Environmental noise monitoring is an important link for humans to improve their quality of life and strengthen environmental protection. Large-scale environmental noise monitors have been erected on the streets in prosperous neighborhoods and residential areas of major cities. However, most of the current domestic portable noise testers are expensive imported special equipment. Except for those owned by professional environmental protection departments such as health and measurement, they cannot be popularized as civilian products. This article introduces a low-cost, portable digital display environmental noise measuring instrument with 89C51 microcontroller as the core and using V/F conversion technology. The instrument works stably and has good performance. After calibration and calibration, it can meet the needs of general civilians. It can be widely used in industrial and mining enterprises, government agencies, schools and other occasions where environmental noise needs to be measured and controlled.
2. Measurement mechanism of sound pressure level.
The hearing threshold of the human ear is generally 20 μPa, and the pain threshold is generally 200 Pa. The difference is 107 times. Such a wide sound pressure range is difficult to measure, and the human ear has a very special ability to distinguish the relative changes in sound pressure. linear characteristics. Therefore, sound pressure level Lp is commonly used in acoustics to reflect changes in sound pressure, and the sound pressure level of sound pressure p is expressed as
Lp=20 lg (p/p0) (dB) (attached)
Among them: the reference quantity p0 is 20μPa. When p=p0, Lp=0 dB, and when p=200 Pa, Lp=140 dB.
The sound pressure level can be measured with a sound level meter, and the true sound pressure level or average sound pressure level can be obtained by inputting 1 kHz pure tone for 0.2 s to 0.25 s or more than 0.5 s. Taking into account the human ear's perception of loudness at different frequencies, in noise measurement, the inverse curve of the 40phon equal loudness curve is often used to weight the sound pressure level. That is, the A sound level is measured using the A weighting network and written as dB (A ). The attached table gives the relationship between the center frequency of the octave band and the correction amount of the A sound level:

3 Hardware circuit composition
The hardware structure principle of the environmental noise measuring instrument is shown in Figure 1:

