Opening remarks:
For details, please refer to the source code explanation. This program example directly changes the source file in Section 4 to the multi-file programming mode.
(1) Hardware platform:
Based on Zhu Zhaoqi 51 single-chip microcomputer learning board. Change the source file in Section 4 to the multi-file programming mode.
(2) Function: Same as the function in Section 4 above, make an LED flash.
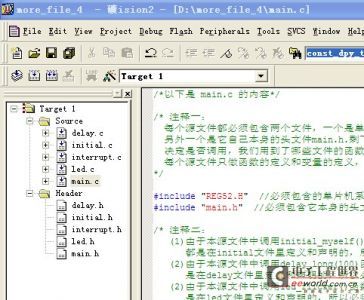
(3) Screenshot preview of Keil multi-file programming:
 more_file_4.rar (23.69 KB, Downloads: 214)
more_file_4.rar (23.69 KB, Downloads: 214)
Keywords:MCU
Reference address:Section 68: Multi-file programming skills of single-chip C language
Many people also call multi-file programming modular programming. In fact, I think it is more practical to call it multi-file programming. There are two biggest advantages of multi-file programming. One is that it adds a directory to our program, which is convenient for us to find. Another advantage is that it is convenient to transplant functional program modules that others have already made. Using this feature, it is particularly suitable for teams to work on large projects together. When many beginners first start learning multi-file programming, they often encounter problems such as duplicate definitions. Do you want to know how to solve these problems? As long as you follow the rules taught by Hongge below, these problems will not exist.
First: Keep each file in pairs. Every .c source file must have a .h header file corresponding to it, and every .h header file must have a .c source file corresponding to it. For example: main.c and main.h, delay.c and delay.h.
Second: The .c source file is only responsible for the definition of functions and variables, but not for the declaration of functions and variables. For example:
unsigned char ucLedStep=0; //This is the definition of global variables
void led_flicker() //This is the function definition
{
//…The specific code content is inside
}
Third: The .h header file is only responsible for function declarations and variable declarations, as well as constant and IO port macro definitions, but not for function definitions and variable definitions. For example:
#define const_time_level 200 //This is a constant macro definition
sbit led_dr=P3^5; //This is the macro definition of the IO port
void led_flicker(); //This is the function declaration
extern unsigned char ucLedStep; //This is a global variable declaration, and cannot be assigned an initial value
Fourth: Each .h header file must be fixed with #ifndef, #define, #endif statements as templates. This template is used to avoid errors caused by repeated inclusion of the contents in the header file during compilation. For the flag variable _XXX_, Hongge recommends using its own file name with leading and trailing underscores_.
for example:
#ifndef _LED_ //The flag variable _LED_ is named after its own file name
#define _LED_ //The flag variable _LED_ is named after its own file name
#define const_time_level 200 //This is a constant macro definition
sbit led_dr=P3^5; //This is the macro definition of the IO port
void led_flicker(); //This is the function declaration
extern unsigned char ucLedStep; //This is a global variable declaration, and cannot be assigned an initial value
#endif
Fifth: Each .h header file must declare all defined functions and global variables in its corresponding .c source file. Note: all global variables in the .c source file must be declared once in its corresponding .h header file, not just functions. This place is easily overlooked.
For example: in the led.h header file:
void led_flicker(); //This is the function declaration, because this function is defined in the led.c file.
extern unsigned char ucLedStep; //This is a global variable declaration, no initial value is allowed
Sixth: Each .c source file must contain two files, one is the system header file REG52.H of the microcontroller, and the other is its own header file such as initial.h. The remaining header files are called based on actual conditions. If we use the functions, global variables or macro definitions of certain files, we need to call the corresponding header files.
For example: in the initial.c source file:
#include"REG52.H" //MCU system header file that must be included
#include"initial.h" //Must include its own header file
/* Comments:
Since the led_dr statement is used in this source file, and led_dr is a macro definition in the led.h file, led.h must also be included.
