As the scale of industry continues to expand, the impact load connected to the power system has increased dramatically, and the power quality problem has become more and more serious, resulting in a decline in product quality and even interruption of the production process. According to statistics from scholars and power departments in various countries, among the various power quality problems in the power system, voltage sag is the most harmful. At present, the most effective compensation device is the dynamic voltage restorer (DVR).
When traditional DVRs compensate for voltage sags, the energy required is provided by a rectifier connected in parallel to the compensated grid. The disadvantage is that it cannot compensate for deep voltage sags. Therefore, some scholars have proposed that energy storage devices should be used to provide energy. Common energy storage devices include: batteries, supercapacitors, superconducting energy storage devices, and flywheel energy storage devices. Compared with other energy storage methods, flywheel energy storage has the characteristics of high energy storage, long life, high efficiency, and no pollution. Therefore, it is widely used in flywheel batteries and industrial UPS power supplies. Flywheel energy storage is a high-speed rotating flywheel mass as a medium for mechanical energy storage, using motors and energy conversion control systems to control energy input (energy storage) and output (energy release). At present, the highest indicators of commercialized flywheel energy storage units are usually 2 to 5 kWh of energy storage and 250 kW of power. If higher power and larger energy storage are required, flywheel energy storage units need to be operated in parallel to achieve this. The literature studies the control strategy of multiple flywheels running in parallel and proposes a control strategy that distributes the output power of each flywheel energy storage device in proportion to the energy that can be released by the flywheel. This control strategy will result in uneven charging and discharging times of each parallel flywheel.
In view of the above shortcomings, this paper proposes a new dynamic voltage restorer based on flywheel energy storage; analyzes the working principle of the system and the control strategies of each part in detail; proposes a new discharge control strategy for flywheel parallel operation; and finally, simulates and verifies the system.
1 Circuit Topology
The topological structure of the DVR based on flywheel energy storage is shown in Figure 1, which mainly consists of a DVR converter, a filter, a bypass switch, a series transformer, a converter A, an inductor L and a flywheel energy storage array (FESA).
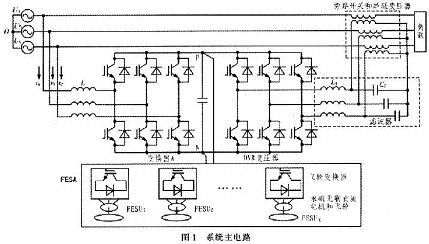
The DVR converter, filter, bypass switch and series transformer together form a series voltage restorer. Converter A and inductor L form a PWM rectifier. The flywheel energy storage array is composed of multiple flywheel energy storage units (FESU) connected in parallel. The flywheel energy storage unit consists of three parts: flywheel converter, permanent magnet brushless DC motor and flywheel. When the grid voltage is normal, the flywheel is in a charging state: when the grid voltage drops temporarily, the DVR converter injects compensation voltage into the grid through the series transformer to ensure that the load voltage is the rated voltage. When the voltage drops slightly, the energy is provided by the grid; when the voltage drops deeply, the energy is provided by the flywheel.
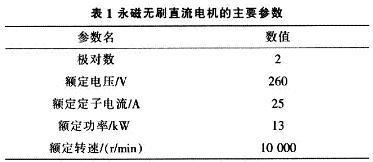
The drive motor adopts a three-phase permanent magnet brushless DC motor because of its reliable operation, maintenance-free, high efficiency and good speed regulation performance. Its main parameters are shown in Table 1.
2 System control strategy
2.1 Flywheel charging control
The charging control of the flywheel adopts a dual-loop control structure, with the outer loop being the speed loop and the inner loop being the current loop. Among them, the speed regulator adopts compound control. In the startup phase, it is hoped that the speed will rise quickly, but the control accuracy requirement is relatively low, so constant torque current limiting startup is adopted; in the speed regulation phase, a constant power charging mode is adopted. As the speed increases, the input current decreases inversely, which can reduce the impact of unbalanced magnetic pull on the rotor stability. Constant power charging uses the maximum power P* that the system can withstand as the acceleration power; when the speed reaches a steady state, it is hoped that a higher steady-state accuracy will be achieved, so PI control is adopted.
2.2 Flywheel discharge control
During the flywheel discharge process, the motor runs in a braking state. As the speed decreases, the voltage also decreases. In order to obtain a constant DC bus voltage, a half-bridge modulation method of motor feedback braking is adopted.
Each parallel flywheel is of the same specification and has basically the same electrical parameters. The interval between two voltage drops is sufficient to allow all flywheels to increase their speed to the rated speed, so the power and energy storage are equal. In order to reduce system losses, the number of flywheels put into operation during each discharge should be as small as possible. The key point of flywheel discharge control is how to calculate the number of flywheels to be discharged and the output current command value of each flywheel.
The charge and discharge times of each flywheel are: T1≥T2≥…,≥TN, then the discharge control strategy is as follows:
1) Sort the flywheels in order from least to most times of charge and discharge. If the times of charge and discharge are the same, the one with higher speed will have smaller serial number.
