Introduction
The car MP3 wireless transmitter can send the music stored in the MP3 player through FM broadcasting, then receive it through the FM radio and play it through the car audio. This paper uses the single-chip microcomputer AT89C52 and the digital phase-locked loop MC145152 and other chips to design the car MP3 wireless transmitter. From the simulation results and the operation of the target prototype, the expected effect has been achieved.
System composition
Figure 1 is a system composition block diagram of the car intelligent MP3 wireless transmitter. It is mainly composed of MC145152 and MC1648 to form a digital phase-locked loop frequency synthesizer, and uses a variable capacitance diode MV209 for frequency modulation. Users can use simple buttons to control and monitor the transmission frequency through the single-chip microcomputer AT89C52, and use the LCD to display feedback information. In addition, the serial port can be used to realize the communication between the single-chip microcomputer and the computer, so as to control the transmitter intelligently through the computer. The sound source can not only be obtained from the car MP3 player, but also can be provided by the computer or even the network resources.
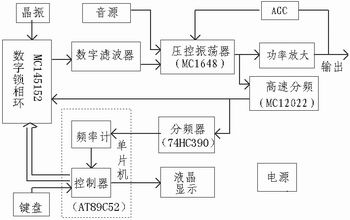
Figure 1 System composition block diagram
Design of each component module
Design of digital phase-locked loop frequency synthesizer
This paper adopts MC145152, which integrates crystal oscillator, reference divider, frequency/phase detector, programmable divider and other circuits , simplifying the circuit design. At the same time, the single-chip microcomputer is used to control MC145152 to determine the corresponding relationship between the frequency division coefficient A, N and the transmission frequency.
The control of the frequency synthesizer is realized by the single-chip microcomputer. From the formula f0=(P×N+A)×fr (where f0 is the VCO output frequency, P is the frequency division coefficient of the high-speed divider in Figure 1, N and A are the programmable frequency division coefficients of the single-chip microcomputer, and fr is the frequency modulation step value), it can be seen that the output frequency can be controlled by A and N. The values of A and N are sent to MC145152 from P2.2~P2.7 (6 bits) and P0 port (8 bits) of the single-chip microcomputer respectively. Originally, sending the N value requires 10 data lines, but because f0 belongs to the 88~108MHz frequency band, if the 10KHz frequency modulation step value fr is used, according to the formula f0=(P×N+A)×fr, the highest bit of the N value (N9, N8) can be calculated to be 0, and the output port of the microcontroller can be omitted, and the N9 and N8 pins of MC145152 can be directly grounded. The voltage
-controlled oscillator is the key part of the frequency synthesis circuit. It uses the integrated VCO chip MC1648, whose operating voltage is 5V, the output frequency can reach up to 225MHz, and the output waveform distortion is small. It uses a parallel LC resonant tank composed of a varactor diode MV09 and an inductor , and the oscillation frequency will be controlled by the bias voltage of the varactor diode.
Design of high-speed divider
Since the frequency of the transmitter is as high as 88MHz, MC145152 cannot directly divide it. It must first be pre-divided by the high-speed divider of ECL (unsaturated logic circuit) to reduce the frequency, and then further divided by MC145152 to obtain a frequency equal to the reference frequency, and then perform phase detection. In order to make the frequency division coefficient continuously adjustable, the programmable frequency division circuit adopts the swallow pulse counting method, which is composed of ECL's high-speed divider MC12022 and the ÷A subtraction counter and ÷N subtraction counter inside MC145152.
Control circuit design and frequency calculation
The functions of the control circuit include: responding to key input, controlling the LCD display, calculating and outputting control signals to MC145152, and monitoring the transmission frequency. The single-chip microcomputer uses an 11.0592MHz crystal oscillator, which is connected from the X1 and X2 ports. The two pins of the crystal oscillator are connected to the ground with a load capacitor of 30pF .
Frequency measurement can be completed by a single-chip microcomputer. There are two timers/counters inside the microcontroller, one for timing to generate a standard time base gate signal, and one for counting to count the number of pulses input within the gate time, and then convert it to the actual input frequency.
