0 Introduction
There are still millions of farmers and herdsmen without electricity supply in the remote western regions of my country, and the region is experiencing increasingly severe drought, desertification, and grassland degradation. The use of photovoltaic water pump systems to rationally develop groundwater resources is of great significance for solving the drinking water and agricultural water use problems in the region and improving the ecological environment. The core of photovoltaic water pump technology is the design of a dedicated inverter. How to design an inverter that matches the solar cell array and has various protection functions unique to the photovoltaic water pump system is the focus of this article.
1 System composition and working principle
1.1 Structural diagram of photovoltaic water pump system
As shown in Figure 1, the system uses a solar cell array to directly convert solar energy into electrical energy. After DC/DC boost and a frequency converter with TMPPT function, it outputs a three-phase AC voltage to drive an AC asynchronous motor and a water pump load to complete the water storage function in the water tower. It mainly includes four parts: a solar cell array; a frequency converter with TMPPT function; a water pump load; and a water storage device.

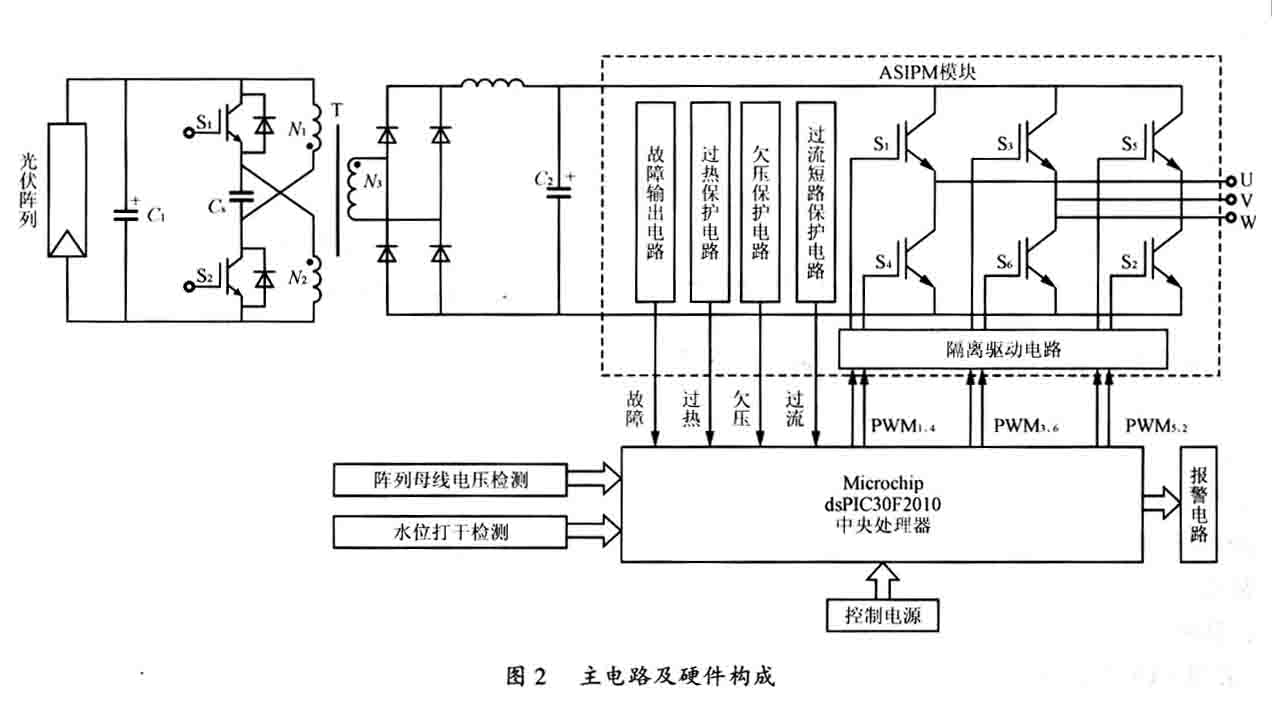
1.2 Inverter main circuit and hardware composition
The main circuit and hardware control block diagram used in this system are shown in Figure 2. The DC/DC part of the main circuit uses a push-pull forward circuit with superior performance for boosting; the DC/AC part uses a three-phase bridge inverter circuit. The main power device uses ASIPM (integrated intelligent power module) PS12036, and the system control core is composed of a 16-bit digital signal controller dsPIC30F2010. The peripheral control circuit includes array bus voltage detection and water level dry detection circuit. The system first works through the initial setting of the working mode and PI parameters, and then the voltage value searched in real time by the MPPT subroutine is used as the given of the inner loop CVT. The working frequency value is obtained through PI adjustment, and the duty cycle of the PWM signal is calculated to realize the true maximum power tracking (TMPPT) of the photovoltaic array, and keep the V/f ratio of the asynchronous motor constant. The system combines MPPT and inverter, and uses the fault detection function of the ASIPM module for detection and protection. It has a simple structure and is easy to control.
1.2.1 Brief description of DC/DC boost circuit
1.2.1.1 Main circuit selection
For small and medium power photovoltaic water pumps, the photovoltaic array voltage is mostly low voltage (24v, 36v, 48V). For the choice of boost main circuit, people generally choose push-pull circuit, because the primary working voltage of the push-pull circuit transformer is the DC input voltage, and the drive does not need isolation, so it is more suitable for occasions with low input voltage. However, the magnetic bias problem is a major unfavorable factor restricting its application. The parameter differences of the power tube and the winding process of the transformer may cause the push-pull circuit to work in an unstable state. Based on many factors, this system adopts a novel push-pull forward circuit. This circuit topology not only overcomes the magnetic bias problem, but also makes closed-loop control easier (second-order system).
1.2.1.2 Simple analysis of push-pull forward circuit
The push-pull forward circuit is shown in Figure 2, which consists of power tubes S1 and S2, capacitor C8 and transformer T. The primary windings N1 and N2 of transformer T have the same number of turns, and the same-name terminals are shown in Figure 2. When S1 and S2 are turned off at the same time, the voltage across capacitor C8 is positive at the bottom and negative at the top, and is equal to the array voltage. When S1 is turned on, S1, N2 and the photovoltaic array form a loop, N2 is positive at the top and negative at the bottom, and C8, N1 and S1 form a loop at the same time, C8 discharges, N1 is positive at the bottom and negative at the top, and the operation at this time is equivalent to the parallel connection of two forward converters. Similarly, when S2 is turned on and S1 is turned off, it is also equivalent to the parallel connection of two forward converters. After theoretical analysis, the push-pull forward circuit is a second-order system, so the closed-loop control is simple, and the output filter inductance and capacitance are greatly reduced.
1.2.2 Brief Introduction of dsPIC30F2010
Microchip Company cleverly added DSP functions to the 16-bit microcontroller, making Microchip's dsPIC30F digital signal controller (DSC) have both the control functions of a microcontroller (MCU) and the computing power and data throughput of a digital signal processor (DSP). Because it has DSP functions and the size and price of a microcontroller, this system uses this chip as the controller. This chip is mainly suitable for motor control, such as brushless DC motors, single-phase and three-phase induction motors, and switched reluctance motors; it is also suitable for uninterruptible power supplies (UPS), inverters, switching power supplies, and power factor correction. The pin diagram of dsPIC30F2010 is shown in Figure 3.