2) Determine the number m of flywheels entering the discharge state according to formula (1).
![]()
Where Pmaxi is the maximum output power of the i-th flywheel; P* is the power command value that needs to be output.
3) When P*![]() , and the output current command value of FESUM is
, and the output current command value of FESUM is
![]() .
.
As energy is released, the flywheel speed decreases, so the energy storage and output power decrease accordingly. When the original flywheel put into discharge cannot meet the load demand, the number of flywheels put into discharge and the output current command value of each flywheel need to be recalculated.
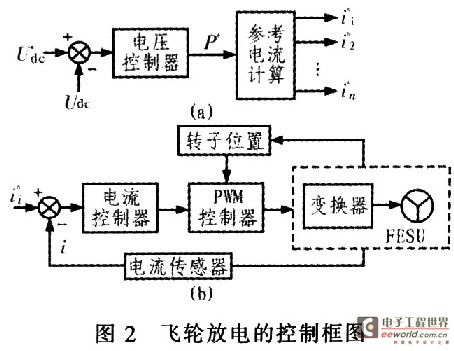
The serial numbers of the flywheels that have entered the discharge state are increased by 1, and then return to 1) to recalculate. When the grid voltage returns to normal, the number of charge and discharge times of the flywheels that have entered the discharge state is increased by 1. Based on the above analysis, the control block diagram of flywheel discharge is shown in Figure 2.
2.3 DVR converter control
The output of the compensation voltage needs to achieve two goals at the same time: high dynamic response speed and high stability accuracy. Feedforward control can significantly improve the dynamic response speed of the system and shorten the time for the compensation voltage to be issued. Feedback control can improve the stability margin of the system. Therefore, a composite control strategy consisting of feedforward control, voltage instantaneous value and filter capacitor current instantaneous value feedback control is adopted.
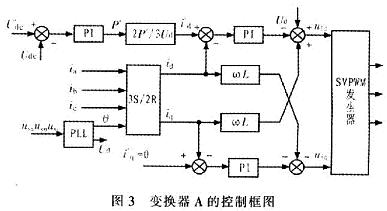
2.4 Control of Converter A
The control purpose of converter A is to control the DC bus voltage to be constant while achieving sinusoidal input current on the AC side and making it in phase with the grid voltage.
The converter equation in the Abe three-phase stationary coordinate system is:
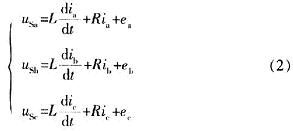
Where L is the inductance of the filter inductor connected to the grid, the equivalent resistance of the power switch tube loss and the equivalent resistance of the filter inductor are combined into R, usa, usb, usc are the three-phase voltages of the grid, ia, ib, ic are the three-phase currents on the AC side of the converter, and ea, eb, ec are the three-phase voltages output by the converter.
The mathematical model is converted into a synchronous rotating coordinate system through coordinate transformation. The mathematical model of the converter in the synchronous rotating coordinate system is:
Where ud and uq are the projections of the three-phase grid voltage in the synchronous rotating coordinate system; id and iq are the projections of the three-phase current on the AC side of the converter in the synchronous rotating coordinate system.
The d-axis of the synchronous rotating coordinate system is selected to coincide with the voltage vector of phase a of the power grid, then uq=0, and equation (3) can be further simplified as:
This means that when the grid voltage is stable, controlling the converter d-axis current means controlling the input active power; controlling the converter q-axis current means controlling the input reactive power. To achieve unity power factor control, that is, the input reactive power is zero, just set the converter q-axis current to a set value
![]() .
.
It can be seen from formula (4) that there are cross-coupling terms in this mathematical model, which makes it difficult to design the controller. Therefore, a feedforward decoupling control strategy is adopted. When the current regulator adopts a PI controller, the control equations of uid and uiq are as follows:
Where, Kp and Ki are the current inner loop proportional coefficient and integral coefficient;
![]() is the current command value.
is the current command value.
Substitute equation (5) into equation (4) and simplify it to get:
Equation (6) realizes the decoupling control of the current inner loop. Based on the above analysis, the control block diagram of converter A is shown in FIG3 .
[page]
3 Simulation Results
Matlab/Simulink is used to simulate the proposed topology and control strategy. The main parameters of the system are shown in Table 2. FESA is composed of two FESUs in parallel.
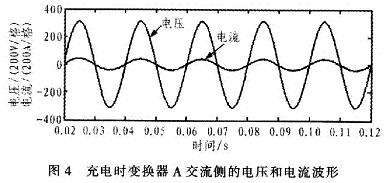
3.1 Flywheel charging status
Figure 4 shows the voltage and current waveforms on the AC side of converter A during flywheel charging. It can be seen from Figure 4 that the current and voltage are in phase, achieving current-to-voltage power factor control. Figure 5 shows the phase current waveform of motor A during flywheel charging. The phase current waveform is a square wave, and during the commutation process, the phase current has certain fluctuations.
