Have you ever played a racing game on a TV where the controller vibrates to warn you when you go off the track? If so, you have already had a sense of what a haptic interface is. The word haptic comes from the Greek word haptikos, which means to grasp or sense. With haptic robotics, users can feel a distant or virtual environment. Haptic interfaces give users real tactile feedback, allowing users to feel things that they are not directly touching. For example, a haptic interface allows you to feel the resistance of a simulated flight steering wheel, and the tactile feedback allows the pilot to know how much force to apply.
One of the most cutting-edge areas of tactile research is called "passive tactile." General tactile interfaces are active, meaning that the system uses power devices such as motors and wind to increase the system force perceived by the user. The risk of active tactile systems is that the power devices may increase the force too much and injure the user. Passive tactile interface designs have safety options, using passive power devices such as magnetorheological brakes to eliminate system forces instead of adding forces to the system. Passive tactile interfaces are not only safe, but also more energy-efficient.
Researchers at the Intelligent Machine Dynamics Laboratory (IMDL) at Georgia Institute of Technology are investigating the use of passive haptic systems. Dr. Wayne Book and graduate student Benjamin Black are investigating whether passive haptic systems can provide the same benefits as active haptic systems for remote device operation, with the added benefit of additional safety features. A major limitation of passive haptic systems is that the devices cannot be fixed in place. Also, in contrast to active haptic systems, passive powered devices must guide the operator to the desired location. Dr. Book and Black are attempting to overcome this difficulty by developing advanced passive powered device control schemes.
Using a graphical system design approach
Using the graphical system design approach, system design was divided into several steps. Graphical system design introduces graphical development software tools and off-the-shelf hardware to speed up the design, modeling and configuration of embedded control devices. The researchers used the National Instruments LabVIEW graphical software development platform to design and simulate tactile control systems and remote operation communications. The designed products were configured to a real-time PXI control and data acquisition system to test the solutions. The advantage of this testing method is that Dr. Book and Black can avoid spending energy on low-end embedded software development and customized hardware design when configuring the product, and instead devote themselves to repeated trials and designs.