1.2.2.1 Main structure
12KB program memory;
512 Bytes SRAM:
1024 bytes EEPROM;
3 16-bit timers;
4 input capture channels;
2 output compare/standard PWM channels;
6 motor control PWM channels;
Six 10-bit 500ksps S/D converter channels.
2.2.2 Main features
A/D sampling speed is fast and multiple channels can be sampled simultaneously;
6 Independent/Complementary/Center-Aligned/Edge-Aligned PWMs:
2 programmable dead zones;
The 5V power supply can work normally in a noisy environment;
Minimum operating voltage 3V;
A/D sampling and PWM are synchronized.
2 Photovoltaic Pump Maximum Power Point Tracking (MPPT) Design
2.1 Characteristics and shortcomings of conventional constant voltage tracking (CVT)
The CVT method can approximate the maximum power output of solar cells, and the software processing is relatively simple. However, in fact, the sunshine intensity and temperature are constantly changing, especially in the western region. The temperature and sunshine intensity vary greatly at different times of the day, which will cause the maximum power point voltage of the solar cell array to shift, especially the temperature change. In this case, the CVT method cannot track the maximum point well.
2.2 Principle and implementation of TMPPT
In order to overcome the drawbacks of the CVT method, the concept of TMPPT (True Maximum Power Point Tracking) is proposed, which means "true maximum power tracking" control, that is, to ensure that the system always makes the solar cell work at the maximum power point regardless of the sunshine and temperature conditions. Since the inverter adopts constant V/f control, the speed of the water pump motor is proportional to its input voltage. Therefore, adjusting the output voltage of the inverter is equivalent to adjusting the output power of the load motor. Therefore, this system adopts the TMPPT method to make the solar cell work at the maximum power point as much as possible, providing the maximum energy for the load.
From the characteristic curve of the solar cell array (see Figure 4), we can see that

