used in automotive electronics?
- What are the functions of the Internet of Vehicles? What are the uses and benefits of the Internet of Vehicles?
- Power Inverter - A critical safety system for electric vehicles
- Analysis of the information security mechanism of AUTOSAR, the automotive embedded software framework
- Brief Analysis of Automotive Ethernet Test Content and Test Methods
- How haptic technology can enhance driving safety
- Five Experiences in RF Circuit Design
- What is a combined hydraulic cylinder?
- [MYX-1028X] (V) Serial communication Demo
- Overall design of wireless sensor network nodes
- EEWORLD University Hall ---- Fundamentals of Circuit Theory by Zhao Jinquan, Xi'an Jiaotong University
- Anxinke NB-IoT module review - some speculation about the failure of CH340
- Introducing a newly invented bandwidth amplifier circuit: "Angel"
- Embedded Qt-FFmpeg design an RTSP player
- dsp28335 ADC differential sampling
- Book Festival is coming, let me recommend a wave of must-read books on electromagnetic waves and microwave radio frequency






 京公网安备 11010802033920号
京公网安备 11010802033920号