/****************************************************************
Function: SineWave_GPIO_Config
Description: Pin configuration
Input: none
return: none
**********************************************************/
static void SineWave_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //Initialize pin clock
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5; //DAC channel1 and channel2 corresponding pins
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //Push-pull output
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
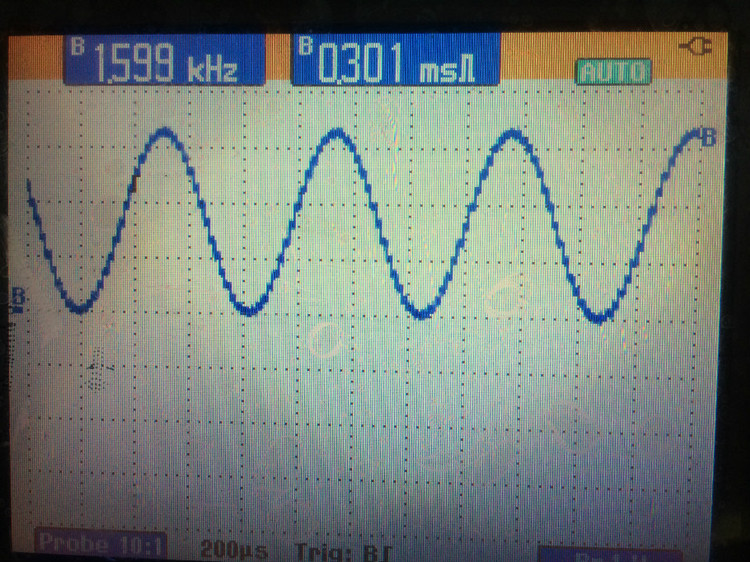
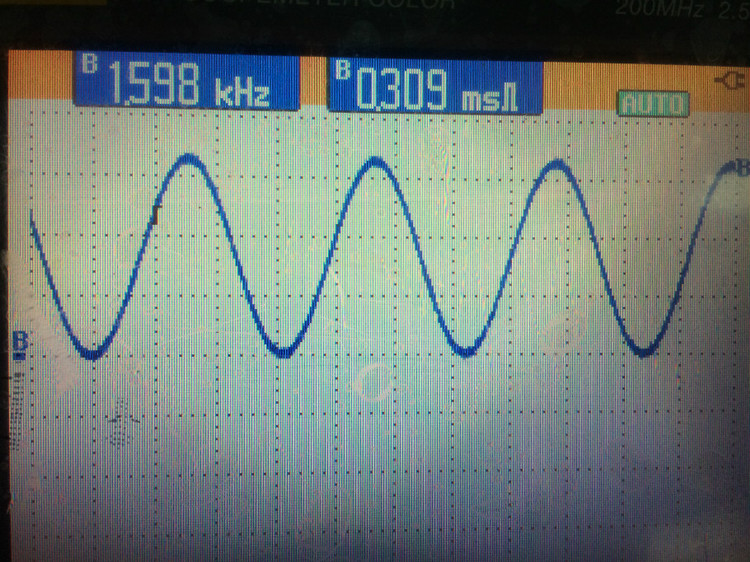
#define _800Hz (u16)(72000000/sizeof(Sine12bit)*2/800) //800Hz
#define _1600Hz (u16)(72000000/sizeof(Sine12bit)*2/1600) //1600Hz
3100 , 3143
, 3185, 3227, 3267, 3307, 3347, 3385, 3423, 3460, 3496, 3531, 3565, 3594, 3631,
3642, 3690, 3737, 3785, 3831, 3877, 3923, 3968, 3013, 3057, 3100, 3143, 3185,
3227, 3267, 3307, 3347, 3385, 3423,
3460, 3496, 3531, 3565, 3598, 3631, 3662, 3692, 3722,
3750, 3778, 3804, 3829, 3854, 3877, 3899, 3920, 3940, 3958, 3976,
3992, 4007, 4021, 4034, 4046, 4056, 40 65, 4073, 4080, 4086
, 4090, 4093, 4095, 4095, 4095, 4093, 4090, 4086, 4080, 4073
, 4065, 4056, 4046, 4034, 4021, 4007, 3992, 3976, 3958,
3940, 3920, 3899, 3877, 3854, 3829, 3804, 3778, 3750, 3722, 3692, 3662
, 3631, 3598, 3565, 3531, 3496, 3460, 34 23, 3385, 3347, 3307
, 3267, 3227, 3185, 3143, 3100, 3057, 3013, 2968, 2923,
2877, 2831, 2785, 2737, 2690, 2642, 2594, 2545, 2496,
2447, 2398, 2348, 2298, 2248, 2198, 2148, 2098, 2047, 1997, 1947, 1897,
1847, 1797, 1747, 1697, 1648, 1599, 1550, 15 01, 1453
, 1405, 1358, 1310, 1264, 1218, 1172, 1127, 1082, 1038,
995, 952, 910, 868, 828, 788, 748, 710, 672, 635,
599, 564, 530, 497, 464, 433, 403, 373, 345, 317,
291, 266, 241, 218, 196, 175, 155, 137, 119, 103,
88, 74, 61, 49, 39, 30, 22, 15, 9, 5,
2, 0, 0, 0, 2, 5, 9, 15, 22, 30,
39, 49, 61, 74, 88, 103, 119, 137, 155, 175,
196, 218, 241, 266, 291, 317, 345, 373, 1797,
1847, 1897, 1947, 1997 }; // const u16 Sine12bit[32] = { // sine 12bit, 16bit, 2047, 2048, 2049, 2050, 2060, 2072, 2080, 2092,
2127, 2172, 2218, 2264,
1310, 1358, 1405, 1453, 1501, 1550, 1599, 1648, 1697, 1747
, 1797, 1847, 1897, 1947, 1997 };
// const u16 Sine12bit[32] = { // sine 12bit, 16bit, 2047, 2080
, 2092, 2080, 2092 2447, 2831, 3185, 3498, 3750, 3939, 4056, 4095, 4056,
// 3939, 3750, 3495, 3185, 2831, 2447, 2047, 1647, 1263, 909,
// 599, 34 4, 155, 38, 0, 38, 155, 344, 599, 909, 1263, 1647};
