The GPIO of STM32 can be configured by software into several different modes. Each I/O port bit can be freely programmed, but the I/O port register must be accessed as a 32-bit word:
A. Chip side:
1. Input:
| MODE | Descriptions |
|---|---|
| Input floating | The pin is configured to be floating and connected to a Schmitt trigger. The common scenario is external buttons. |
| Input pull-up | The input is connected to a pull-up resistor to clamp the uncertain signal to a high level |
| Input Dropdown | The input is connected to a pull-down resistor to clamp the uncertain signal to a low level |
| Analog Input | The signal directly enters the ADC module, which means that the status of the IO port can no longer be read from the input register. |
2. Output:
| MODE | Descriptions |
|---|---|
| Open-drain output | The so-called open drain refers to the drain of the MOSFET. When the IO outputs 1, it is suspended and requires an external circuit pull-up resistor to achieve a high-level output (low-level grounding). It is generally used in situations where the levels do not match, and different level outputs are achieved through external pull-up and pull-down resistors. |
| Push-pull output | Output 0 is connected to GND, output 1 is connected to VCC (ie 0=》GND, 1=》3.3V) |
| Open-drain multiplexing | PinMux to other functions |
| Push-Pull Multiplexing | PinMux to other functions |
B. Hardware side:
The corresponding board has two GPIOs connected to the LED:
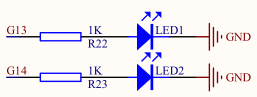

Uses GPIO Port G Pin13 and Pin14
C. Code side:
The steps required to configure the above two GPIOs to work are as follows:
1. Enable the corresponding GPIO_G clock
2. Configure GPIO_G13/GPIO_G14 as general push-pull output, and configure the port line flip speed to 50M
3. After configuration is complete, set the port output to 1/0 to control the GPIO output.
1. Clock settings:
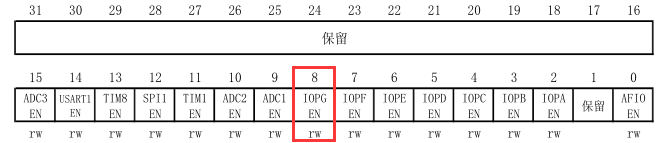
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOG, ENABLE); // Here RCC_APB2Periph_GPIOG is (0x01 << 8)
void RCC_APB2PeriphClockCmd(uint32_t RCC_APB2Periph, FunctionalState NewState)
{
/* Check the parameters */
assert_param(IS_RCC_APB2_PERIPH(RCC_APB2Periph));
assert_param(IS_FUNCTIONAL_STATE(NewState));
if (NewState != DISABLE)
{
RCC->APB2ENR |= RCC_APB2Periph;
}
else
{
RCC->APB2ENR &= ~RCC_APB2Periph;
}
}
2. Configure GPIO_G13/GPIO_G14 as general push-pull output, 50M speed

GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13|GPIO_Pin_14;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOG, &GPIO_InitStructure);
3. Configure output:
STM32 provides multiple ways to configure GPIO output 1/0, including directly writing 1/0 registers (GPIOx_ODR) to the port, registers specifically set to 1 value (GPIOx_BSRR), and registers specifically set to 0 value (GPIOx_BRR). You can use them at will:
#define LED1_ON GPIO_SetBits(GPIOG, GPIO_Pin_13);
#define LED1_OFF GPIO_ResetBits(GPIOG, GPIO_Pin_13);
#define LED2_ON GPIO_SetBits(GPIOG, GPIO_Pin_14);
#define LED2_OFF GPIO_ResetBits(GPIOG, GPIO_Pin_14);
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
/* Check the parameters */
assert_param(IS_GPIO_ALL_PERIPH(GPIOx));
assert_param(IS_GPIO_PIN(GPIO_Pin));
GPIOx->BSRR = GPIO_Pin;
}
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
/* Check the parameters */
assert_param(IS_GPIO_ALL_PERIPH(GPIOx));
assert_param(IS_GPIO_PIN(GPIO_Pin));
GPIOx->BRR = GPIO_Pin;
}
The basic usage is as described above. Later, in the specific peripheral part, the multiplexing function of GPIO will be introduced.
Previous article:STM32F103ZET6 — USART
Next article:STM32 Boot mode setting method
Recommended ReadingLatest update time:2024-11-16 12:25

 Digilent Vivado library
Digilent Vivado library Raspberry Pi Development in Action (2nd Edition) ([UK] Simon Monk)
Raspberry Pi Development in Action (2nd Edition) ([UK] Simon Monk)




 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- Understanding of TIMERA timing interrupt of MSP430F149
- What is the difference between pyb.delay and time.sleep?
- Stepper motor current test
- [RVB2601 creative application development] + light intensity detection
- 【DIY Creative LED】Effect Demonstration
- [GD32450I-EVAL] USART and DMA variable length reception
- ESP32-S3 Technical Reference Manual Latest Manual
- 【DSP】TMS320F28035 ADC routine (software trigger + query)
- Ask for help either
- STEVAL-MKI109V3 Unico-GUI cannot connect, prompting The adapter board has not been recognized






 京公网安备 11010802033920号
京公网安备 11010802033920号