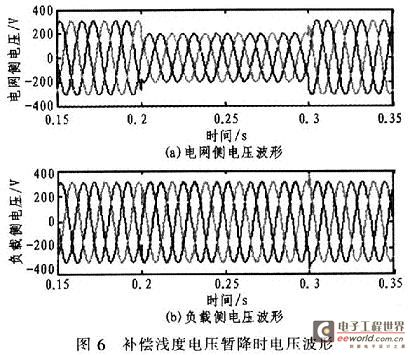
3.2 Shallow voltage sag compensation status
In the shallow voltage sag compensation state, the energy is provided by converter A. FIG6 shows the dynamic compensation waveform during voltage sag, from which it can be seen that the system compensation has a fast dynamic response speed and has good stability and tracking performance.
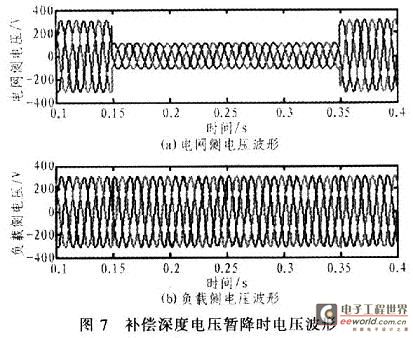
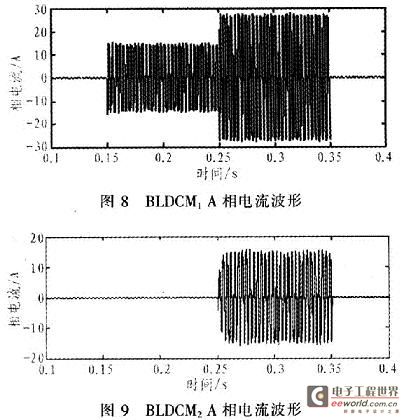
3.3 Deep voltage sag compensation status
In the deep voltage sag compensation state, the energy is provided by the flywheel. Figure 7 shows the dynamic compensation waveform. Figures 8 and 9 are the phase current waveforms of the motor during the flywheel discharge process. Between 0.15 and 0.25 s, BLDCM1 is in the discharge state; at 0.25 s, the load suddenly increases and both flywheels enter the discharge state.
4 Conclusion
In order to overcome the shortcomings of traditional dynamic voltage restorers and flywheel energy storage units, a new type of DVR based on flywheel energy storage array is proposed, which can compensate for deep voltage sags; the control strategy of flywheel energy storage array operating in the discharge state is studied, and a new discharge control strategy is proposed. The proposed system is simulated and analyzed using Matlab/Simulink, and the simulation results show the correctness and effectiveness of the proposed topology and control strategy.
2010/8/7 8:57:45 2010/8/7 8:57:45
Previous article:Unregulated power supply pulse charger based on DS2770
Next article:Design of RC Snubber Circuit in Switching Power Supply
- Popular Resources
- Popular amplifiers
 Research on Data Migration Strategy Based on DPB+-Tree
Research on Data Migration Strategy Based on DPB+-Tree Voltage and current sampling solution for motor control
Voltage and current sampling solution for motor control Modern Robotics: Mechanics, Planning, and Control
Modern Robotics: Mechanics, Planning, and Control [High Precision Laboratory] Operational Amplifier: 2 Input Offset Voltage and Input Bias Current
[High Precision Laboratory] Operational Amplifier: 2 Input Offset Voltage and Input Bias Current Designs powered by PMBus power to ASIC, FPGA and DDR voltage rails
Designs powered by PMBus power to ASIC, FPGA and DDR voltage rails TI-RSLK Module 2 - Voltage, Current and Power
TI-RSLK Module 2 - Voltage, Current and Power





- MathWorks and NXP Collaborate to Launch Model-Based Design Toolbox for Battery Management Systems
- STMicroelectronics' advanced galvanically isolated gate driver STGAP3S provides flexible protection for IGBTs and SiC MOSFETs
- New diaphragm-free solid-state lithium battery technology is launched: the distance between the positive and negative electrodes is less than 0.000001 meters
- [“Source” Observe the Autumn Series] Application and testing of the next generation of semiconductor gallium oxide device photodetectors
- 采用自主设计封装,绝缘电阻显著提高!ROHM开发出更高电压xEV系统的SiC肖特基势垒二极管
- Will GaN replace SiC? PI's disruptive 1700V InnoMux2 is here to demonstrate
- From Isolation to the Third and a Half Generation: Understanding Naxinwei's Gate Driver IC in One Article
- The appeal of 48 V technology: importance, benefits and key factors in system-level applications
- Important breakthrough in recycling of used lithium-ion batteries






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- 03. Light up the LED and test the buttons
- 7.4V battery charge management IC?
- TI z-stack's OSAL multi-task scheduling mechanism
- Help
- Sensor question
- [National Technology Low Power Series N32L43x Review] 1. Development Board Unboxing
- MOS tube smokes directly
- How to solve the motor efficiency and temperature rise problems caused by motor controllers
- Getting Started with the MSP432P401R Clock
- Fudan Micro MCU product introduction and selection table






 京公网安备 11010802033920号
京公网安备 11010802033920号