/****************************************************************
Function: SineWave_TIM_Config
Description: Timer configuration
Input: none
return: none
**************************************************************/
static void SineWave_TIM_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2|RCC_APB1Periph_TIM6, ENABLE);//Initialize the clocks of timer 2 and
6TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period = _800Hz; //Set the frequency of sine wave
1TIM_TimeBaseStructure.TIM_Prescaler = 0x0; //No pre-
scalingTIM_TimeBaseStructure.TIM_ClockDivision = 0x0; //No clock
divisionTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//Increase
countTIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period = _1600Hz; //Set sine wave 2 frequency
TIM_TimeBaseInit(TIM6, &TIM_TimeBaseStructure);
TIM_SelectOutputTrigger(TIM2, TIM_TRGOSource_Update); //Update TIM2 output trigger
TIM_SelectOutputTrigger(TIM6, TIM_TRGOSource_Update); //Update TIM6 output trigger
}
/****************************************************************
Function: SineWave_DAC_Config
Description: DAC configuration
Input: none
return: none
*************************************************************/
static void SineWave_DAC_Config(void)
{
DAC_InitTypeDef DAC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_DAC, ENABLE);//Initialize DAC clock
DAC_StructInit(&DAC_InitStructure);
DAC_InitStructure.DAC_Trigger = DAC_Trigger_T2_TRGO;//Specify trigger timer TIM2 for DAC1
DAC_InitStructure.DAC_WaveGeneration = DAC_WaveGeneration_None;//No waveform generation
DAC_InitStructure.DAC_OutputBuffer = DAC_OutputBuffer_Disable; //Not enable DAC output buffer
DAC_Init(DAC_Channel_1, &DAC_InitStructure); //Initialize DAC channel1
DAC_InitStructure.DAC_Trigger = DAC_Trigger_T6_TRGO; //Specify trigger timer TIM6 for DAC2
DAC_Init(DAC_Channel_2, &DAC_InitStructure); //Initialize DAC channel2
DAC_Cmd(DAC_Channel_1, ENABLE); //Enable DAC channel1
DAC_Cmd(DAC_Channel_2, ENABLE); //Enable DAC channel2
DAC_DMACmd(DAC_Channel_1, ENABLE); //Enable DMA for DAC Channel1
DAC_DMACmd(DAC_Channel_2, ENABLE); //Enable DMA for DAC Channel2
}

#define DAC_DHR12R1 0x40007408 //Base address of peripheral DAC channel 1
#define DAC_DHR12R2 0x40007414 //Base address of peripheral DAC channel 2
/****************************************************************
Function: SineWave_DMA_Config
Description: DMA configuration
Input: none
return: none
