|
1. Introduction
In recent years, wind speed sensors have been used more and more widely, especially ultra-low speed (V<1m/s) wind speed sensors, which are widely used in aviation, aerospace, meteorology, biomedical dynamics, and many civil industries, service industries, and sports venues. At the same time, the requirements for the measurement range and measurement accuracy of wind speed sensors are getting higher and higher.
At present, many foreign manufacturers have developed wind speed sensors, and their wind speed measurement resolution has reached a high sensitivity of V<0.01m/s, which is equivalent to the sensitivity of the differential pressure sensor reaching △P<0.0025mm water column accuracy. The measurement error can be controlled within 5% of the reading. The rapid development of modern wind speed sensors should be firstly promoted in Denmark. Due to its development system that closely combines research, production and use, it has always been in a leading position in the world. The second is the United States. In recent years, Japan has also caught up quickly and ranked third in the world. However, for half a century, the development and production of wind speed sensors in China have been in a relatively backward state for a long time. Especially for ultra-low wind speeds of V<1m/s, due to the lack of suitable calibration equipment, the accuracy cannot be given and it is still unusable. It cannot be used in fields such as aviation and aerospace that require high precision and high reliability.
 In the past 3 to 4 years, with the development of China's aerospace industry, the Seventh Institute of China Aerospace Science and Technology Corporation and the Beijing Spacecraft General Design Department of China Aerospace Science and Technology Corporation have cooperated to greatly advance China's research and development capabilities of hot-bulb wind speed sensors. The third-generation product it developed, the HB-3 hot-bulb wind speed sensor (Figure 1), can already meet the use requirements of China's manned spacecraft. Compared with similar domestic products, its comprehensive performance has the following advantages.
In the past 3 to 4 years, with the development of China's aerospace industry, the Seventh Institute of China Aerospace Science and Technology Corporation and the Beijing Spacecraft General Design Department of China Aerospace Science and Technology Corporation have cooperated to greatly advance China's research and development capabilities of hot-bulb wind speed sensors. The third-generation product it developed, the HB-3 hot-bulb wind speed sensor (Figure 1), can already meet the use requirements of China's manned spacecraft. Compared with similar domestic products, its comprehensive performance has the following advantages.
(1) It is safe and reliable, prevents short circuits, has strong self-protection capabilities, and meets the first need of space flight.
(2) It implements mechatronic design, combines the power supply circuit and the signal output circuit into one, so it is small in size and weighs only 200 grams, meeting the necessary conditions of light weight and small size for space flight.
(3) The resolution of wind speed measurement is V≤0.001m/s, and the lower limit of wind speed can be extended to V=0.02m/s, or even lower ultra-low wind speed. The measurement error can be controlled within 5% of any reading within the range, that is, it can be accurate to the level of V=0.001m/s, which is equivalent to the accuracy of the differential pressure sensor △P=0.00025mm water column. It can measure the wind speed of the incoming flow in the hemispherical direction (three-dimensional). Except for the wind speed in the three meridian angles of φ=60°, 180°, and 300°, the error is about 10%. The measurement error of the incoming flow wind speed in the other meridian angles of φ=0°~360° and the latitude angle γ=0°~±90° is less than 5% of the reading.
(4) It has passed the identification and acceptance level tests of various mechanical environments that occur during the entire process of the spacecraft from ground launch to orbital flight and return to the ground. The HB-3 wind speed sensor can withstand an overload factor of K = 500g (g-gravitational acceleration), which means that once the spacecraft crashes due to a landing failure, the sensor will remain safe and sound.
(5) It has circuit short-circuit protection, electromagnetic compatibility and other capabilities, and has passed the EMC test for identification and acceptance levels to resist various strong electromagnetic interference.
(6) It is easy to use. The calibration gives a unified calibration formula between the output voltage of each sensor and the wind speed. The difference between each formula is only reflected in the difference in the coefficients and exponents in the formula, and these coefficients and exponents are all given in the calibration. When used on the spacecraft, as long as the output voltage value of each sensor measured by ground telemetry is substituted into the corresponding (numbered) formula, the wind speed value of each area on the spacecraft is immediately given, so it is very convenient to use.
2. Introduction to calibration equipment
In order to calibrate this high-precision, high-performance ultra-low-speed wind speed sensor, the 7th Institute of Aerospace also built two calibration equipment. One is the BIA-C flow field simulation device, which can calibrate the wind speed range of V=0~2m/s. Its sensitivity can show the wind speed of V=0.001m/s. It also has the functions of variable pressure (P=0.01~0.01MPa), variable temperature (T=-20℃~45℃), and variable humidity (RH=30%~100%). The other is a variable density low-speed wind tunnel, which can calibrate the wind speed V=1~30m/s, and the calibration error can still be controlled within 5% of the reading, and the pressure change P=0.1~0.01MPa. The establishment of these two calibration equipments meets the calibration accuracy requirements of the high-precision and high-performance wind speed sensors used on the Shenzhou manned spacecraft, and has played a very important role in promoting the modern development of wind speed sensors in China.
3. Working principle of wind speed sensor
Assume that the heat transferred from the hot wire (or hot ball) to the medium (airflow) per unit time is equal to the work done by the current passing through the hot wire or hot ball per unit time. Then the relationship between thermodynamics, aerodynamics and electricity can be used to establish the parameter equation of the hot wire or hot ball wind speed sensor:

