This paper applies the idea of input-to-state feedback linearization to the generator excitation control system and obtains a set of practical generator nonlinear excitation control laws. The nonlinear control laws derived by the method of this paper are consistent with those derived by the state feedback precise linearization method, but the method proposed in this paper is simpler and more practical than the state feedback precise linearization method based on differential geometry theory. Simulations show that the nonlinear excitation controller proposed in this paper can suppress the oscillation of the system better than the conventional AVR+PSS when a large disturbance occurs in the system. It has a certain effect on enhancing the stability of the system.
Keywords: nonlinear; input-to-state feedback linearization; differential geometry; excitation control
Nonlinear excitation controller based on input-state linearization
HU Zhaoqing, MAO Chengxiong, LU Jiming
(Collage of Electrical Electronics Engineering, HuaZhong
University of Science and Technology, Wuhan 430074, China)
Abstract: The nonlinear excitation controller based on input-state linearization theory is proposed in this paper. The control law inferred from the proposed method has the coherence with the result deduced from the exact linearization based on theory of differential geometry; however, the method presented in this paper is more convenient and practical. Simulation results show that the proposed nonlinear controller can provide better damping characteristics than the general AVR+PSS when the power system is subject to the small or large disturbance.
Key words: nonlinear control; input-state linearization; differential geometry; excitation control
1 Introduction
The stability of power system operation is the basic requirement for safe operation of power system, and the control of synchronous generator excitation is an economical and effective means to improve the stability of power system operation. By applying appropriate control to the excitation of the generator, the stability of the power system under large and small disturbances can be improved [1-3]. In the past, the design of excitation controllers was usually based on the linearization method of the operating point, and the power system was treated as a linearized system. However, the nonlinearity of the power system determines the limitations of this method. The state feedback precise linearization method based on differential geometry theory was introduced into the design of generator excitation control system [6]. However, this method requires complex differential geometry mathematical tools. As an improvement, the literature [7-9] proposed a nonlinear excitation controller based on direct feedback linearization theory. This paper proposes a nonlinear excitation controller based on input-to-state feedback linearization. This method is practical, convenient and easy to understand. This paper conducts a detailed simulation study on this new excitation controller. The simulation results show that this nonlinear excitation controller has a certain effect on improving the stability of the power system under large and small disturbances.
2 Brief introduction to the theory of input-to-state feedback linearization
For a given single-input affine nonlinear system:

The condition that system (1) can be linearized by input-to-state feedback is that the system has a relative degree r=n, where n is the order of the system. If the nonlinear system (1) can be linearized by input-to-state feedback. Then
 there exists a differential homeomorphism T:Ω→Rn in a neighborhood Ω Rn. Under the new coordinate transformation z=T(x), the system can be transformed into:
there exists a differential homeomorphism T:Ω→Rn in a neighborhood Ω Rn. Under the new coordinate transformation z=T(x), the system can be transformed into:
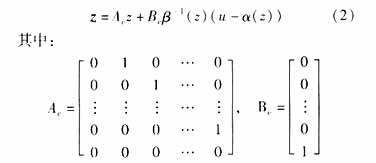

At the same time, the expressions of a(x) and B(x) can be obtained, as shown in equation (4).
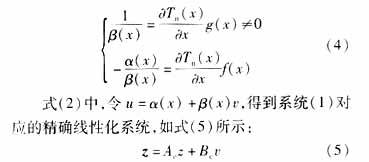
Equation (5) is a linearized system, so its control law can be designed completely according to the method of linear system.
3 Nonlinear excitation control design
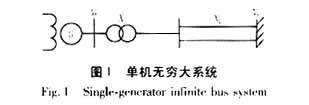
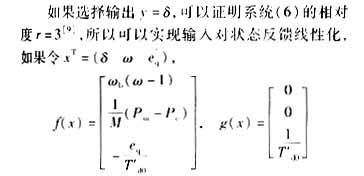
The system to be studied is shown in Figure 1. The generator adopts a simplified third-order model. When the prime mover power is kept constant and the influence of friction damping is ignored, the system can be represented by the following set of differential equations:
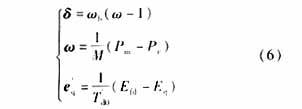
Where: δ is the generator power angle, Wb=2πf, W is the generator angular frequency, Pm is the prime mover power, Pe is the generator electromagnetic power, e′q is the transient potential, Efd is the excitation voltage, and Eq is the no-load potential. M is the inertia time constant, and T′do is the transient time constant of the excitation winding.
The system equation can be written as:

Since the system can realize the linearization of input to state feedback, there exists a reversible transformation z=T(x)=(T1(x) T2(x) T3(x))T to convert the system into the form of (5). From (3), we can get:
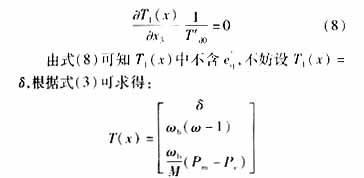
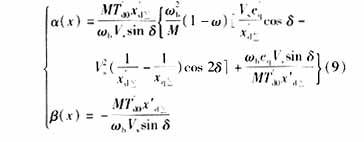
Its inverse transformation T-1(z) exists. According to equation (4), a(x), β(x) can be obtained.
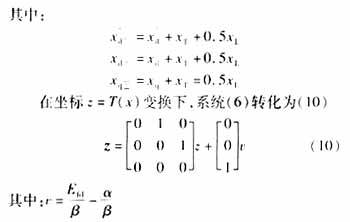
System (10) is a linear system. The control quantity can be designed according to linear optimal control [10]. The control quantity expression is shown in equation (11):

It can be proved that the control law derived by the input-to-state feedback linearization method is consistent with the control law derived by the state feedback exact linearization method based on differential geometry theory and the direct feedback linearization (DFL) method [6][8][9], but the method in this paper is simpler and more practical.
In this way, the calculation of the control quantity only requires the measurement of δ, W, and Pe.
4 Simulation results
For the system shown in Figure 1, the dynamic process of the system under two disturbances is simulated: (1) three-phase short circuit and fault removal after 0.2s; and (2) the double-circuit line operation is restored after the removal of one line for 3.5m. The simulation results are shown in Figures 2 and 3.



As can be seen from Figure 2 and Figure 3, the nonlinear excitation controller proposed in this paper always shows better damping characteristics than the conventional AVR+PSS when the system is disturbed. Therefore, the use of a nonlinear excitation controller can better suppress the oscillation of the system when a fault occurs, which has a certain promoting effect on enhancing the stability of the system.
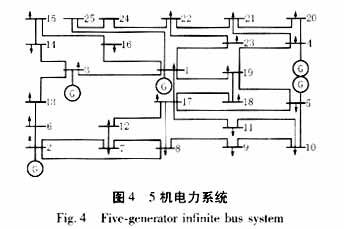
In addition, this paper simulates the five-machine power system shown in Figure 4. Assuming that a three-phase short circuit occurs at the outlet of the No. 3 generator, a conventional AVR+PSS or a nonlinear excitation controller is installed on the No. 3 machine to examine the dynamic response of the multi-machine system. The simulation results are shown in Figure 5.
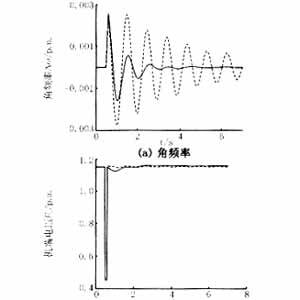

As can be seen from Figure 5, when the generator is equipped with the nonlinear excitation controller proposed in this paper, it can calm the oscillation faster than the conventional AVR+PSS when the system fails.
5 Conclusions
This paper proposes a nonlinear excitation controller based on the input-to-state feedback linearization theory. The obtained control law is consistent with the control law derived by the precise linearization idea based on differential geometry theory, but the method in this paper is simpler and more practical, which is conducive to engineering application. The simulation results of single-machine infinite system and multi-machine system prove that compared with the conventional AVR+PSS, the nonlinear excitation controller can better suppress the oscillation of the power system under large and small disturbances, and has a certain effect on enhancing the stability of the system.
Previous article:Research on a Practical Control Strategy of Three-Phase Active Filter
Next article:Research on Network Topology of Computer Monitoring System in Power Plant
- Popular Resources
- Popular amplifiers
 LTC6240HVHS8#TRPBF
LTC6240HVHS8#TRPBF- Molex leverages SAP solutions to drive smart supply chain collaboration
- Pickering Launches New Future-Proof PXIe Single-Slot Controller for High-Performance Test and Measurement Applications
- CGD and Qorvo to jointly revolutionize motor control solutions
- Advanced gameplay, Harting takes your PCB board connection to a new level!
- Nidec Intelligent Motion is the first to launch an electric clutch ECU for two-wheeled vehicles
- Bosch and Tsinghua University renew cooperation agreement on artificial intelligence research to jointly promote the development of artificial intelligence in the industrial field
- GigaDevice unveils new MCU products, deeply unlocking industrial application scenarios with diversified products and solutions
- Advantech: Investing in Edge AI Innovation to Drive an Intelligent Future
- CGD and QORVO will revolutionize motor control solutions






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- [N32L43x Review] 3. Using serial port receive interrupt and idle interrupt to realize variable length data reception
- EEWORLD University - Understand the basic technology of power density
- RedMonk's 20 most popular programming languages in June 2020
- EEWORLD University Hall----Live Replay: Melexis explains the implementation and technical support of semiconductor R&D functional safety
- MSP430F149 serial RS485 interface
- Optocoupler replacement
- Working principle of photoelectric encoder
- FPGA controls TMS320C6678 power-on reset program
- Lee Kun-hee, chairman of South Korea's Samsung, has passed away. How do you evaluate his life?
- RTT & Renesas high performance CPK-RA6M4 development board review - SPI driven OLED






 京公网安备 11010802033920号
京公网安备 11010802033920号