**********************************************************/
static void SineWave_DMA_Config(void)
{
DMA_InitTypeDef DMA_InitStructure;
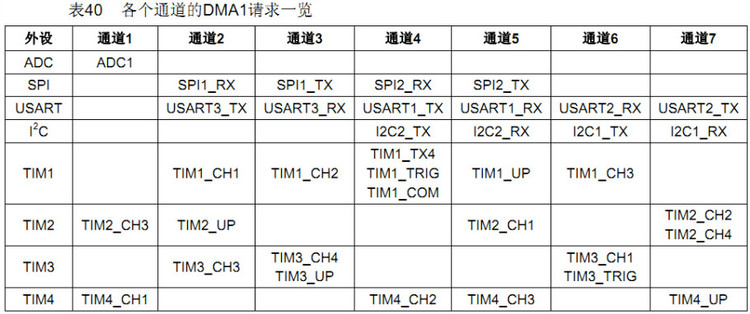
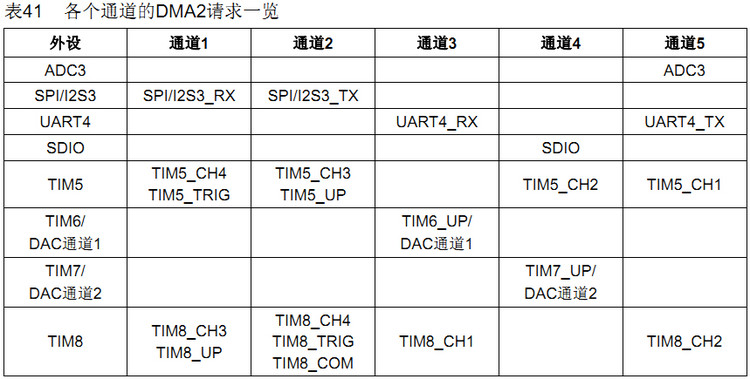
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA2, ENABLE);//Initialize DMA2 clock
DMA_DeInit(DMA2_Channel3); //Configure DMA to default values
DMA_InitStructure.DMA_PeripheralBaseAddr = DAC_DHR12R1;//Specify the target address of DMA2 channel 3 as DAC1_DHR12R1
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)&Sine12bit;//Specify the source address of DMA as array Sine12bit
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST; //Peripheral as the destination of data transferDMA_InitStructure.DMA_BufferSize
= sizeof(Sine12bit)/2; //DMA buffer sizeDMA_InitStructure.DMA_PeripheralInc
= DMA_PeripheralInc_Disable; //Peripheral machine address register unchangedDMA_InitStructure.DMA_MemoryInc
= DMA_MemoryInc_Enable; //Memory address register incrementDMA_InitStructure.DMA_PeripheralDataSize
= DMA_PeripheralDataSize_HalfWord; //Peripheral data width is half
wordDMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord; //Memory data width is half
wordDMA_InitStructure.DMA_Mode = DMA_Mode_Circular; //Work in circular cache mode. When the number of data transfers is 0, the initial configuration value is automatically restored
DMA_InitStructure.DMA_Priority = DMA_Priority_VeryHigh; //Very high priority
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; //The channel is not set to memory-to-memory mode, which is opposite to the circular mode
DMA_Init(DMA2_Channel3, &DMA_InitStructure); //Initialize DMA
DMA_DeInit(DMA2_Channel4);
DMA_InitStructure.DMA_PeripheralBaseAddr = DAC_DHR12R2; //Specify the target address of DMA2 channel 3 as DAC2_DHR12R2
DMA_InitStructure.DMA_Priority = DMA_Priority_VeryHigh;
DMA_Init(DMA2_Channel4, &DMA_InitStructure);
DMA_Cmd(DMA2_Channel3, ENABLE); //Enable DMA channel3
DMA_Cmd(DMA2_Channel4, ENABLE); //Enable DMA channel4
}


DAC_DHR12R1: 12-bit right-aligned data holding register for DAC channel 1 (offset: 0x08)
DAC_DHR12R2: 12-bit right-aligned data holding register for DAC channel 2 (offset: 0x14)
/****************************************************************
Function: SineWave_Init();
Description: Sine wave initialization
Input: none
return: none
*************************************************************/
void SineWave_Init(void)
{
SineWave_GPIO_Config(); //Configure pins
