LCD1602
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
1602 means that each line displays 16 characters, and a total of two lines can be displayed. If it is a 12232 liquid crystal (graphic liquid crystal), it means that it is composed of 122 columns and 32 rows, that is, a total of 122*32 dots
ps. Pay attention to the usage temperature. Usually the working range of liquid crystal is 0~+55℃, and the storage temperature range is -22~+60℃.
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Pin conditions:

- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Basic operation sequence:
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
| state | enter | output |
| read status | RS=0R/W=1E=1 | D0~D7=status word |
| Read data | RS=1R/W=1E=1 | D0~D7=data |
| write command | RS=0R/W=0E=1D0~D7=command code E=1 | none |
| write data | RS=1R/W=0E=1D0~D7=Data E=1 | none |
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
RAM internal mapping: 80 bytes

- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Status word description: //The status word reflects the current situation of the LCD screen. When STA7 is 1, it means that the display is busy. , cannot be operated
STA0~STA6 represent the value of the current address pointer
STA7 indicates read/write enable, =1 indicates base, =0 indicates permission

ps In principle, read and write detection must be performed before each read and write operation on the controller to ensure that STA7=0. In actual operation, since the operating speed of the microcontroller is slower than the response speed of the liquid crystal control, read and write detection may not be performed but only a brief Delay.
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Data pointer setting:
Users can access the internal 80-byte RAM through the following data address pointer to set the data address
80H+address code (0~27H, 40~67H)
Example: operate on the first address, 0x80+0x01
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
-other Script code:
| 01H | The display is cleared (the data pointer is cleared and all displays are cleared) |
| 02H | Display carriage return (data pointer cleared) |
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Initialization:
Display mode setting: 38H

Display on/off and cursor settings

- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
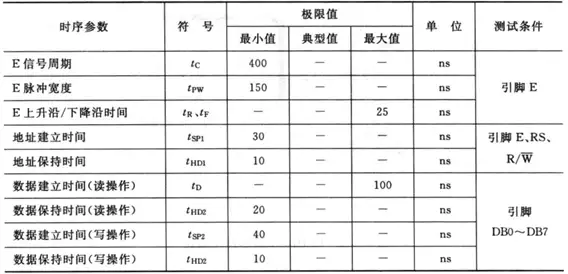
Read and write operation timing:
Read operation

write operation

Operating time parameters
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
-Operation method:
Operations on the LCD can be divided into two parts: data and instructions.
By operating RS, R/W, and E, four operations are performed: read status, read data, write instructions, and write data.
D0~D7 are used to input and output instruction codes and data
————————————————————————————————————————————
LCD1602 usage examples:
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Design requirements:
Use LCD1602 to display two lines of characters, display two lines of words, and two buttons to control the display or clear the screen

- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
-Design ideas:
Initialize LCD display //Refer to "Initialization" above
Open enable
Script operation
Set 16*2 display, 5*7 dot matrix, 8-bit data structure
Turn on the display, display the cursor without flashing
After reading and writing characters, the address pointer +1, the cursor +1, and the entire screen display does not move.
clear screen
Set the first character of the address display
initialization interrupt
Turn on interrupts
External interrupts 0 and 1
Infinite loop waiting for interrupt
key interrupt
"Display" button
Loop to write data (character array)
Command "newline"
Write the second row of data in a loop
Button "clear screen"
Command "clear screen"
Subfunction //Refer to the "Read and Write Operation Timing Table" above
write data
write command
1 #include
2 typedef unsigned char uchar;
3 sbit en = P3 ^ 4;
4 sbit rs = P3 ^ 5;
5 uchar code table1[] =
6 {
7 "SMC1602 0x01..."
8 };
9 uchar code table2[] =
10 {
11 "Hugh Dong."
12};
13 void Delay(uchar m)
14 {
15 uchar i, j;
16 for (i = m; i > 0; --i)
17 for (j = 110; j > 0; --j);
18}
19 /*Write data*/
20 void write_date(uchar date)
twenty one {
22 //Reference write operation timing diagram
23 rs = 1; //RS high level, write data
24 P2 = date; //Write data, corresponding to the timing diagram t_SP2 data establishment
25Delay(5);
26 en = 1; //Turn on the enable, give E a high pulse, and start writing data
27Delay(5);
28 en = 0; //Close enable and write data is completed
29 }
30 /* Write command*/
31 void write_com(uchar com)
32 {
33 //Basic principles are the same as writing data
34 rs = 0; //RS low level, write instruction
35 P2 = com;
36Delay(5);
37 en = 1;
38Delay(5);
39 en = 0;
40}
41 /* Initialize LCD */
42 voidInit()
43 {
44 en = 1;
45 write_com(0x38); //00111000 Set 16*2 display, 5*7 dot matrix, 8-bit data interface
46 write_com(0x0E); //00001110 Turn on display, display cursor, do not flash
47 write_com(0x06); //00000110 After reading and writing characters, the address pointer +1, the cursor +1, and the screen does not move


Previous article:MCS-51 microcontroller storage address space division
Next article:51 microcontroller interrupt mechanism (timer/counter)
 Glucose Meter Fundamentals and Design
Glucose Meter Fundamentals and Design AT89C2051_8-Bit Microcontroller with 2K Bytes Flash
AT89C2051_8-Bit Microcontroller with 2K Bytes Flash- Learn ARM development(16)
- Learn ARM development(17)
- Learn ARM development(18)
- Embedded system debugging simulation tool
- A small question that has been bothering me recently has finally been solved~~
- Learn ARM development (1)
- Learn ARM development (2)
- Learn ARM development (4)
- Learn ARM development (6)
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
- CGD and Qorvo to jointly revolutionize motor control solutions
- CGD and Qorvo to jointly revolutionize motor control solutions
- Keysight Technologies FieldFox handheld analyzer with VDI spread spectrum module to achieve millimeter wave analysis function
- Infineon's PASCO2V15 XENSIV PAS CO2 5V Sensor Now Available at Mouser for Accurate CO2 Level Measurement
- Advanced gameplay, Harting takes your PCB board connection to a new level!
- Advanced gameplay, Harting takes your PCB board connection to a new level!
- A new chapter in Great Wall Motors R&D: solid-state battery technology leads the future
- Naxin Micro provides full-scenario GaN driver IC solutions
- Interpreting Huawei’s new solid-state battery patent, will it challenge CATL in 2030?
- Are pure electric/plug-in hybrid vehicles going crazy? A Chinese company has launched the world's first -40℃ dischargeable hybrid battery that is not afraid of cold
- Bear Pie Huawei IoT operating system LiteOS bare metal driver transplantation 01-Explain driver transplantation using LED as an example
- 【GD32450I-EVAL】Simple oscilloscope demonstration
- [GD32E231 DIY Contest] 05. Automatic Fish Feeding Robot - PWM
- Shenzhen becomes the "world's first 5G city": challenges and business opportunities for the PCB industry
- 【Ended】 R&S Live 【PCI Express Gen 3 Conformance Test】
- Live broadcast at 10 am today [Renesas Electronics Secure IoT Suite provides you with secure cloud connection solutions
- Xun developed Qt for Android for i.MX6ULL Terminator QT application
- Applications of RF Transformers
- RF FilterRF knowledge classics to understand
- 【NXP Rapid IoT Review】+Hello world!






 京公网安备 11010802033920号
京公网安备 11010802033920号