Similar to MC145152, the microcontroller cannot directly measure at a frequency as high as 88MHz. The transmission frequency must be pre-divided to reduce it to the frequency range that the microcontroller can measure, and converted into a universal TTL level, and then connected to the frequency measurement interface. The measured results are displayed on a liquid crystal display. The output frequency of MC12022 is at least 88MHz/64=1.375MHz, which is higher than the upper limit of the microcontroller's frequency measurement and cannot be used directly. Therefore, a frequency divider with a division factor of 100 is required. This article uses the lower-priced frequency divider 74HC390. The
VCO output frequency range is 88 MHz ~108MHz. First, the reference frequency fc should be determined, and fr is the step size (frequency interval). fr can be determined by formula 1.
(1) Since the R value is fixed, it can only be selected from 8 reference values. If fc uses a 10.2400MHz crystal oscillator as the standard frequency, it is divided by ÷R, R is 2048, and the 5KHz pulse signal is obtained as fr. This value can be changed by the microcontroller.
The range of N and A values determined by fr should be within the working range of MC145152 (A value range 0~63, N value range 0~1023), and N>A must be satisfied. The swallow pulse counting method is adopted, and formula 2 is the total division ratio. As long as N>A, although P is a fixed value, as long as the values of N and A are reasonably selected, ∑ can be continuous.
(2) At this time, f0 is locked at: f0=(P×N+A)×fr
(3) Where N is 0~1023; A is 0~63; P=64 (determined by MC12022). The parameters corresponding to each frequency can be easily calculated through the formula.
Software Design
The key to software design is the control and frequency measurement display of MC145152. The functions implemented by the software are:
① Set the frequency interval fr÷R, that is, determine the frequency modulation step;
② Set the value of the frequency division coefficient A and N to obtain the required output frequency;
③ Measure the output frequency and display it;
④ Drive the LCD.
Program design of the control and display part of MC145152
Figure 2 is a software design flow chart. The crystal frequency is 10.2400MHz. First, determine its frequency interval and divide it by ÷R. If R is 2048, the frequency interval is 5kHz. By changing the counting method, the frequency modulation step values that can be obtained are 5kHz, 100kHz and 500kHz respectively. The calculation of A and N values can be completed by the above formulas, but in program design, the algorithm is not written as a program, but to find the change law of A and N. Table 1 shows the A and N values corresponding to different step values (only part of them are listed due to space limitations). When the step value is 5kHz, 100kHz, 500kHz, the A value increases by 1, 20, and 36 respectively. Since the range of A value is 0~63, and N>A must be satisfied. In program design, it is not necessary to store each change in the microcontroller, but to use a variable fa, whose value corresponds to different steps, and takes the value of 1, 20 or 36. This saves system resources, and the A and N values can be determined according to the set frequency and sent to MC145152.
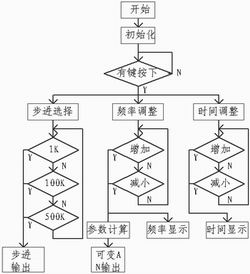
Figure 2 Software Design Flowchart
Frequency Measurement Subroutine
Frequency measurement is to measure and display the set output frequency in real time. Programming is implemented in C language . The program includes four modules: frequency divider, frequency measurement controller, counter and latch. Finally, the measured data is latched and sent to the LCD display. The principle is to use the counter to count the pulses of the measured frequency. When the clock cycle is Is, the number of pulses measured is the measured frequency. Frequency measurement control is designed to complete automatic frequency measurement. It controls the work of the counter so that its counting cycle is Is. After Is, it stops counting and sends the count value at this time to the latch for latching. At the same time, the counter is cleared to start counting the next cycle. The count value is the measured frequency.
Conclusion
In the process of developing the car MP3 wireless transmitter, several frequency synthesis design schemes were used. After comparison, the digital phase-locked loop frequency synthesis circuit with single-chip microcomputer control and MC145152 as the core was finally selected to realize automatic frequency tracking and the center frequency stability met the requirements. It is designed to be digitally controlled variable frequency to obtain any frequency. After testing, it has relatively high frequency stability and reliability.
Keywords:MP3
Reference address:Design of Intelligent MP3 Wireless Transmitter for Cars
The car MP3 wireless transmitter can send the music stored in the MP3 player through FM broadcasting, then receive it through the FM radio and play it through the car audio. This paper uses the single-chip microcomputer AT89C52 and the digital phase-locked loop MC145152 and other chips to design the car MP3 wireless transmitter. From the simulation results and the operation of the target prototype, the expected effect has been achieved.