Figure 1 Hardware schematic diagram
Environmental noise is converted into electrical signals by high-sensitivity, non-directional electret microphones. The frequency characteristics of the microphone used have non-uniformity of less than 1.5 dB in the range of 50 to 14 000 Hz. It can be used for outdoor measurements after adding a windproof cover and a rainproof cover. The three-stage amplification circuit is composed of an operational amplifier LM324. Carefully adjusting the relevant peripheral component parameters can make its amplitude-frequency characteristics similar to the A-weighted curve. D1, C1, and R1 form a peak detection network, and its output DC level reflects the noise sound pressure.
The voltage/frequency conversion circuit is composed of LM331, and the output frequency signal becomes a TTL level and is sent to the P3.4 pin of the microcontroller as a counting pulse of T0. The conversion circuit has good linearity and strong anti-interference ability. The output frequency range is above 10 ~ 10 000 Hz. Its change ratio reaches 103, which is better than the ordinary 8-bit parallel A/D converter and helps to improve the measurement range of the system. In Figure 1, Rs can be used to adjust the gain deviation and change the output frequency.
The core part of the system is the AT89C51 microcontroller, whose command system is fully compatible with MCS-51 and has a 4kB E2PROM on the chip, which can easily form a minimum measurement system. Its P3.5 pin is connected to the 100 kHz square wave output by the timer composed of NE555, and the T0 timing count is controlled through the T1 interrupt. The counting pulse frequency input from the T0 terminal also reflects the measured sound pressure. After software processing, the noise sound pressure level display value is output from the P1 port, decoded by 74LS248 and then driven to display the two-digit 1.8 in high-brightness LED digital tube. The decoder's light-off end is appropriately controlled to make the two digital tubes glow in turn. Realize dynamic display and reduce power consumption.
4 Software design
The software of the environmental noise measurement system adopts a modular design and consists of a main program, an interrupt service program, a table lookup subprogram and a display subprogram. The flow chart of each program module is shown in Figure 2:
The main program is in a cyclic working state, mainly completing the initialization of the timer/counter and interrupt system, and cyclically calling table lookup and display subroutines. Whenever T1 counts the external 100 kHz clock for 0.5 s, it applies for an interrupt. After responding to the interrupt, the CPU reads the count values in the TH0 and TL0 registers and re-initializes T0 and T1 in order to detect the next data.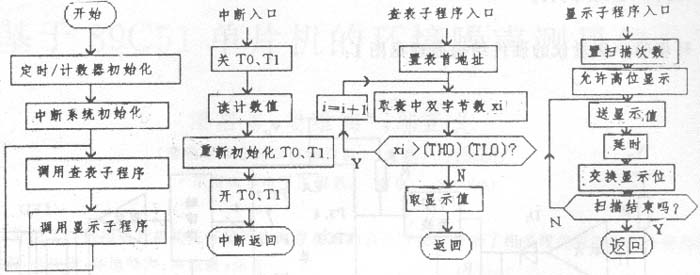
Software flow chart
It is worth pointing out that the table lookup programRealizes the conversion of counting value to sound pressure level. From equation (1), we know that for every 12.2% increase in sound pressure, the sound pressure level increases by 1dB. Therefore, for every 12.2% increase in the T0 count value, the sound pressure level increases by 1dB. Define a table in E2PROM, each three bytes is a set of data, the first two bytes are the count value, and the last byte is the sound pressure level value represented by the compressed BCD code. During debugging, refer to the precision sound level meter and read the count value corresponding to a certain sound pressure level to determine the corresponding relationship between the two parameters in the table. After the program is solidified, it can also be adjusted through the hardware circuit. The pseudo-instruction format that defines the table is given below:
TAB: DB1BH, 0A0H, 0BBH, ; table upper limit:
05H, 83H, 83H,
04H, 0EAH, 82H,
04H, 61H, 81H,
03H, 0E7H, 80H,
03H, 7AH, 79H
03H, 19H, 78H,
02H, 0C3H, 77H,
02H, 76H, 76H,
∶
00H, 00H, 0AAH, ; table lower limit
Among them, the two data "0AAH" and "0BBH" are displayed respectively after decoding.The lower limit mark "[" and the upper limit mark "]" indicate that the measurement range is exceeded.
In order to improve the anti-interference ability of the system, in addition to taking corresponding measures on the hardware, a redundant design method is adopted on the software, that is, repeating important instructions and setting no-operation instructions in unused space to prevent the program from jumping and crashing.
5 Conclusion
Finally, the ND-2 precision sound level meter produced by the state-owned Jiangxi Hongsheng Equipment Factory was used to calibrate the system. The measurement error is less than 1 dB, and the measurement range is between 40 and 96 dB, which is sufficient for the measurement of noise in general environments. Require.
During the instrument production process, senior engineer Wang Yixin from the Physics Department of Changshu College gave a lot of guidance. The Occupational Health Department of Changshu Health and Epidemic Prevention Station provided the calibration instrument. I would like to express my deep gratitude!
References
[1] Ma Dayou et al. Handbook of Acoustics. [M]Beijing: Science Press, 1983
[2] He Limin. Microcontroller Application Collection (1). [M]Beijing University of Aeronautics and Astronautics Press. 1991
[3] Zhou Zecun. Detection Technology. [M]Beijing: Machinery Industry Press. 1993
[4] Yang Zhenjiang. A/D, D/A converter interface technology and practical circuits. [M]Xidian University Press. 1996
[5] Cai Meiqin et al. MCS-51 series single chip microcomputer system and its application. [M]Beijing: Higher Education Press. 1992
Previous article:USB printer driver design for 80C51 and CH375
Next article:Environmental noise measuring instrument based on 89C51 microcontroller
Recommended ReadingLatest update time:2024-11-16 16:48

- Popular Resources
- Popular amplifiers
-
 西门子S7-12001500 PLC SCL语言编程从入门到精通 (北岛李工)
西门子S7-12001500 PLC SCL语言编程从入门到精通 (北岛李工) - Siemens Motion Control Technology and Engineering Applications (Tongxue, edited by Wu Xiaojun)
-
 How to read electrical control circuit diagrams (Classic best-selling books on electronics and electrical engineering) (Zheng Fengyi)
How to read electrical control circuit diagrams (Classic best-selling books on electronics and electrical engineering) (Zheng Fengyi) - MCU C language programming and Proteus simulation technology (Xu Aijun)
 西门子S7-12001500 PLC SCL语言编程从入门到精通 (北岛李工)
西门子S7-12001500 PLC SCL语言编程从入门到精通 (北岛李工) How to read electrical control circuit diagrams (Classic best-selling books on electronics and electrical engineering) (Zheng Fengyi)
How to read electrical control circuit diagrams (Classic best-selling books on electronics and electrical engineering) (Zheng Fengyi)




 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- How to get started with Renesas MCU?
- Shanghai ACM32F070 Development Board Review 1. Unboxing
- Strange crash problem of STM32G series timer TIM7!
- Watch the video to win a JD card | Taixiang's actual test of Shui Ge's secrets [Second issue]
- How to choose MCU in applications running at high temperature
- EEWORLD University Hall ---- 2019UDE on-site report: Appotronics leads laser display to a new peak
- SK Hynix only pays 17 months' salary as year-end bonus, sparking employee dissatisfaction
- Microcontroller Program Outsourcing: Urgently need help to write an MCU to control the RF chip to send and receive
- Apply for ADI smoke detection module for free, design smoke detectors more reasonably, and save lives more effectively.
- ROHM R Classroom: Power supply design technical information is continuously updated. Click to download






 京公网安备 11010802033920号
京公网安备 11010802033920号