USB overview
USB devices are now a very commonly used interface, and its plug-and-play feature brings great convenience to people. In embedded applications, USB is often used as an interface to communicate with the host computer, and is also used to store data through U disks. USB can be divided into low-speed, full-speed and high-speed devices according to communication speed. In our applications, low speed and full speed are the most common. Here we give a brief introduction to USB from the physical layer to the protocol layer. The principle of high-speed USB is the same. After understanding the working principles of low-speed and full-speed devices, it is easier to understand high-speed devices. We will not discuss it here.
Low Speed (Low Speed, 1.5Mbps): keyboard, mouse, stylus
Full Speed (12Mbps): Audio
High Speed (High Speed, 480Mbps): Video
The USB protocol is open and can be downloaded from the official website http://usb.orgdownload.
2. Host, Device

The picture above is a typical connection diagram of a USB full-speed host and device. The host must have external power supply capability. In the picture, you can see the microcontroller as the host. One pin is used to control the transistor or MOSFET and provide 5V power to the USB port. There are two ways to power the device: one is to get it from the 5V provided by the host through the USB bus, such as our commonly used U disk; the other is to get it from another power source, and the power cord from the host to the device does not need to be connected. If the device's 1.5k pull-up resistor is added to D-, then the device will be recognized by the host as a low-speed device. The pull-up of high-speed devices is added to D+ like that of full-speed devices, and needs to be further distinguished by software protocols.
Devices that are powered through the USB bus are divided into two configurations:
Low-power devices: Maximum current does not exceed 100mA
High-power devices: The enumeration phase after the device is first connected does not exceed 100mA, and the maximum after configuration is completed does not exceed 500mA.
All USB communications are initiated by the host. When the host detects that a device is connected, it will first ask the device to report itself to see what capabilities the device has, including the maximum current, and then the host will perform corresponding operations based on the reported description. This process is called bootstrapping (Enumeration). Devices declare their capabilities through descriptors, including:
Device Descriptor
Configuration Descriptor
Interface Descriptor
Endpoint Descriptor
String Descriptor
Endpoint is the basic unit of USB communication. Each USB device contains several endpoints. The data sent by the host will eventually reach an endpoint according to the device address and endpoint address. When the host obtains the data, it also issues a read data command to an endpoint. The endpoint then sends the data stored in its own buffer to the host.
Above the endpoints is a logical organization. Multiple endpoints can be grouped into one interface, and multiple interfaces can be grouped into one configuration. A device can have multiple configurations.
3. USB physical layer
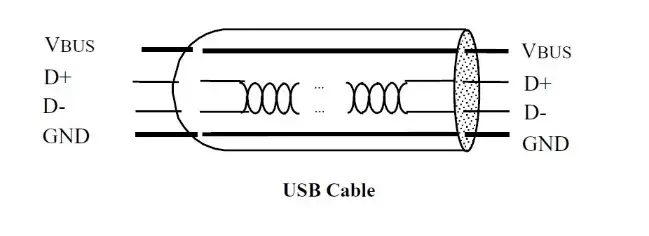
(USB Specification 2.0)
1 red Vbus(5V)
2 white D-
3 Green D+
4 black GND
Some USB interfaces will have an extra ID line to support OTG (On The Go). The two ends of the line that supports OTG are different. When one end is plugged into an OTG device, the identification pin ID of the device interface will be pulled low. After the device recognizes that its ID is pulled low, it will enter the host state (Host) and connect the line. The device ID on the other end is not pulled down and enters the device state (Device) by default. After that, master-slave switching can be done through soft protocol. However, there are not too many centralized applications of this kind. It is common for one device to be used as either a host or a device.
USB uses a differential transmission mode and has two data lines D+ and D-.
Differential 1 : D+ > VOH(min) (2.8V) and D- < VOL(max)(0.3V)
Differential 0 : D- > VOH and D+ < VOL
J state: Differential 0 for low-speed USB, Differential 1 for full-speed USB
K state: Differential 1 for low-speed USB, Differential 0 for full-speed USB
In addition, by pulling D+ and D- as single-ended signals low and high, some special states can be expressed.
SE0 state (Single Ended 0) : D+ low, D- low
SE1 state (Single Ended 1): D+ high, D- high
Reset signal: D+ and D- < VOL for >= 10ms
The host will send a Reset signal to set the device to the default unconfigured state before communicating with the device. That is, the host pulls down the two signal lines (SE0 state) and maintains it for 10ms.
You may be a little dizzy when you see this, but it doesn't matter. You will be even more dizzy if you look at the USB protocol.
We must not fall into this pit and be unable to get out. Just like we never trigger a start signal or pull out an end signal when using a serial port, the processing of these physical layer signal states is completely handled by the chip-integrated USB The controller handles it. Moreover, it is also necessary to provide a USB software protocol stack. It is unrealistic for users to completely figure out all the details by themselves. However, just like driving a car, if you have a deeper understanding of the principles of a car, you will be able to fully utilize the performance of the car.
Continuing, in addition to the above status, there are also:
Idle State, Resume State, Start of Packet, End of Packet, Disconnect, Connect.
4.Packet
Packet is the most basic unit of USB communication.

