0 Introduction
In recent years, road traffic volume has increased dramatically, and urban road problems have become one of the important issues that modern cities urgently need to solve. Reasonable control strategies can improve the traffic capacity of intersections. For some intersections with small traffic volumes but large random fluctuations, induction control should be used.
Classic induction control adopts the strategy of delaying the time when the car arrives, and sets fixed parameters such as the initial green light time, unit green light extension time, and maximum green light time based on experience. The control strategy is single and it is difficult to adapt to dynamic traffic flow conditions. In order to achieve a relatively ideal control effect, some scholars have conducted in-depth research on the timing of induction control. Zhai Runping et al. have improved the delay strategy by calculating the effective utilization rate of green time to determine whether to switch the phase, which improves the effective utilization rate of the green light, but adds a control parameter and control complexity; Wang Dianhai et al. proposed a time model for variable unit green light delay, which takes into account the arrival rules of traffic flow in urban roads and the psychological characteristics of drivers. It is an improvement over the traditional fixed unit green light delay, but it is not effective in reducing the average delay of vehicles; Shao Feng et al. compared the calculation methods of two unit green light delays and obtained a calculation method for unit green light delay that reduces the average delay of vehicles, but its calculation parameters are too many, the calculation is complex, and the practicality is not strong. The above studies have studied some timing parameters of induction control, but all use fixed cycles and fixed phase sequences. The literature has considered the impact of phase sequence on the traffic capacity of intersections and adopted different phase sequence schemes for different intersections, but did not consider the impact of traffic flow changes at intersections on the phase sequence; Shen Guojiang et al. proposed a traffic flow model, which used fuzzy reasoning to optimize the phase conversion time and phase sequence selection according to the changes in queue length. Due to the use of an eight-phase scheme, the algorithm complexity is high, there are many adjustment parameters, the real-time performance and reliability cannot be guaranteed, and the green light loss time is increased; Fan Xiaoping et al. combined the advantages of fuzzy control and neural network control to realize multi-phase and variable phase sequence traffic flow control at intersections, but this method has relatively high configuration requirements for the signal system and is difficult to promote and apply.
This paper studies the signal timing in traffic induction control, proposes a multi-phase induction control algorithm with dynamic phase sequence, analyzes the impact of initial green light time, unit green light extension time, minimum and maximum green light time on induction control, and gives a calculation method for the above parameter timing. The algorithm proposed in this paper is simple and practical, with low computational complexity and low requirements for system configuration. Simulation results show that the method proposed in this paper reduces the average delay of the intersection compared with the classical induction control method, and is an effective and feasible method.
1 Overview of induction control principle
Inductive control is a real-time control method that dynamically adjusts the timing of each phase to adapt to traffic changes based on the arrival of vehicles detected by vehicle detectors. It is a typical feedback control process and is suitable for intersection control with small but large traffic flow fluctuations.
Traditional inductive control methods can be divided into semi-inductive control and full-inductive control. In semi-inductive control, detectors are only installed on secondary roads, and the main roads maintain the green light state. When the secondary roads detect that a vehicle has arrived and the minimum green time of the main road has ended, the signal phase is changed; while in full-inductive control, the main and secondary roads cannot be clearly distinguished, and detectors are installed on all entrance roads of the intersection. Its working method is: when a certain signal phase starts to turn on the green light, an "initial green light time" is preset. When the initial green light time ends, a preset time interval is added (generally a unit green light extension time). During this time interval, if no subsequent vehicles arrive, the phase is changed immediately; if the detector detects that a subsequent vehicle has arrived, each time a vehicle is detected, the phase green light is extended by a preset "unit green light extension time" from the moment the vehicle is detected. The green light can be extended to a preset "maximum green light time". When the phase green light time is extended to the maximum value, the phase is forced to switch.
The three basic parameters of induction signal control are: minimum green light time, unit green light extension time, and maximum green light time. The location of the detector and the selection of phase sequence also have an important influence on the control effect of induction control.
2 Timing calculation method of main parameters of induction control
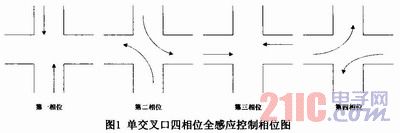
This paper mainly studies the four-phase full-sensing control method of a single intersection. In order to achieve a better control effect, the main parameters of the induction control must be reasonably timed, as shown in Figure 1. The arrows in the figure indicate the direction of traffic allowed to pass in this phase, and all right-turning vehicles are allowed to pass freely. Considering the dynamic changes of traffic flow, a dynamic phase sequence control algorithm is designed, and the calculation method for the initial green light time, green light extension time, minimum and maximum green light time is given.
2.1 Initial green light time G0
Classic induction control usually adopts a fixed initial green light time. In order to improve the traffic capacity of the intersection, this paper adopts a variable initial green light time method, that is, at the moment of obtaining the right of way in the i-th phase, the length of the vehicle queue Qi between the detector and the stop line is detected. The initial green light time is the time required for all Qi vehicles to leave the stop line, which is:
![]()
Among them, Qi is the number of vehicles queued between the detector and the stop line on the key entrance road at the moment when the i phase obtains the right of way, and the unit is vehicles; Si is the saturated flow rate on the key entrance road of the i phase, and the unit is vehicles/hour;
2.2 Extension of green light time for units
The unit green light extension time of each phase should ensure that the vehicle can travel the distance from the detector to the stop line when driving at the speed of the entrance lane, and ensure that the vehicle can pass the stop line smoothly within the delay time, that is, meet the following requirements:
![]()
Where Di is the distance between the detector and the stop line on the critical entrance road of phase i, m; Vi is the average speed of the traffic flow on the critical entrance road of phase i, m/s;
2.3 Minimum green light time
The minimum green light time is the green light time that must be guaranteed when the signal phase obtains the right of way. It is equal to the sum of the initial green light time and the unit green light delay. The minimum green light time is:
![]()
Where: Gi0 is the initial green light time of phase i, s; △i is the unit green light interval time of phase i, s.
2.4 Maximum green light time Gmax
The maximum green light time is the phase green light time determined to maintain the best green-to-signal ratio. It is the extension limit of the phase green light time. When the maximum green light time is reached, the green light is forced to end and the phase is changed. The maximum green light time is generally set to 30-60s and can be set based on experience.
3 Layout of the detector
This paper adopts the method of burying a pair of detectors in all entrance lanes to detect the arrival of vehicles and the length of the queue in each lane, as shown in Figure 2. One set of detectors is set at the position just crossing the stop line, and the other set of detectors is set at a distance Di below the stop line. The setting position of Di should ensure that the length of the queue of vehicles does not exceed the detector at the minimum flow rate, and the maximum number of queued vehicles between the detector and the stop line can be evacuated within the initial green light time. Therefore, the distance Di between the detector and the stop line should satisfy:
![]()
Where: hi is the average headway distance between vehicles in the queue at phase i, m; Qi is the maximum number of vehicles in the queue between the detector and the stop line on the critical entrance lane at phase i, vehicles.

