Main components:
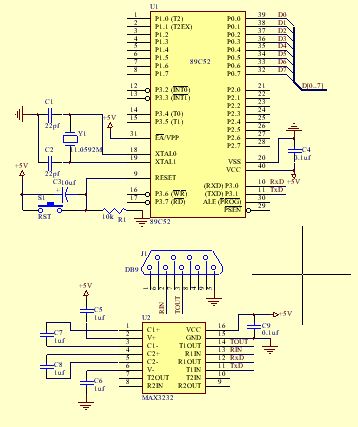
1. AT89C52 single-chip microcomputer chip, used to control serial port communication.
2. Interface level conversion chip MAX3232 is used to realize the conversion between TTL level and RS-232 level.
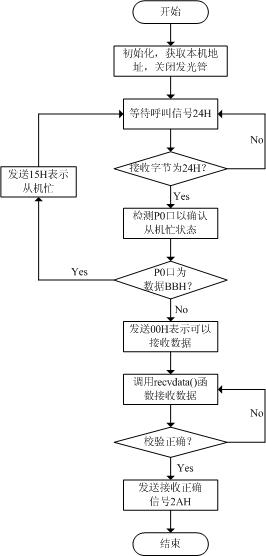
Test flow chart: host part

Slave part:
Test circuit diagram:
Test program code:
//PPDataR.h program
#ifndef _PPDATAR_H // Prevent PPDataT.h from being referenced repeatedly
#define _PPDATAR_H
#include
#include
#define uchar unsigned char
#define uint unsigned int
/* Handshake signal macro definition */
#define CALL 0x24 // Host call
#define BUSY 0x15 // Slave is busy
#define OK 0x00 // Slave is ready
#define SUCC 0x2A // Receive successfully
#define ERR 0xF0 // Receive error
#define MAXLEN 64 // Maximum length of the buffer
uchar buf[MAXLEN];
#endif
//PPDataR.c program
#include "PPDataR.h"
/* Send data function */
uchar recvdata(uchar *buf)
{
uchar i,tmp;
uchar len; // Save data length
uchar ecc; // Save the check byte
/* Receive data length bytes */
RI = 0;
while(!RI);
len = SBUF;
RI = 0;
/* Use the value of len to initialize the check byte ecc */
ecc = len;
/* Receive data */
for (i=0;i { while(!RI); *buf = SBUF; ecc = ecc^(*buf); // Perform byte check RI = 0; buf++; } *buf = 0; // indicates the end of data /* Receive checksum byte */ while(!RI); tmp = SBUF; RI = 0; /* Perform data verification */ ecc = tmp^ecc; if (ecc!=0) // If the check is wrong { *(buf-len) = 0; // Clear the data buffer /* Send verification error signal ERR */ TI = 0; SBUF = ERR; while(!TI); TI = 0; return 0xff; // Return 0xff to indicate verification error } /* Send verification success signal SUCC */ TI = 0; SBUF = SUCC; while(!TI); TI = 0; return 0; // Verification successful, return 0 } void init_serial() { TMOD = 0x20; // Timer T1 uses working mode 2 TH1 = 250; TL1 = 250; TR1 = 1; // Start timing PCON = 0x80; // SMOD = 1 SCON = 0x50; // Working mode 1, baud rate 9600kbit/s, receiving is allowed } /* Main program */ void main() { uchar tmp = 0; /* Serial port initialization */ init_serial(); EA = 0; // Disable all interrupts while(1) { /* If the received data is not CALL, continue waiting */ while (tmp!=CALL) { RI = 0; while(!RI) tmp = SBUF; RI = 0; } /* Check the P0 port to determine whether it is currently busy. If P0=0xBB, it is busy */ P0 = 0xff; tmp = P0; if(tmp==0xBB) // If the P0 port is 0xBB, send a BUSY signal { TI = 0; SBUF = BUSY; while(!TI); TI = 0; continue; } /* Otherwise, send an OK signal, indicating that the slave can receive data */ TI = 0; SBUF = OK; while(!TI); TI = 0; /* Data receiving */ tmp = 0xff; while(tmp==0xff) { tmp = recvdata(buf); // If verification fails, 0xff is returned; if reception succeeds, 0 is returned } } }
Previous article:Single chip microcomputer realizes short distance wireless transmission
Next article:Realizing Intelligent Signal Generator Using Integrated Chip MAX038
- Popular Resources
- Popular amplifiers
 LM7121IN
LM7121IN




- Learn ARM development(16)
- Learn ARM development(17)
- Learn ARM development(18)
- Embedded system debugging simulation tool
- A small question that has been bothering me recently has finally been solved~~
- Learn ARM development (1)
- Learn ARM development (2)
- Learn ARM development (4)
- Learn ARM development (6)
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
- Analysis of the application of several common contact parts in high-voltage connectors of new energy vehicles
- Wiring harness durability test and contact voltage drop test method
- From probes to power supplies, Tektronix is leading the way in comprehensive innovation in power electronics testing
- From probes to power supplies, Tektronix is leading the way in comprehensive innovation in power electronics testing
- Sn-doped CuO nanostructure-based ethanol gas sensor for real-time drunk driving detection in vehicles
- Design considerations for automotive battery wiring harness
- Do you know all the various motors commonly used in automotive electronics?
- What are the functions of the Internet of Vehicles? What are the uses and benefits of the Internet of Vehicles?
- Power Inverter - A critical safety system for electric vehicles
- Analysis of the information security mechanism of AUTOSAR, the automotive embedded software framework
- Qorvo launches payload products into space to commemorate its 5th anniversary, speaking with strength!
- Temperature measurement in the electronics and semiconductor industries
- Working principle and structure analysis of variable frequency series resonance
- EEWORLD University ---- Linux driver strategy and framework
- Phase shifter classification and working principle (Part 1)
- [TI recommended course] #Live replay: Application of TI millimeter wave sensors in smart home#
- EEWORLD University ---- Live playback: The most important component of the analog world - Signal chain and power supply: Amplifier special
- Help, how to calculate the voltage gain of an amplifier circuit?
- Xilinx XPE Power Estimation Software Setup Advisory
- Electronic password lock based on single chip microcomputer






 京公网安备 11010802033920号
京公网安备 11010802033920号