SineWave_TIM_Config(); //Configure timer
SineWave_DAC_Config(); //Configure DAC
SineWave_DMA_Config(); //Configure DMA
TIM_Cmd(TIM2, ENABLE); //Turn on TIM2
TIM_Cmd(TIM6, ENABLE); //Turn on TIM6
}
/****************************************************** ************
Function: main
Description: mainInput
: none
return: none
************************* ************************************/
int main(void)
{
BSP_Init();
SineWave_Init() ;
PRINTF("\nmain() is running!\r\n");
while(1)
{
LED1_Toggle();
Delay_ms(1000);
}
}
Previous article:STM32 ADC conversion
Next article:STM32 external interrupt analysis
- Popular Resources
- Popular amplifiers
 MAX40010TAUT+T
MAX40010TAUT+T




- Learn ARM development(16)
- Learn ARM development(17)
- Learn ARM development(18)
- Embedded system debugging simulation tool
- A small question that has been bothering me recently has finally been solved~~
- Learn ARM development (1)
- Learn ARM development (2)
- Learn ARM development (4)
- Learn ARM development (6)
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
- The US asked TSMC to restrict the export of high-end chips, and the Ministry of Commerce responded
- The US asked TSMC to restrict the export of high-end chips, and the Ministry of Commerce responded
- ASML predicts that its revenue in 2030 will exceed 457 billion yuan! Gross profit margin 56-60%
- Detailed explanation of intelligent car body perception system
- How to solve the problem that the servo drive is not enabled
- Why does the servo drive not power on?
- What point should I connect to when the servo is turned on?
- How to turn on the internal enable of Panasonic servo drive?
- What is the rigidity setting of Panasonic servo drive?
- How to change the inertia ratio of Panasonic servo drive
- 【STM32WB55 Review】_05_UART register configuration experiment
- Choosing the right bypass capacitor for high-speed circuit design
- Summary: littleshrimp plays with domestic FPGA (Gaoyun)
- EEWORLD University Hall--In-depth and Easy-to-understand FPGA Video Tutorial 2020 Edition (Privileged Students)
- Lesson 2: Basic knowledge of 5G standards
- Xunwei i.MX6ULL Terminator Process Basics - Process Creation
- Realization of Chinese Characters and Graphics Overlay Based on DSP
- TinyGo releases version 0.11.0
- PID learning materials, motor speed control and proteus simulation
- Today at 10:00 AM TI Live: Industry's Most Accurate 3D Hall Effect Position Sensor






 京公网安备 11010802033920号
京公网安备 11010802033920号