SOP: Start Of Packet, the flag changes from idle state to data packet sending.
SYNC: Synchronization segment, used for clock synchronization of USB devices.
PID: Packet Identifier. There are many types, which will be explained in detail below.
Address: Device and endpoint addresses. A host can attach multiple devices, and the host will assign different addresses to each device.
Frame Number: Frame number, incremented by 1 for each frame sent, and becomes 0 when it reaches 7FFFH.
Data: data segment.
CRC: Checksum.
EOP: End Of Packet.
Through different PIDs, data packets are divided into 4 major categories, and each major category contains some subcategories:
Token OUT, IN, SETUP, SOF
Data (Data) DATA0, DATA1
Handshake (Handshake) ACK, NAK, STALL, NYET
Special package (Special) PRE, ERR
5.Transaction
A Transaction always starts with the host issuing a token to the device. Again, all USB communication processes are initiated by the host. The three types of tokens divide Transaction into three categories:
OUT: The host sends data to the device.
IN: The host obtains data from the device.
SETUP: The host sets up the device.
OUT and IN in the USB protocol must be viewed from the perspective of the host. The following are typical examples of obtaining and sending data:

For every Transaction, Token is always required, and data segments and handshakes depend on the situation. For example, in the previous example, when the host issues an IN token to obtain data, if the device does not have the data ready, it can return NAK to end the Transaction.
6. Transfer
Okay, with the above, everything seems to be ready. But if you think about it further, there are still some problems that are difficult to solve. what? For example, what is the specified length of the DATA data segment? How often should the host initiate communication?
A USB host is allowed to mount multiple devices, and these devices vary widely: for example, a mouse needs to respond quickly after pressing a button and send location information to the host. The amount of data is very small, while a USB flash drive needs to transmit a large amount of data. The data. What should I do if the USB flash drive is transmitting data when I click the mouse?
In order to solve the above problems, USB first specifies four transmission types:
Control Transfers: Mainly used to set up the device when it is first connected to the host. There is also the usual management of equipment status. It requires bidirectional data transfer.
Bulk Data Transfers: Mainly used for scenarios where the volume is large but the transfer time is not strict. For example, USB flash drive.
Interrupt Data Transfers: Scenarios that require timely and accurate transmission of information. Interrupt transfers are always one-way. Such as the mouse.
Isochronous Data Transfers: Generally require a relatively fixed bandwidth, the delay is short and relatively certain. The transmission is one-way, and data does not need to be retransmitted after an error. Such as USB camera.
Then, in order to solve the problem of timely response of the device, USB issues a SOF token every 1ms (high-speed USB is every 125us), followed by the token for synchronization type transmission, followed by interrupt type, control type and batch data transmission. type. Within each Frame, Isochronous, Interrupt and Control will guarantee a certain bandwidth. The Bulk type has the lowest transmission priority and does not necessarily get bandwidth for data transmission in every frame.

A Transfer consists of one or more Transactions. For example, a control transmission can be composed of Setup, IN, OUT and other Transactions. Packet and Transaction are not allowed to be interrupted in the middle, and multiple Transactions of Transfer can be transmitted multiple times.
7. Summary
We gave a brief introduction to the physical layer and protocol layer of USB. In the following article, we will take a look at how USB works through practical examples, and discuss some issues that many engineers often overlook or are not aware of.
Previous article:What stages have I gone through from scratch to independent development of a microcontroller?
Next article:The third talk on peripheral modules of single-chip microcomputer, CAN bus
- Popular Resources
- Popular amplifiers
 5962F1422601VXC
5962F1422601VXC




- Learn ARM development(16)
- Learn ARM development(17)
- Learn ARM development(18)
- Embedded system debugging simulation tool
- A small question that has been bothering me recently has finally been solved~~
- Learn ARM development (1)
- Learn ARM development (2)
- Learn ARM development (4)
- Learn ARM development (6)
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
- Pickering Launches New Future-Proof PXIe Single-Slot Controller for High-Performance Test and Measurement Applications
- Apple faces class action lawsuit from 40 million UK iCloud users, faces $27.6 billion in claims
- Apple faces class action lawsuit from 40 million UK iCloud users, faces $27.6 billion in claims
- The US asked TSMC to restrict the export of high-end chips, and the Ministry of Commerce responded
- The US asked TSMC to restrict the export of high-end chips, and the Ministry of Commerce responded
- ASML predicts that its revenue in 2030 will exceed 457 billion yuan! Gross profit margin 56-60%
- Detailed explanation of intelligent car body perception system
- How to solve the problem that the servo drive is not enabled
- Why does the servo drive not power on?
- What point should I connect to when the servo is turned on?
- What is the A4G three-pin tube in the KA3842 switching power supply circuit?
- Made a TikTok-like APP that supports album video sliding carousel, now open source
- MSP430 clock setting and application
- MSP430F5438 Timer Summary
- [Shanghai Hangxin ACM32F070 development board + touch function evaluation board] Development environment construction and initial experience
- 520, Give Tang Monk a Wife
- DSP code optimization instructions in CCS
- Help, what kind of lights are these? I see them for the first time.
- Analysis and improvement of errors in making circuit board laminate structure drawings
- Share a flash tool for esp32-c3






 京公网安备 11010802033920号
京公网安备 11010802033920号