Analysis of multi-loop feedback control strategy for single-phase inverter
A multi-loop feedback control strategy is applied to adjust the output of the uninterruptible power supply inverter. The time domain and frequency domain characteristics of this control strategy are analyzed. Finally, simulation and experimental waveforms are given. The results prove that this control method has a good control effect on both linear loads and rectifier bridge loads.
Keywords: inverter; multi-loop feedback; digital control
0 Introduction
In the past, the research on inverters focused on the use of new high-frequency switching power devices to reduce the filter size, optimize the output filter design to achieve low output impedance, etc. These measures can suppress output waveform distortion and improve load adaptability to a certain extent, but they are not ideal. In order to further improve the dynamic and static characteristics of the inverter, new control methods must be adopted. The use of repetitive control technology can better suppress periodic interference. However, the control characteristics of repetitive control delaying one power frequency cycle make the dynamic characteristics of the inverter using repetitive control alone extremely poor, and basically cannot meet the index requirements of the inverter. If dual-loop control and repetitive control are combined to form a composite control method, better results can be achieved. However, this control method takes up more computing time, increases costs, and makes the system complicated. Sliding mode control with nonlinear compensation has also been applied in the closed-loop control of the inverter. Although sliding control has a fast dynamic response and is insensitive to system parameters and load changes, it is difficult to establish a satisfactory sliding surface.
The dual-loop control of capacitor current sampling can greatly improve the dynamic response speed of the system. If the forward control and the reverse control are combined to form a composite control system, a relatively ideal control effect can be achieved. This paper adopts the composite control scheme of output voltage and filter capacitor current feedback with forward compensation.
l Inverter control model
Figure 1 is the main circuit diagram of the full-bridge inverter. Vd is the DC voltage source, S1~S4 are 4 IGBT switches, L and C are filter inductors and filter capacitors, which are used to filter out high-order harmonics in the inverter system. RL and RC are the equivalent series impedances of the filter inductors and filter capacitors. z is the load, which can be purely resistive or nonlinear. The inverter main circuit shown in Figure 1 is a nonlinear system due to the presence of switching devices. However, when the switching frequency of the device is much greater than the fundamental frequency of the inverter output voltage, it can be analyzed using state space averaging and linearization techniques. As shown in Figure 1, the following dynamic equations of the inverter model can be obtained:


Where: iC, iL, iZ are the currents through the inductor, capacitor, and load, respectively.
Where: ic, iL, iz The above dynamic equation shows the relationship between the various quantities in the inverter. In the process of establishing the above equation, the inverter can be regarded as an amplifier with a constant gain. Based on the above dynamic equation, a composite controller as shown in Figure 2 can be designed. The definitions of the parameters in Figure 2 are listed in Table 1.


2 Characteristic analysis of controller model
In the control block diagram of Figure 2, the voltage loop is used as the outer loop of the feedback instantaneous control, and the current loop is used as the inner loop of the feedback instantaneous control. The output voltage of the inverter is compared with the reference voltage through the proportional link. The error is adjusted by PI and used as part of the reference of the inner loop of the current control. The other part of the reference comes from the forward feedback of the reference voltage. This composite reference is compared with the capacitor current from the proportional link, and then the output voltage of the inverter switch tube is obtained after proportional adjustment and amplification. In order to analyze the above control principle more clearly, the following engineering analysis method is now adopted, namely
1) Since the filter constants of the voltage and current feedback links are very small, they are ignored;
2) The equivalent series impedance of the filter inductor and filter capacitor has little effect on the circuit performance, so they are also ignored;
3) The linear resistor is analyzed as the load object.
Take the PI adjustment function as
![]() The error of Uref can be reproduced to zero (proof omitted). Using the above analysis, Figure 2 can be simplified to Figure 3.
The error of Uref can be reproduced to zero (proof omitted). Using the above analysis, Figure 2 can be simplified to Figure 3.

In this way, the open-loop transfer function of the inverter is obtained as:

Its poles and zeros are

Usually
 Then formula (5) can be simplified to
Then formula (5) can be simplified to

According to the above function expression, the closed-loop root locus is shown in Figure 4. The dotted part in Figure 4 is the root locus of the voltage instantaneous value feedback control, and the solid line is the root locus of the composite control adopted in this paper. Figure 4 (a) and Figure 4 (b) are the locus diagrams of light load and full load, respectively. It can be seen from Figure 4 that the control scheme adopted in this paper introduces additional zero points in the open-loop transfer function, which makes the root locus of the closed-loop system far away from the imaginary axis, greatly increasing the stability of the system. Moreover
![]() , the value of ! is relatively large, so it can reduce the adjustment time of the system without causing a large overshoot of the system.
, the value of ! is relatively large, so it can reduce the adjustment time of the system without causing a large overshoot of the system.

