The serial port control register of the microcontroller is SCON, and its format is as follows:

The serial port has four working modes, namely 00, 01, 10, and 11. Mode 0 is a synchronous shift register, and modes 1, 2, and 3 are asynchronous 10, 11, and 11-bit transceiver modes. Mode 1, i.e. 10-bit asynchronous transceiver mode, is commonly used.
The specific analysis of the 10-bit data transmission and reception of mode 01 is as follows:


As above, when the microcontroller needs to receive data, it also executes the same steps. First, it receives 8 bits of data, and then sets the receiving flag RI to 1.
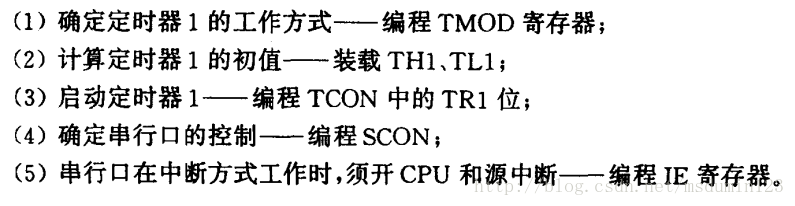
The initialization steps of the serial port are mainly to set the timer 1 that generates the baud rate, the serial port control box interrupt control, the steps are as follows:
Code:
//Serial port initialization program
TMOD&=0x0f;
TMOD|=0x20;
TH1=0XFD; //Set the baud rate to 9600
TL1=0xFD;
TR1=1; //Start timer T1
SCON=0X50; //10-bit data is sent and received asynchronously, the baud rate is controlled by timer T1, allowing serial port reception
ES=1; //Enable serial port interrupt
//Serial port initialization completed
Below I wrote a program for serial port communication with PC:
#include
unsigned char flag,i;
unsigned int k,j;
unsigned char a[32]={0};
unsigned char code table[6]="I get ";
void init()
{
TMOD=0x20; //Set timer working mode 2
TH1=0xfd; //Load initial value into timer 1
TL1=0xfd; //same as above
TR1=1; //Start T1 timer
SM0=0; //Set working mode 1
SM1=1; //same as above
REN=1; // Allow serial port to receive
EA=1; //Open the general interrupt
ES=1; //Open serial port interrupt
}
void main()
{
init();
while(1)
{
if(flag==1)
{
ES=0;
for(i=0;i<6;i++)
{
SBUF=table[i];
while(!TI);
TI=0;
}
ES=1;
for(k=0;k<0xFFFF;k++);
for(i=0;i<32;i++)
{
SBUF=a[i];
while(!TI);
TI=0;
}
flag=0;
}
}
}
void ser() interrupt 4 //interrupt program, receive data block, flag position 1
{
flag=1;
if(RI==1){
a[j++]=SBUF;
RI=0; //Manual clear
}
}
The serial communication effect is as follows:
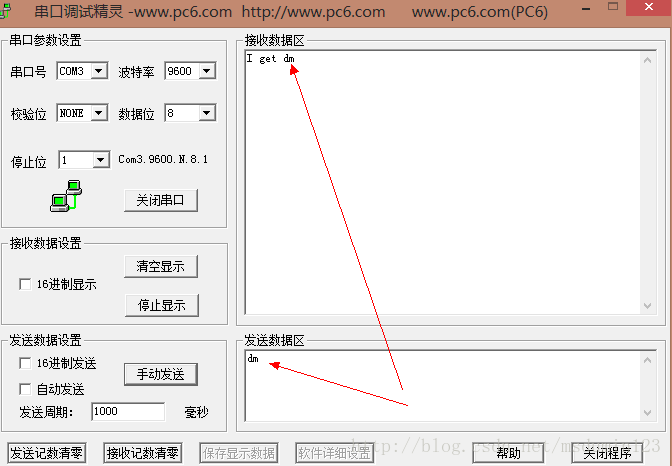
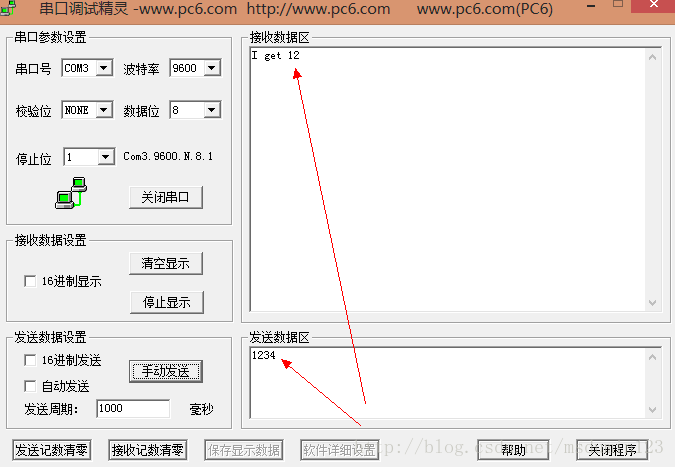
But there is a small problem with my program. I have tried many ways to solve it, but all failed. When the data I input is greater than 2 bytes, it can only return the first two bytes of data. As shown below:
Previous article:Interaction with host computer via serial communication of C51 MCU
Next article:A Brief Discussion on UART Serial Communication (Part 3) -- Character and Data Conversion
- Popular Resources
- Popular amplifiers
 HFA9P0003-9-T
HFA9P0003-9-T