4 Multi-phase induction control algorithm with variable phase sequence
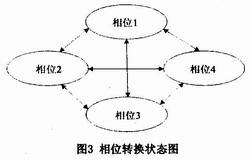
In order to effectively reduce the average vehicle delay, this paper proposes a variable phase sequence induction control algorithm for the four-phase full-induction control of a single intersection mentioned above. A priority value Wi is determined according to the queue length and average waiting time of each phase, Wi=QiTi; where Qi is the queue length of vehicles waiting in the i-th phase, and T is the waiting time of the i-th phase; obviously, the phase with a larger priority value has priority, and the phase is changed flexibly and dynamically by judging the priority value. The phase sequence of this timing scheme is not fixed. The state diagram of the phase conversion is shown in Figure 3, and the phase is changed in real time according to traffic demand.
The specific algorithm is as follows:
Step 1: Initialize and give the vehicle queue length of any phase to the phase with the longest queue length.
Step 2: Give the phase that obtains the right of way an initial green light time;
Step 3: Extend the time of the green light by one unit in this phase.
Step 4 detects whether there is a car arriving in this phase. If there is no car, go to Step 5. If there is a car, determine whether the green light time of this phase reaches the maximum green light time. If yes, go to Step 5. If no, go to Step 3.
Step 5 Calculate the priority value of each red light phase, give the right of way to the phase with the highest priority value, and go to Step 2;
5 Simulation result analysis
In order to verify the effectiveness of the algorithm proposed in this paper, a comparative experiment was conducted on the simulation platform between the classic induction control algorithm and the dynamic phase sequence induction control algorithm proposed in this paper. The simulation software used was the microscopic traffic simulation software - USTCMTS1.0 system. Because induction control is only applicable to traffic flow conditions with low saturation, the experiment was conducted under the condition of saturation lower than 0.6. The width of the intersection selected for the simulation was: the road width in the east-west direction and the north-south direction was 10.5m. The simulation ran for 6000s. Taking the average delay of vehicles as the standard, the average delay of the two algorithms was obtained. Figure 4 is a graph drawn using MATLAB based on the simulation results.

From the simulation results, we can see that the average delay of the dynamic phase sequence induction control proposed in this paper is significantly lower than the average delay of the classical induction control.
6 Conclusion
This paper takes the induction control of a single intersection as the research background. Aiming at the shortcomings of the classic induction control algorithm with fixed phase sequence and fixed timing parameters, a multi-phase induction control algorithm with variable phase sequence and dynamic initial green light time is proposed. The simulation results show that the improved induction control algorithm effectively reduces the average delay of vehicles compared with the classic induction control algorithm and can adapt to dynamic traffic flow conditions.
Previous article:Intelligent automated production line process management based on RFID
Next article:Design of Multi-channel High-speed Data Acquisition System Based on LABVIEW
- Popular Resources
- Popular amplifiers
 Signal Integrity and Power Integrity Analysis (Eric Bogatin)
Signal Integrity and Power Integrity Analysis (Eric Bogatin)




- Molex leverages SAP solutions to drive smart supply chain collaboration
- Pickering Launches New Future-Proof PXIe Single-Slot Controller for High-Performance Test and Measurement Applications
- CGD and Qorvo to jointly revolutionize motor control solutions
- Advanced gameplay, Harting takes your PCB board connection to a new level!
- Nidec Intelligent Motion is the first to launch an electric clutch ECU for two-wheeled vehicles
- Bosch and Tsinghua University renew cooperation agreement on artificial intelligence research to jointly promote the development of artificial intelligence in the industrial field
- GigaDevice unveils new MCU products, deeply unlocking industrial application scenarios with diversified products and solutions
- Advantech: Investing in Edge AI Innovation to Drive an Intelligent Future
- CGD and QORVO will revolutionize motor control solutions






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- ARM CORTEX-M3 core architecture understanding summary
- Introduction to TI's three-phase Vienna PFC solution
- FPGA PLL Loss of Lock
- After a period of dormancy, life will usher in a new world
- PCB 3D component library
- How to configure the timer?
- Digitally controlled DCDC converter
- How to deal with the prompt "Transient time point calculation did not converge" during Multisim simulation
- What are the configurations of the computer that ranks fourth in the world?
- Hahaha






 京公网安备 11010802033920号
京公网安备 11010802033920号