3 Simulation and Experiment
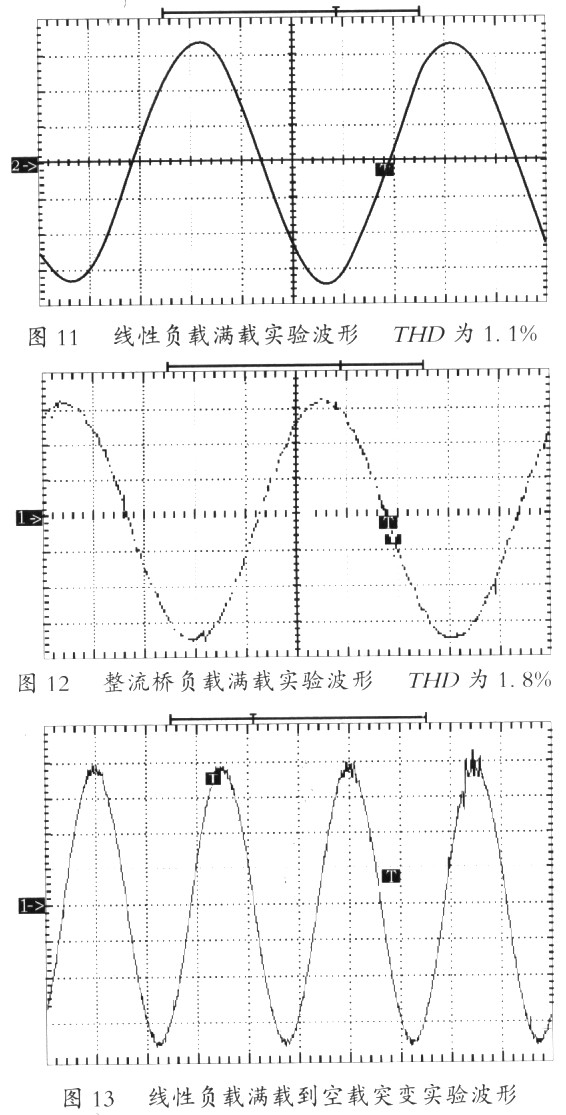
Figures 5 to 8 are simulation results of the control scheme above using an inverter. The switching in the figure is selected at the peak of the sine wave, which represents the maximum voltage skewing of the switching. The dynamic adjustment time of the waveform shown in the figure is less than 0.5ms, and the steady-state rectifier bridge load THD is 1%. Figures 9 and 10 show that the phase margin of the open-loop and closed-loop systems of the system is greater than 60°, leaving enough stability margin for the lag of digital control, dead zone effect, lag characteristics of the filter, etc. Moreover, the adjustment time is very fast, the gain in the passband is stable, and the phase shift is very small.


4 Conclusion
This paper analyzes a composite control technology for inverters. The control principle analysis, simulation and experimental results show that this control method has good stability, excellent steady-state and dynamic performance, and is an inverter control technology worthy of promotion and application.
Previous article:Nonlinear Correction Method of Icing Sensor Based on BP Network
Next article:Research on Photovoltaic Water Pump Inverter Based on dsPIC30F2010 Digital Signal Controller (DSC)
- Popular Resources
- Popular amplifiers
 LH0063K/883
LH0063K/883- Molex leverages SAP solutions to drive smart supply chain collaboration
- Pickering Launches New Future-Proof PXIe Single-Slot Controller for High-Performance Test and Measurement Applications
- CGD and Qorvo to jointly revolutionize motor control solutions
- Advanced gameplay, Harting takes your PCB board connection to a new level!
- Nidec Intelligent Motion is the first to launch an electric clutch ECU for two-wheeled vehicles
- Bosch and Tsinghua University renew cooperation agreement on artificial intelligence research to jointly promote the development of artificial intelligence in the industrial field
- GigaDevice unveils new MCU products, deeply unlocking industrial application scenarios with diversified products and solutions
- Advantech: Investing in Edge AI Innovation to Drive an Intelligent Future
- CGD and QORVO will revolutionize motor control solutions






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- Bluetooth module connection problem
- Ethernet LED is not on
- AM57x Processors for Smart Grid Applications
- The pinout has changed, where should I modify?
- EMC signal integrity test 1---get out of the metaphysics
- Bluetooth protocol specifications (HCI, L2CAP, SDP, RFOCMM)
- Keep up with the future and enter the NXP Technology Center lecture hall to watch the removable development board, AI-IoT series of books, and red envelopes
- A USB20 communication design for real-time image system.pdf
- STBLESensor Android APP 4.8.0
- Discussion on some details of dual independent clock fifo






 京公网安备 11010802033920号
京公网安备 11010802033920号