Researchers can quickly import their master-slave controller algorithms into LabVIEW and then use high-level programming interfaces to load dynamic devices and sensors. By loading the algorithms with actual hardware, they can verify the correctness of the theory with real data. Figure 1 shows the graphical source code of the researcher operating the slave controller position. In addition, the software tool provides high-level acquisition interfaces, such as the timed-loop function. The timed-loop is a LabVIEW program structure that can collect priority and multithreading details. Through these different types of acquisition methods, engineers and scientists can easily apply multithreading functions to their software. This gives researchers more time to perfect the designed product instead of spending time on low-level code development.
Hardware design and configuration
The researchers configured software algorithms to PXI modular hardware systems. These systems include deterministic, real-time controllers and appropriate I/O modules that can contact the sensors of the experimental tactile devices. Using the LabVIEW Real-Time Module, the researchers configured their algorithms to the PXI controllers for headless operation. They used plug-and-play motion control modules to handle linear slave motors and multifunction data acquisition devices to handle fixed-point sensors.
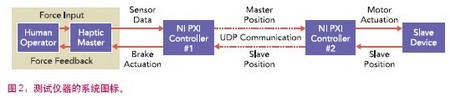
The test instrumentation for this study used a 2-DOF manipulator as the master to control a 1-DOF linear motor as the slave. There was no physical connection between the master and slave; instead, a PIX real-time control system was connected to the master and another system was connected to the slave, as shown in Figure 2. PIX system 1 used a deterministic application on NI LabVIEW to read out the gamma sensor and the optical encoder on the master manipulator. The researchers used this data to determine the master's position and communicated the position to PXI system 2.
PXI system 2 uses the master position as a fixed point to output signals to a 4KHz PD (proportional differential) controller designed in LabVIEW to run the linear motor and read position data on the optical encoder. The slave is constrained by the physical structure and its movement is blocked. The slave position is transmitted back to the master via UDP to PXI system 1, which loads the data into the control algorithm that determines the tactile force that should be applied to the user to make them feel the presence of the physical constraint. The force is driven by the magnetorheological actuator. The purpose of the system is to have the slave position track the master position.
Dr. Book and Black are now conducting simulation experiments and further research using dynamic systems based on LabVIEW. Using system identification techniques, the researchers can use the actual data collected in simulation and feedback experiments to build a digital simulation structure of the dynamics between the master and slave devices. They use the result inequality combined with the LabVIEW simulation module to calculate the real-time formula that simulates the feedback between different control laws. This simulation process helps them to verify the laws more quickly and repeatedly before actually applying them to the production of tactile devices.
Summarize
This research story once again illustrates how current technological advances can pave the way for future technologies. Using a graphical systems design approach, Dr. Book and Black took advantage of the democratization of embedded development to achieve groundbreaking research.
Previous article:Design of Multi-channel High-speed Data Acquisition System Based on LABVIEW
Next article:Application of MACS in APMP Alkaline Hydrogen Peroxide Mechanical Pulp Project
- Popular Resources
- Popular amplifiers
-
 Semantic Segmentation for Autonomous Driving: Model Evaluation, Dataset Generation, Viewpoint Comparison, and Real-time Performance
Semantic Segmentation for Autonomous Driving: Model Evaluation, Dataset Generation, Viewpoint Comparison, and Real-time Performance - Machine Learning and Embedded Computing in Advanced Driver Assistance Systems (ADAS)
-
 CVPR 2023 Paper Summary: Adversarial Attack and Defense
CVPR 2023 Paper Summary: Adversarial Attack and Defense - Intelligent program synthesis framework and key scientific problems for embedded software
 Semantic Segmentation for Autonomous Driving: Model Evaluation, Dataset Generation, Viewpoint Comparison, and Real-time Performance
Semantic Segmentation for Autonomous Driving: Model Evaluation, Dataset Generation, Viewpoint Comparison, and Real-time Performance CVPR 2023 Paper Summary: Adversarial Attack and Defense
CVPR 2023 Paper Summary: Adversarial Attack and Defense




- Molex leverages SAP solutions to drive smart supply chain collaboration
- Pickering Launches New Future-Proof PXIe Single-Slot Controller for High-Performance Test and Measurement Applications
- CGD and Qorvo to jointly revolutionize motor control solutions
- Advanced gameplay, Harting takes your PCB board connection to a new level!
- Nidec Intelligent Motion is the first to launch an electric clutch ECU for two-wheeled vehicles
- Bosch and Tsinghua University renew cooperation agreement on artificial intelligence research to jointly promote the development of artificial intelligence in the industrial field
- GigaDevice unveils new MCU products, deeply unlocking industrial application scenarios with diversified products and solutions
- Advantech: Investing in Edge AI Innovation to Drive an Intelligent Future
- CGD and QORVO will revolutionize motor control solutions






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- Regarding the relationship between BlueNRG-1 ADC sampling and battery power
- C6000 Timer Application (Part 2)
- Common options for optimizing compilation of TMS320C66x
- [Rawpixel RVB2601 Creative Application Development] 7 Random Letters Falling Effect
- Evaluation Weekly Report 20220523: National Technology's low-power series N32L43x is online, and the last two days of RISC-V Linux Starlight Board
- What effects do different packages have on chip resistors and capacitors?
- [Free White Paper Download] Schneider Electric helps Sunny Optical to provide 24/7 uninterrupted power supply
- A 17-year-old boy dropped out of elementary school after three years of school and was sentenced to four years in prison for attacking an airline company's system! He claimed that his girlfriend was pregnant during the epidemic and he was under great pressure
- Peking University and Huazhong University established chip academy
- How to generate a trapezoidal waveform using TINA-TI?






 京公网安备 11010802033920号
京公网安备 11010802033920号