System composition
Figure 1 is a system composition block diagram of the car intelligent MP3 wireless transmitter. It is mainly composed of MC145152 and MC1648 to form a digital phase-locked loop frequency synthesizer, and uses a variable capacitance diode MV209 for frequency modulation. Users can use simple buttons to control and monitor the transmission frequency through the single-chip microcomputer AT89C52, and use the LCD to display feedback information. In addition, the serial port can be used to realize the communication between the single-chip microcomputer and the computer, so as to control the transmitter intelligently through the computer. The sound source can not only be obtained from the car MP3 player, but also can be provided by the computer or even the network resources.

Figure 1 System composition block diagram
Design of each component module
Design of digital phase-locked loop frequency synthesizer
This paper adopts MC145152, which integrates crystal oscillator, reference divider, frequency/phase detector, programmable divider and other circuits , simplifying the circuit design. At the same time, the single-chip microcomputer is used to control MC145152 to determine the corresponding relationship between the frequency division coefficient A, N and the transmission frequency.
The control of the frequency synthesizer is realized by the single-chip microcomputer. From the formula f0=(P×N+A)×fr (where f0 is the VCO output frequency, P is the frequency division coefficient of the high-speed divider in Figure 1, N and A are the programmable frequency division coefficients of the single-chip microcomputer, and fr is the frequency modulation step value), it can be seen that the output frequency can be controlled by A and N. The values of A and N are sent to MC145152 from P2.2~P2.7 (6 bits) and P0 port (8 bits) of the single-chip microcomputer respectively. Originally, sending the N value requires 10 data lines, but because f0 belongs to the 88~108MHz frequency band, if the 10KHz frequency modulation step value fr is used, according to the formula f0=(P×N+A)×fr, the highest bit of the N value (N9, N8) can be calculated to be 0, and the output port of the microcontroller can be omitted, and the N9 and N8 pins of MC145152 can be directly grounded. The voltage
-controlled oscillator is the key part of the frequency synthesis circuit. It uses the integrated VCO chip MC1648, whose operating voltage is 5V, the output frequency can reach up to 225MHz, and the output waveform distortion is small. It uses a parallel LC resonant tank composed of a varactor diode MV09 and an inductor , and the oscillation frequency will be controlled by the bias voltage of the varactor diode.
Design of high-speed divider
Since the frequency of the transmitter is as high as 88MHz, MC145152 cannot directly divide it. It must first be pre-divided by the high-speed divider of ECL (unsaturated logic circuit) to reduce the frequency, and then further divided by MC145152 to obtain a frequency equal to the reference frequency, and then perform phase detection. In order to make the frequency division coefficient continuously adjustable, the programmable frequency division circuit adopts the swallow pulse counting method, which is composed of ECL's high-speed divider MC12022 and the ÷A subtraction counter and ÷N subtraction counter inside MC145152.
Control circuit design and frequency calculation
The functions of the control circuit include: responding to key input, controlling the LCD display, calculating and outputting control signals to MC145152, and monitoring the transmission frequency. The single-chip microcomputer uses an 11.0592MHz crystal oscillator, which is connected from the X1 and X2 ports. The two pins of the crystal oscillator are connected to the ground with a load capacitor of 30pF .
Frequency measurement can be completed by a single-chip microcomputer. There are two timers/counters inside the microcontroller, one for timing to generate a standard time base gate signal, and one for counting to count the number of pulses input within the gate time, and then convert it to the actual input frequency.
Similar to MC145152, the microcontroller cannot directly measure at a frequency as high as 88MHz. The transmission frequency must be pre-divided to reduce it to the frequency range that the microcontroller can measure, and converted into a universal TTL level, and then connected to the frequency measurement interface. The measured results are displayed on a liquid crystal display. The output frequency of MC12022 is at least 88MHz/64=1.375MHz, which is higher than the upper limit of the microcontroller's frequency measurement and cannot be used directly. Therefore, a frequency divider with a division factor of 100 is required. This article uses the lower-priced frequency divider 74HC390. The
VCO output frequency range is 88 MHz ~108MHz. First, the reference frequency fc should be determined, and fr is the step size (frequency interval). fr can be determined by formula 1.
(1) Since the R value is fixed, it can only be selected from 8 reference values. If fc uses a 10.2400MHz crystal oscillator as the standard frequency, it is divided by ÷R, R is 2048, and the 5KHz pulse signal is obtained as fr. This value can be changed by the microcontroller.
The range of N and A values determined by fr should be within the working range of MC145152 (A value range 0~63, N value range 0~1023), and N>A must be satisfied. The swallow pulse counting method is adopted, and formula 2 is the total division ratio. As long as N>A, although P is a fixed value, as long as the values of N and A are reasonably selected, ∑ can be continuous.