*/
#include"led.h" //Because the led_dr statement is used in this source file, led.h must also be included
void initial_myself() //This is the function definition
{
led_dr=0; //led_dr is defined and declared in the led file
}
Seventh: When declaring a global variable, you must add the extern keyword, and you must not assign an initial value when declaring a global variable, for example:
extern unsigned char ucLedStep=0; //This is absolutely wrong.
extern unsigned char ucLedStep; //This is the declaration of a global variable, this is correct
Eighth: The compiler does not allocate memory space for function and global variable declarations. The compiler allocates memory space for function and global variable definitions. Function and global variable definitions can only appear once in a .c source file, while function and global variable declarations can appear in multiple .h files.
For details, please refer to the source code explanation. This program example directly changes the source file in Section 4 to the multi-file programming mode.
(1) Hardware platform:
Based on Zhu Zhaoqi 51 single-chip microcomputer learning board. Change the source file in Section 4 to the multi-file programming mode.
(2) Function: Same as the function in Section 4 above, make an LED flash.
(3) Screenshot preview of Keil multi-file programming:

(4) Download the entire source code explanation project file:
 more_file_4.rar (23.69 KB, Downloads: 214)
more_file_4.rar (23.69 KB, Downloads: 214)(5) The source code is explained as follows (note that the following code cannot be directly put into a source file for compilation):
- /*The following is the content of main.h*/
- /* Note 1:
- Each header file is fixed with #ifndef, #define, #endif
- For the template, I suggest using the file name itself plus leading and trailing underscores for the identifier variable _XXX_.
- This flag variable name is used to prevent multiple inclusion errors. Please see Note 2 for detailed explanation.
- Each header file only declares functions and variables, as well as macro definitions for constants and IO ports.
- Function definition and variable definition.
- */
- #ifndef _MAIN_ //The flag variable _MAIN_ is named after its own file name
- #define _MAIN_ //The flag variable _MAIN_ is named after its own file name
- void main(); //This is the function declaration
- #endif
- /* Note 2:
- The above statement
- #ifndef
- #define
- Insert more content...
- #endif
- Similar to treating _MAIN_ as a flag variable
- if(_MAIN_==0) // equivalent to #ifndef _MAIN_
- {
- _MAIN_=1; // equivalent to #define _MAIN_
- Insert more content...
- } //Equivalent to #endif
- The purpose is to assign a flag variable so that the compiler only includes this header file once during compilation to avoid multiple inclusion errors.
- */
- /*------Dividing line--------------------------------------------------*/
- /*The following is the content of main.c*/
- /* Note 1:
- Each source file must contain two files, one is the system header file REG52.H of the microcontroller,
- The other one is its own header file main.h. The rest of the header files depend on the actual situation.
- To decide whether to call, which files' functions, global variables or macro definitions we use, we need to call the corresponding header files.
- Each source file only defines functions and variables, but does not declare functions and variables.
- */
- #include "REG52.H" //Must include the microcontroller system header file
- #include "main.h" //Must include its own header file
- /* Note 2:
- (1) Since the initial_myself() and initial_peripheral() functions are called in this source file, and these two functions
- They are all defined and declared in the initial file, so initial.h must also be included.
- (2) Since the delay_long(100) function is called in this source file, and this function
- It is defined and declared in the delay file, so delay.h must also be included.
- (2) Since the led_flicker() function is called in this source file, and this function
- It is defined and declared in the led file, so led.h must also be included.
- */
- #include "initial.h" //Since the initial_myself() and initial_peripheral() functions are used in this source file, initial.h must also be included
- #include "delay.h" //Because the delay_long(100) function is used in this source file, delay.h must also be included
- #include "led.h" //Since the led_flicker() function is used in this source file, led.h must also be included
- void main() //This is the function definition
- {
- initial_myself();
- delay_long(100);
- initial_peripheral();
- while(1)
- {
- led_flicker();
- }
- }
- /*------Dividing line--------------------------------------------------*/
- /*The following is the content of delay.h*/
- #ifndef _DELAY_ //The flag variable _DELAY_ is named after its own file name
- #define _DELAY_ //The flag variable _DELAY_ is named after its own file name
- void delay_long(unsigned int uiDelaylong); //This is the function declaration. Each function in a source file must be declared in its header file.