At the maximum power point, dP/dV=0. On the left side of the maximum power point, when dP/dV>0, P tends to increase.
Figure 5 is a TMPPT maximum power point tracking control block diagram. The input command value of the system is 0, and the feedback value is dP/dV. Assuming that the Z3 state is +1, the Usp* command voltage increases. After the CVT link is adjusted, the system's output voltage V tracks the increase of Usp*. The output current I is sampled, and the dP/dV value is obtained through the power calculation link and the power differential link. If dP/dV>0, then Z1 is +1, Z2 is +1, and Z3 is +1, and the Usp* command voltage continues to increase. If dP/dV

3 System protection function design
1) Overcurrent and short-circuit protection function Since the ASIPM lower arm IGBT bus has a sampling resistor in series, the protection function can be achieved by detecting the bus current. When the detected current value exceeds the given value, it is considered to be overcurrent or short circuit. At this time, the lower bridge arm IGBT gate circuit is turned off and a fault signal is output. When the dsPIC detects this signal, it blocks the PWM pulse to further protect the subsequent circuit.
2) Undervoltage protection function ASIPM detects the control power supply voltage of the lower bridge arm. If the power supply voltage is continuously lower than the given voltage by 1OMs, the IGBTs of each phase of the lower bridge arm are turned off and a fault signal is output. During the fault period, the gates of the three-phase IGBTs of the lower bridge arm do not accept external signals.
3) Overheat protection function ASIPM has a built-in thermistor to detect the substrate temperature. The resistance value of the thermistor is directly output, and the dsPIC can complete the overheat protection function by detecting its resistance value.
The above protections utilize the functions of ASIPM itself, without the need for additional circuits, which further simplifies the hardware circuit design. In addition to the above protection functions, the system also has low-frequency, low sunshine, and dry (automatic and manual dry) protection functions that are unique to photovoltaic water pump systems. For pump loads, when the speed is lower than the lower limit, most of the energy provided by the photovoltaic array is converted into loss. Long-term low-speed operation will cause heat and affect the service life of the water pump. Therefore, this system is designed with low-frequency protection. For the water pump, when the liquid level is lower than the water inlet of the water pump, the water pump is in a no-load state. If no measures are taken, long-term operation will damage the lubricating bearings. This system is an outdoor unattended working mode, so in order to increase the detection reliability, the system adopts two identification methods: automatic dry and manual dry. Among them, automatic dry is judged based on the system output power and motor operating frequency; manual dry is achieved by identifying the current water level through the water level sensor. Since the functions of low frequency, low sunshine, and dry are all completed by software, no hardware circuits need to be added, so the system structure is simple.
4 Conclusion
The push-pull forward circuit used in the DC/DC link of this system is superior to the traditional topology in terms of performance and economy, and is very suitable for photovoltaic water pump systems. The latest ASIPM module is used in the DC/AC link to greatly simplify the circuit and improve the reliability of the system. The TMPPT maximum power point tracking control method is used in the control strategy to improve the system efficiency and simplify the system structure. At the same time, the digital signal controller (DSC) dsPIC30F2010 is also used in this system to improve the system speed and improve the system performance. In short, the photovoltaic water pump controller based on the above structure has obvious advantages and market competitiveness in terms of structure, function, cost and reliability.
Previous article:Application of Programmable Analog Devices in Small Signal Measurement Systems
Next article:Design of high-power ultrasonic power supply based on 56F803 DSP
 Modern high-frequency switching power supply technology and its application (Liu Fengjun)
Modern high-frequency switching power supply technology and its application (Liu Fengjun) 開關電源專業英語
開關電源專業英語




- Huawei's Strategic Department Director Gai Gang: The cumulative installed base of open source Euler operating system exceeds 10 million sets
- Analysis of the application of several common contact parts in high-voltage connectors of new energy vehicles
- Wiring harness durability test and contact voltage drop test method
- Sn-doped CuO nanostructure-based ethanol gas sensor for real-time drunk driving detection in vehicles
- Design considerations for automotive battery wiring harness
- Do you know all the various motors commonly used in automotive electronics?
- What are the functions of the Internet of Vehicles? What are the uses and benefits of the Internet of Vehicles?
- Power Inverter - A critical safety system for electric vehicles
- Analysis of the information security mechanism of AUTOSAR, the automotive embedded software framework
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- Live: Embedded to Cloud Journey with PIC and AVR MCUs from the Microchip Ecosystem Part 2
- Purgatory Legend-RAM War
- [CY8CKIT-149 PSoC 4100S Review] + Familiar with the development environment
- How to write program control for AT28C64
- Motor control design, accuracy? resolution? arc minutes?
- External interrupt and time interrupt count 0-999 displayed on the digital tube example
- 618 big promotion, Keysight1688 online store, share on WeChat Moments to enjoy gifts!
- Introducing a self-developed USB to MIDI chip - USB3125
- [Understanding of FSM finite state machine of LSM6DSOX]--Introduction to state machine
- brd file conversion






 京公网安备 11010802033920号
京公网安备 11010802033920号