Where: A and B are functions of the hot wire resistance, thermal conductivity and Pr number, which can be calculated theoretically or given during calibration. E is the sensor output voltage, which is a function of the airflow density ρg and the airflow temperature Tg. Sometimes for convenience, the inverse function form of the above formula can be written:

Where A1=0, B1 and n1 can be given by calibration data. In this way, as long as the output voltage of the sensor is known, the wind speed V can be easily calculated using formula (2).
4. Effect of temperature on wind speed
 From equation (1), we know that for a given wind speed value V≠0, the output voltage of the sensor E = f (ρg·Tg). Therefore, as long as we discuss the effect of ρg and Tg on the voltage E, we can know the effect on the wind speed V.
From equation (1), we know that for a given wind speed value V≠0, the output voltage of the sensor E = f (ρg·Tg). Therefore, as long as we discuss the effect of ρg and Tg on the voltage E, we can know the effect on the wind speed V.
From (1), we know
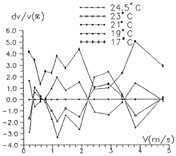
that This effect is reflected in the change of speed. As shown in Figure (2), when △T=7.5℃, >8%.
5. Effect of density on wind speed
From equation (1), we know that

the effect of density on wind speed is often expressed in terms of pressure.


Substituting the state equation into (4), we get:

Figure 3 shows that when the pressure drops from P=0.1Mpa to 0.0275MPa, >80%. It can be seen that the change in pressure has a great impact on the speed.
In addition, the effect of changing the relative humidity of the air (RH=0.3-1.0) on the wind speed was also studied in the calibration. The calibration results show that the effect of humidity can be ignored.
6. Correction of factors affecting wind speed (Tg, Pg)
When the wind speed sensor is used on the spacecraft, its ambient temperature and pressure are different from those during calibration, which will inevitably affect the measured speed V value, so correction must be made.
When the temperature change range is not large, a linear correction can be made to the temperature term (Tw-Tg) in formula (1). Therefore, when formula (5) is applied, it can be derived that: In

the formula, A2, B2 and n2 can be given for each sensor in the calibration, and Rg, Rw, Rgst can be found in the temperature scale, and Pg and Pgst are both known. As long as the output voltage of the sensor is measured, the wind speed value at various locations on the spacecraft can be quickly calculated from formula (7).
7. Conclusion
(i) When V≠0, at △T=7.5℃, the effect of temperature change on the speed measured by the sensor can reach about 8%, so the effect of temperature cannot be ignored.
(ii) The density of the gas is reflected in the pressure change, which has a great impact on the wind speed of the sensor. When the pressure drops from 0.1MPa to 0.0275MPa, the wind speed measured by the sensor drops by more than 80%. (iii)
The change in relative humidity is reflected in the change in gas density. When the relative humidity increases from 30% to 100%, the change in density is less than 1%, so the effect of relative humidity on the accuracy of the wind speed sensor can be ignored.
|
 In the past 3 to 4 years, with the development of China's aerospace industry, the Seventh Institute of China Aerospace Science and Technology Corporation and the Beijing Spacecraft General Design Department of China Aerospace Science and Technology Corporation have cooperated to greatly advance China's research and development capabilities of hot-bulb wind speed sensors. The third-generation product it developed, the HB-3 hot-bulb wind speed sensor (Figure 1), can already meet the use requirements of China's manned spacecraft. Compared with similar domestic products, its comprehensive performance has the following advantages.
In the past 3 to 4 years, with the development of China's aerospace industry, the Seventh Institute of China Aerospace Science and Technology Corporation and the Beijing Spacecraft General Design Department of China Aerospace Science and Technology Corporation have cooperated to greatly advance China's research and development capabilities of hot-bulb wind speed sensors. The third-generation product it developed, the HB-3 hot-bulb wind speed sensor (Figure 1), can already meet the use requirements of China's manned spacecraft. Compared with similar domestic products, its comprehensive performance has the following advantages.


 From equation (1), we know that for a given wind speed value V≠0, the output voltage of the sensor E = f (ρg·Tg). Therefore, as long as we discuss the effect of ρg and Tg on the voltage E, we can know the effect on the wind speed V.
From equation (1), we know that for a given wind speed value V≠0, the output voltage of the sensor E = f (ρg·Tg). Therefore, as long as we discuss the effect of ρg and Tg on the voltage E, we can know the effect on the wind speed V.






 Real-time driver monitoring system via modal and viewpoint analysis
Real-time driver monitoring system via modal and viewpoint analysis Follow me Season 2 Episode 1 All Codes
Follow me Season 2 Episode 1 All Codes











 京公网安备 11010802033920号
京公网安备 11010802033920号