- #endif
- /*------Dividing line--------------------------------------------------*/
- /*The following is the content of delay.c*/
- #include "REG52.H" //Must include the microcontroller system header file
- #include "delay.h" //Must include its own header file
- void delay_long(unsigned int uiDelayLong) //This is the function definition
- {
- unsigned int i; //This is the definition of a local variable
- unsigned int j; //This is the definition of a local variable
- for(i=0;i
- {
- for(j=0;j<500;j++)
- {
- ;
- }
- }
- }
- /*------Dividing line--------------------------------------------------*/
- /*The following is the content of initial.h*/
- #ifndef _INITIAL_ //The flag variable _INITIAL_ is named after its own file name
- #define _INITIAL_ //The flag variable _INITIAL_ is named after its own file name
- void initial_myself(); //This is a function declaration. Each function in a source file must be declared in its header file.
- void initial_peripheral(); //This is a function declaration. Each function in a source file must be declared in its header file.
- #endif
- /*------Dividing line--------------------------------------------------*/
- /*The following is the content of initial.c*/
- #include "REG52.H" //Must include the microcontroller system header file
- #include "initial.h" //Must include its own header file
- /* Note 1:
- Since the led_dr statement is used in this source file, and led_dr is a macro definition in the led file, led.h must also be included.
- */
- #include "led.h" //Since the led_dr statement is used in this source file, led.h must also be included
- void initial_myself() //This is the function definition
- {
- TMOD=0x01; //The following can directly use the register keywords TMOD, TH0, TL0, EA, ET0, TR0 because the REG52.H header file is included
- TH0=0xf8;
- TL0=0x2f;
- led_dr=0; //led_dr is defined and declared in the led file
- }
- void initial_peripheral() //This is the function definition
- {
- EA=1;
- ET0=1;
- TR0=1;
- }
- /*------Dividing line--------------------------------------------------*/
- /*The following is the content of interrupt.h*/
- #ifndef _INTERRUPT_ //The flag variable _INTERRUPT_ is named after its own file name
- #define _INTERRUPT_ //The flag variable _INTERRUPT_ is named after its own file name
- void T0_time(); //This is a function declaration. Each function in a source file must be declared in its header file.
- /* Note 1:
- To declare an external global variable, you must add the extern keyword. At the same time, you must not assign an initial value when declaring a global variable, for example:
- extern unsigned int uiTimeCnt=0; This is absolutely wrong.
- */
- extern unsigned int uiTimeCnt; //This is a global variable declaration, and cannot be assigned an initial value
- #endif
- /*------Dividing line--------------------------------------------------*/
- /*The following is the content of interrupt.c*/
- #include "REG52.H" //Must include the microcontroller system header file
- #include "interrupt.h" //Must include its own header file
- unsigned int uiTimeCnt=0; //This is the definition of a global variable, which can be assigned an initial value
- void T0_time() interrupt 1 //This is the function definition
- {
- TF0=0; //The following can directly use the register keywords TF0, TR0, TH0, TL0 because the REG52.H header file is included
- TR0=0;
- if(uiTimeCnt<0xffff)
- {
- uiTimeCnt++;
- }
- TH0=0xf8;
- TL0=0x2f;
- TR0=1;
- }
- /*------Dividing line--------------------------------------------------*/
- /*The following is the content of led.h*/
- #ifndef _LED_ //The flag variable _LED_ is named after its own file name
- #define _LED_ //The flag variable _LED_ is named after its own file name
- #define const_time_level 200 //Macro definitions are placed in header files
- /* Note 1:
- The macro definition of the IO port is also placed in the header file.
- If it is a PIC microcontroller, the following IO port definition is equivalent to the macro definition #define led_dr LATBbits.LATB4 and other statements
- */
- sbit led_dr=P3^5; //If it is a PIC microcontroller, it is equivalent to the macro definition #define led_dr LATBbits.LATB4 and other statements
- void led_flicker(); //This is the function declaration. Each function in a source file must be declared in its header file.
- /* Comment 3:
- When declaring a global variable, you must add the extern keyword. At the same time, you must not assign an initial value when declaring a global variable, for example:
- extern unsigned char ucLedStep=0; This is absolutely wrong.
