1. Overview
The brushless DC motor is composed of a motor body and a driver, and is a typical mechatronics product. The stator winding of the motor is mostly made into a three-phase symmetrical star connection, which is very similar to a three-phase asynchronous motor. The rotor of the motor is attached with a magnetized permanent magnet. In order to detect the polarity of the motor rotor, a position sensor is installed in the motor. The driver is composed of power electronic devices and integrated circuits, etc. Its functions are: receiving the start, stop, and brake signals of the motor to control the start, stop, and brake of the motor; receiving the position sensor signal and the forward and reverse signals to control the on and off of each power tube of the inverter bridge to generate continuous torque; receiving the speed command and speed feedback signal to control and adjust the speed; providing protection and display, etc.
Permanent Magnet Brushless DC Motor (hereinafter referred to as PMBLDC) is widely used in household consumer products (air conditioners, refrigerators, washing machines) and IT peripheral products (printers, floppy drives, hard drives) due to its inherent characteristics. The performance of permanent magnet brushless DC motor depends not only on the design of the motor itself, but also on the drive technology and the drive board that implements this drive technology. The driver board of permanent magnet brushless DC motor is also a bridge connecting the upper control MCU and the power electronic converter: it receives the command of the upper computer and achieves the predetermined control target through a certain control method; at the same time, it returns the current motor state and some basic parameters to the upper control MCU. From the above functions that the PMBLDC driver board should achieve, it can be seen that the core device of this type of driver board should be an embedded microcontroller with multiple (more than 6) PWM outputs. Since the application of INTEL MCS-51 series microcontrollers in China has a broad foundation, we selected the Infineon C504 embedded microcontroller that fully adopts the 8031 core and has a maximum clock frequency of 40MHz.
2. Hardware driver mode of C504
C504, in addition to adding peripheral interface function circuits such as A/D conversion, also adds a 7-way all-digital PWM output unit CCU (Capture/Compare Unit) that is very suitable for motor control. The functional block diagram of CCU is shown in Figure 1. When C504 works in hardware drive mode, cout3 can modulate cc0, cout0, cc1, cout1, cc2, cout2, and its output timing is controlled by INT0, INT1, INT2 coding.

In Figure 1, fosc/2 on the left is the time base for the entire unit to operate;
The CTRAP terminal can control the state of the cc0-cout2 output terminals. When in the CTRAP state, the state of cc0~cout2 can be defined by software;
The cc0-cout2 terminals are 3-phase 6-channel 16-bit PWM outputs;
ccx and coutx (x=1,1,2) are complementary signals, and their dead time can be controlled by setting the value of Offset RegiSTer;
cout3 is a single 10-bit PWM output terminal, while INT0~INT2 are externally controlled. The output order of cc0~cout2 is controlled by the encoding of INT0~INT2.
Figure 2 shows the current waveform of C504 when it is used in an outer rotor permanent magnet brushless DC motor as the drive motor of an electric bicycle working in hardware mode.
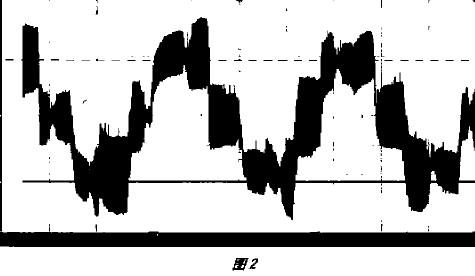
This prototype has now been put into production by Hangzhou Guangyang Electromechanical Technology Co., Ltd. When the permanent magnet brushless DC motor used as an electric vehicle drive is controlled by an embedded microcontroller, a series of functions that cannot be achieved by ordinary analog controllers, such as smooth starting, can be achieved.
3. Software drive mode of C504
In addition to the hardware drive mode, C504 also provides a software drive mode that can arbitrarily combine PWM outputs, as shown in Figure 3.
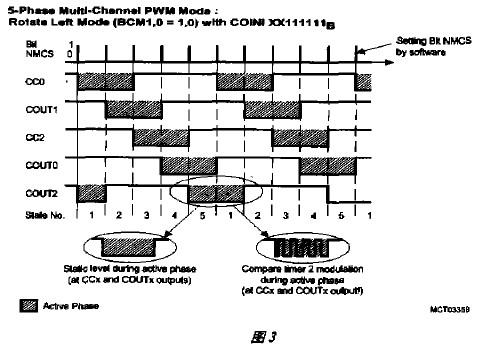
The term "arbitrary combination" has two meanings:
1) The number of phases of the motor can be selected, and different ccx and coutx (x=0, 1, 2) terminals can be used;

IV. Conclusion
The CCU unit of InfinEON's embedded microcontroller C504 has improved functions that are very suitable for PMBLDC motor control. By selecting hardware and software modes, the required control purpose can be easily achieved; and C504 is low-priced and has strong anti-interference performance, making it suitable as a control chip embedded in the middle component between power converters and computers such as driver boards. At present, we use C504 as the underlying embedded control chip of the multi-axis control system and are preparing to apply it to industries such as CNC machinery and printing.
2) The control method can be general PWM or SPWM control, which can be applied to the quasi-sinusoidal current control of PMBLDC.
Figure 4 is the current waveform of a DCDD (DC Direct Drive) washing machine. It can be seen from the figure that the current waveform is very close to a sine wave, achieving a good control effect.
Previous article:Design of Gbps wireless communication base station based on Virtex-5 FPGA
Next article:A brief discussion on embedded real-time systems and their applications in communication systems
 AUTOSAR MCAL Principles and Practice
AUTOSAR MCAL Principles and Practice Cortex Microcontroller Software Interface Standard (CMSIS)
Cortex Microcontroller Software Interface Standard (CMSIS)

- Molex leverages SAP solutions to drive smart supply chain collaboration
- Pickering Launches New Future-Proof PXIe Single-Slot Controller for High-Performance Test and Measurement Applications
- CGD and Qorvo to jointly revolutionize motor control solutions
- Advanced gameplay, Harting takes your PCB board connection to a new level!
- Nidec Intelligent Motion is the first to launch an electric clutch ECU for two-wheeled vehicles
- Bosch and Tsinghua University renew cooperation agreement on artificial intelligence research to jointly promote the development of artificial intelligence in the industrial field
- GigaDevice unveils new MCU products, deeply unlocking industrial application scenarios with diversified products and solutions
- Advantech: Investing in Edge AI Innovation to Drive an Intelligent Future
- CGD and QORVO will revolutionize motor control solutions






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- Practical Circuit Diagrams and Schematic Diagrams of Frequency Converters
- MicroPython driver porting of LIS2MDL magnetic field sensor
- New application technologies in the Internet of Vehicles bring the required buffering to process the collection and transmission of information
- [MM32 eMiniBoard Review] Part 1: Unboxing
- IGBT DC voltage and current stabilizing power supply equipment solution requirements, seeking cooperation
- These tools can help you quickly understand ADI data converter products!
- ADI officially acquired Maxim's old memories
- [Experimental Guide] How to view the number of GPIO added on the FPGA side of the SoC FPGA system
- Looking for a book Yuan Diwen "High Frequency Communication Circuit Design"
- Watch the video, participate in the NXP quiz, and win wonderful gifts!






 京公网安备 11010802033920号
京公网安备 11010802033920号