(2) At this time, f0 is locked at: f0=(P×N+A)×fr
(3) Where N is 0~1023; A is 0~63; P=64 (determined by MC12022). The parameters corresponding to each frequency can be easily calculated through the formula.
Software Design
The key to software design is the control and frequency measurement display of MC145152. The functions implemented by the software are:
① Set the frequency interval fr÷R, that is, determine the frequency modulation step;
② Set the value of the frequency division coefficient A and N to obtain the required output frequency;
③ Measure the output frequency and display it;
④ Drive the LCD.
Program design of the control and display part of MC145152
Figure 2 is a software design flow chart. The crystal frequency is 10.2400MHz. First, determine its frequency interval and divide it by ÷R. If R is 2048, the frequency interval is 5kHz. By changing the counting method, the frequency modulation step values that can be obtained are 5kHz, 100kHz and 500kHz respectively. The calculation of A and N values can be completed by the above formulas, but in program design, the algorithm is not written as a program, but to find the change law of A and N. Table 1 shows the A and N values corresponding to different step values (only part of them are listed due to space limitations). When the step value is 5kHz, 100kHz, 500kHz, the A value increases by 1, 20, and 36 respectively. Since the range of A value is 0~63, and N>A must be satisfied. In program design, it is not necessary to store each change in the microcontroller, but to use a variable fa, whose value corresponds to different steps, and takes the value of 1, 20 or 36. This saves system resources, and the A and N values can be determined according to the set frequency and sent to MC145152.

Figure 2 Software Design Flowchart
Frequency Measurement Subroutine
Frequency measurement is to measure and display the set output frequency in real time. Programming is implemented in C language . The program includes four modules: frequency divider, frequency measurement controller, counter and latch. Finally, the measured data is latched and sent to the LCD display. The principle is to use the counter to count the pulses of the measured frequency. When the clock cycle is Is, the number of pulses measured is the measured frequency. Frequency measurement control is designed to complete automatic frequency measurement. It controls the work of the counter so that its counting cycle is Is. After Is, it stops counting and sends the count value at this time to the latch for latching. At the same time, the counter is cleared to start counting the next cycle. The count value is the measured frequency.
Conclusion
In the process of developing the car MP3 wireless transmitter, several frequency synthesis design schemes were used. After comparison, the digital phase-locked loop frequency synthesis circuit with single-chip microcomputer control and MC145152 as the core was finally selected to realize automatic frequency tracking and the center frequency stability met the requirements. It is designed to be digitally controlled variable frequency to obtain any frequency. After testing, it has relatively high frequency stability and reliability.
Previous article:Realization of low-end vehicle-mounted image data acquisition, compression, storage and transmission system
Next article:Design and implementation of automobile anti-theft system based on RFID
- Popular Resources
- Popular amplifiers
 5962-8770602PX
5962-8770602PX
Recommended Content





Latest Microcontroller Articles
He Limin Column
Microcontroller and Embedded Systems Bible
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
MoreSelected Circuit Diagrams






MorePopular Articles
- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
MoreDaily News
- Huawei's Strategic Department Director Gai Gang: The cumulative installed base of open source Euler operating system exceeds 10 million sets
- Download from the Internet--ARM Getting Started Notes
- Learn ARM development(22)
- Learn ARM development(21)
- Learn ARM development(20)
- Learn ARM development(19)
- Learn ARM development(14)
- Learn ARM development(15)
- Analysis of the application of several common contact parts in high-voltage connectors of new energy vehicles
- Wiring harness durability test and contact voltage drop test method
Guess you like
- Cigarette lighter passed automotive electronics 7637 certification
- EEWorld 15th Anniversary "Easter Egg" - Pay postage to get a development board and books
- Regarding the problem of battery catching fire under stress, can someone explain it?
- Share the question of BQ34110 cycle count error update
- The serial port sends 14k data at a time, how does the microcontroller receive it
- Time to order takeout~
- All the printed pictures are FF
- Can a 100Ω resistor solve the circuit oscillation problem?
- The USB device code generated by STM32 cubeMX is quite different from the sample code of sensor tile box.
- Do you have any plans to use HarmonyOS? Share: Get started with HarmonyOS quickly from official resources






 京公网安备 11010802033920号
京公网安备 11010802033920号