- */
- extern unsigned char ucLedStep; //This is the declaration of a global variable
- #endif
- /*------Dividing line--------------------------------------------------*/
- /*The following is the content of led.c*/
- #include "REG52.H" //Must include the microcontroller system header file
- #include "led.h" //Must include its own header file
- /* Note 1:
- Since the uiTimeCnt global variable is used in this source file, and uiTimeCnt is declared and defined in the interrupt file,
- So interrupt.h must also be included
- */
- #include "interrupt.h" //Must include its own header file
- unsigned char ucLedStep=0; //This is the definition of a global variable, which can be assigned an initial value
- void led_flicker() //This is the function definition
- {
- switch(ucLedStep)
- {
- case 0:
- if(uiTimeCnt>=const_time_level)
- {
- ET0=0; //The following can directly use the ET0 register keyword because the REG52.H header file is included
- uiTimeCnt=0; //The uiTimeCnt variable is declared and defined in the interrupt file, so interrupt.h must also be included
- ET0=1;
- led_dr=1; //This IO port definition has been defined in the led.h header file
- ucLedStep=1; //Switch to the next step
- }
- break;
- case 1:
- if(uiTimeCnt>=const_time_level)
- {
- ET0=0;
- uiTimeCnt=0;
- ET0=1;
- led_dr=0;
- ucLedStep=0; //Return to the previous step
- }
- break;
- }
- }
- /*------Dividing line--------------------------------------------------*/
Closing remarks:
The next section will start to talk about LCD display. For more details, please listen to the next analysis - commonly used dot matrix font program with 12864 LCD screen font library.
Previous article:Section 67: Using external interrupts to simulate serial port data transmission and reception
Next article:Section 69: Using the static keyword can reduce the use of global variables
- Popular Resources
- Popular amplifiers
 TLC2652ACJG
TLC2652ACJG
Recommended Content





Latest Microcontroller Articles
- Learn ARM development(16)
- Learn ARM development(17)
- Learn ARM development(18)
- Embedded system debugging simulation tool
- A small question that has been bothering me recently has finally been solved~~
- Learn ARM development (1)
- Learn ARM development (2)
- Learn ARM development (4)
- Learn ARM development (6)
He Limin Column
Microcontroller and Embedded Systems Bible
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
MoreSelected Circuit Diagrams






MorePopular Articles
- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
MoreDaily News
- Pickering Launches New Future-Proof PXIe Single-Slot Controller for High-Performance Test and Measurement Applications
- Apple faces class action lawsuit from 40 million UK iCloud users, faces $27.6 billion in claims
- Apple faces class action lawsuit from 40 million UK iCloud users, faces $27.6 billion in claims
- The US asked TSMC to restrict the export of high-end chips, and the Ministry of Commerce responded
- The US asked TSMC to restrict the export of high-end chips, and the Ministry of Commerce responded
- ASML predicts that its revenue in 2030 will exceed 457 billion yuan! Gross profit margin 56-60%
- Detailed explanation of intelligent car body perception system
- How to solve the problem that the servo drive is not enabled
- Why does the servo drive not power on?
- What point should I connect to when the servo is turned on?
Guess you like
- Microchip Live at 10:00 today: MCU programming is no longer difficult, use MPLAB Code Configurator (MCC) to achieve rapid development
- Application of TMS320DM642 in ATP Technology of Mobile Platform
- [ufun Learning] Unboxing Instructions: What are the preparations before formal learning?
- Raspberry Pi PICO and Firefly Jar
- Today is 520. As boys majoring in science and engineering, how do you surprise your significant other?
- A batch of new Bluetooth speakers are sent for free, and you only need to pay the ten yuan shipping fee
- BearPi HM Nano Introduction
- TI - MCU - MSP430 User Guide
- Class-D amplifier TAS5731M power-on timing analysis
- Award-winning review: Pingtouge RISC-V low-power board - RVB2601






 京公网安备 11010802033920号
京公网安备 11010802033920号