- Naxin Micro and Xinxian jointly launched the NS800RT series of real-time control MCUs
- How to learn embedded systems based on ARM platform
- Summary of jffs2_scan_eraseblock issues
- Application of SPCOMM Control in Serial Communication of Delphi7.0
- Using TComm component to realize serial communication in Delphi environment
- Bar chart code for embedded development practices
- Embedded Development Learning (10)
- Embedded Development Learning (8)
- Embedded Development Learning (6)
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- Intel promotes AI with multi-dimensional efforts in technology, application, and ecology
- ChinaJoy Qualcomm Snapdragon Theme Pavilion takes you to experience the new changes in digital entertainment in the 5G era
- Infineon's latest generation IGBT technology platform enables precise control of speed and position
- Two test methods for LED lighting life
- Don't Let Lightning Induced Surges Scare You
- Application of brushless motor controller ML4425/4426
- Easy identification of LED power supply quality
- World's first integrated photovoltaic solar system completed in Israel
- Sliding window mean filter for avr microcontroller AD conversion
- What does call mean in the detailed explanation of ABB robot programming instructions?
- STMicroelectronics discloses its 2027-2028 financial model and path to achieve its 2030 goals
- 2024 China Automotive Charging and Battery Swapping Ecosystem Conference held in Taiyuan
- State-owned enterprises team up to invest in solid-state battery giant
- The evolution of electronic and electrical architecture is accelerating
- The first! National Automotive Chip Quality Inspection Center established
- BYD releases self-developed automotive chip using 4nm process, with a running score of up to 1.15 million
- GEODNET launches GEO-PULSE, a car GPS navigation device
- Should Chinese car companies develop their own high-computing chips?
- Infineon and Siemens combine embedded automotive software platform with microcontrollers to provide the necessary functions for next-generation SDVs
- Continental launches invisible biometric sensor display to monitor passengers' vital signs
- [Repost] What are the key points to follow in EMC processing?
- 20 "Million Miles" Raspberry Pi Car - Motor Control Learning (Control Speed)
- [RVB2601 debug record] The function in the c file is not declared in the header file
- [Raspberry Pi Pico Review] On-chip temperature detection
- STM32F407 simple vision board (recognition of QR codes, data matrix codes, apriltags, round and square shape detection)
- A Brief Review of EDA Software at Home and Abroad
- 【ST NUCLEO-G071RB Review】PWR
- There are many tricks for salary cuts and layoffs. What should you do if you encounter such a situation?
- Have you ever seen Koizumi suffer so badly? - The Chinese people are so happy
- [AB32VG1 development board review] TF card and file reading and writing applications






 京公网安备 11010802033920号
京公网安备 11010802033920号