Introduction
The MD series ESC solution adopts FOC control technology and supports multiple types of (sensorless/Hall/servo) DC brushless motors . Users can adapt parameters based on the matching host computer according to the actual application scenario to achieve the best control effect. This article introduces the differences in parameter adaptation of various motors .
The MD series ESC solution is equipped with a dedicated parameter configuration host computer. Users can configure parameters according to the selected motor and application characteristics. When configuring parameters, different types of brushless motors have different configuration and debugging parameters.

Sensorless brushless motor
The control process of the brushless motor is generally to drag the motor to a certain speed through an open loop, and then switch to closed loop motion. The closed loop control is completed by measuring the electrical angle and speed through the back electromotive force generated during the motor movement, so the parameters of the brushless motor configuration include the motor parameters and startup parameters. First, let's look at the electrical parameters of the motor itself. The parameters are shown in the figure below, which are the number of pole pairs, phase resistance , maximum and minimum phase inductance, and back electromotive force constant. The operation is as follows;
first step:
Build the hardware environment (MD202/MD102 ESC), open MD Tool.exe on the host computer, click Connect to open the device, and then click the Parameter Update page, as shown below:

Figure 1
Step 2:
Configure and fill in the motor's own parameters, as shown in the figure below. The following parameters can be obtained from the motor manual or measured manually.

Figure 2
Step 3:
Configure the startup parameters. As shown in the figure below, hover the mouse cursor over the parameter name and a detailed description of the parameter will pop up. Fill in the parameters according to the prompts.

Figure 3

Figure 4
Step 4:
After modifying the parameters, click Write Parameters, then power on the ESC again, and then set a target speed in the following window. If the motor starts normally, the parameter configuration is successful.
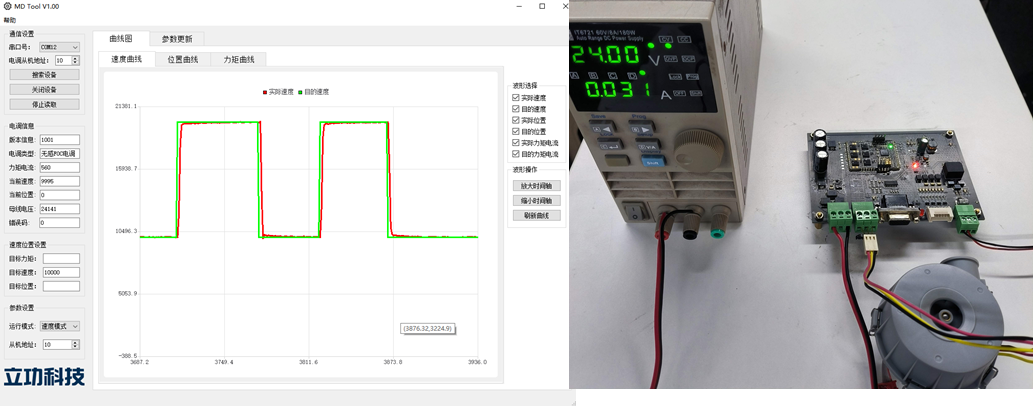
Figure 5
Hall Effect Motor
The brushless Hall sensor motor needs to be configured with the pole pair number and Hall resolution, after which the motor can be driven normally through self-learning.
first step:
Build the hardware (MD201/MD101 ESC), open MD Tool.exe on the host computer, connect and open the device, as shown below:

Figure 6
Step 2:
Configure the motor's own parameters and fill in the parameters as shown below:

Figure 7
Step 3:
After modifying the parameters, click Write Parameters, then power on the ESC again, and then set a target speed in the following window. If the motor starts normally, the parameter configuration is successful.

Figure 8
Servo brushless motor
The servo brushless motor needs to be configured with the number of pole pairs and encoder resolution, after which the motor can be driven normally, as shown below:
first step:
Build the hardware (MD200/MD100 ESC), open MD Tool V.exe on the host computer, and connect and open the device, as shown below:

Fig. 9
Step 2:
Configure the motor's own parameters and fill in the parameters as shown below:

Fig.10
Step 3:
After modifying the parameters, click Write Parameters, then power on the ESC again, and then set a target speed in the following window. If the motor starts normally, the parameter configuration is successful.

Fig.11
The MD series ESC selection table is as follows:

Fig.12
Previous article:Linear bearings and linear guides: load capacity and stability analysis
Next article:Application of APT 32-bit MCU in motor control
- Popular Resources
- Popular amplifiers
 LM393J
LM393J

- Red Hat announces definitive agreement to acquire Neural Magic
- 5G network speed is faster than 4G, but the perception is poor! Wu Hequan: 6G standard formulation should focus on user needs
- SEMI report: Global silicon wafer shipments increased by 6% in the third quarter of 2024
- OpenAI calls for a "North American Artificial Intelligence Alliance" to compete with China
- OpenAI is rumored to be launching a new intelligent body that can automatically perform tasks for users
- Arm: Focusing on efficient computing platforms, we work together to build a sustainable future
- AMD to cut 4% of its workforce to gain a stronger position in artificial intelligence chips
- NEC receives new supercomputer orders: Intel CPU + AMD accelerator + Nvidia switch
- RW61X: Wi-Fi 6 tri-band device in a secure i.MX RT MCU
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
- CGD and Qorvo to jointly revolutionize motor control solutions
- CGD and Qorvo to jointly revolutionize motor control solutions
- Keysight Technologies FieldFox handheld analyzer with VDI spread spectrum module to achieve millimeter wave analysis function
- Infineon's PASCO2V15 XENSIV PAS CO2 5V Sensor Now Available at Mouser for Accurate CO2 Level Measurement
- Advanced gameplay, Harting takes your PCB board connection to a new level!
- Advanced gameplay, Harting takes your PCB board connection to a new level!
- A new chapter in Great Wall Motors R&D: solid-state battery technology leads the future
- Naxin Micro provides full-scenario GaN driver IC solutions
- Interpreting Huawei’s new solid-state battery patent, will it challenge CATL in 2030?
- Are pure electric/plug-in hybrid vehicles going crazy? A Chinese company has launched the world's first -40℃ dischargeable hybrid battery that is not afraid of cold
- [Zhongke Bluexun AB32VG1 RISC-V Evaluation Board] Try to use RTThread multitasking
- CC3200 wireless wifi processor full voice interactive control smart home system
- Pre-registration for the prize live broadcast | ON Semiconductor's advanced image sensor solutions for the Internet of Things
- Excuse me, how does the electric meter with both steps and peaks and valleys work?
- Free | VIP tickets to EDI CON, the annual RF conference (Beijing, April 1-3)
- Year-end benefits! 2019 TI Industrial Applications Selected Courses Summary, Grab the Building to Win Gifts
- [OrCAD] How to display the name of the offpage connector after it is manually hidden?
- AD9 interface issues
- It seems like I'm in trouble. I dropped a bunch of chips on the ground. I have to pick them up with my hands or tweezers. I'm waiting online. It's urgent.
- 【LuatOS-ESP32】Development environment construction






 京公网安备 11010802033920号
京公网安备 11010802033920号