Applying modern virtual instrument technology to the field of motor performance and testing can give full play to the characteristics of high development efficiency, flexibility, strong compatibility and high reusability of virtual instrument technology. Designed and implemented an online test system for multi-channel parallel motors; used PID control algorithm to control calibration parameters, and realized remote sharing of test data and remote control of the test system by users through TCP/IP protocol.
With the rapid development of computer technology, computer-aided test (CAT) systems have become popular in the motor industry. After the introduction of modern virtual instrument technology into the field of motor testing, the virtual instrument application software combines the computer with the standardized virtual instrument hardware, realizing the softwareization and modularization of traditional instrument functions, thus achieving the purpose of automatic testing and analysis, greatly shortening the system development cycle and reducing the system development cost.
The motor performance virtual instrument test system designed in this paper is completed by using National Instruments' LabVIEW and LabVIEW RT virtual instrument software platforms and its supporting PCI, SCXI and compactFieldPoint (cFP) virtual instrument hardware. The system realizes the parallel test of multi-channel power tool performance; it can automatically complete the power tool load control and real-time monitoring of torque, speed, power and body temperature; and it realizes the remote sharing of test data and the remote control of the test system by users through TCP/IP protocol.
1 System composition and working principle
1.1 System composition
The motor performance virtual instrument test system mainly consists of four parts: a main control computer, a real-time monitoring module, a dynamometer, and a motor to be tested, as shown in Figure 1.
The main control machine is a workstation that provides a graphical user interface, completes the configuration and setting of the system hardware and software, and updates the waveform display of each index parameter against time and the motor characteristic curve after curve fitting in real time, and finally completes the recording of test data. At the same time, the main control machine also completes the measurement of non-control parameters (such as input voltage and working current) through the embedded PCI data acquisition card.
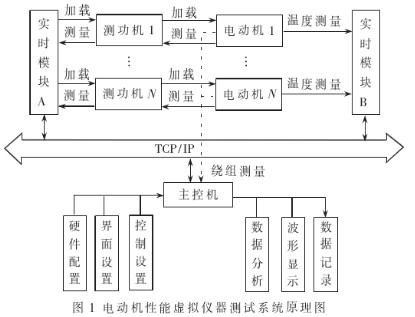
The real-time monitoring module consists of two sets of cFP distributed I/O systems, which communicate with the main control computer through the TCP/IP protocol, obtain control commands from the main control computer to control the dynamometer, and hand over the data collected from the dynamometer to the main control computer for processing. Among them, module A is used to complete the measurement of real-time automatic loading and control index parameters, and provide emergency measures such as overload protection, emergency stop, and system reconstruction after illegal shutdown; module B is used to monitor the surface temperature of the motor to be tested in real time.
There are two types of dynamometers: hysteresis dynamometers and magnetic powder dynamometers, which are used to provide load for the motor to be tested. The internal sensor equipment converts the torque, speed, output power and other test parameters of the motor to be tested under the load into voltage signals that can be received by the cFP real-time monitoring module A.
1.2 Working Principle
The motor performance virtual instrument test system can run in two working modes: automatic working mode and manual working mode. The main test items are: input voltage, input current, input power, torque, speed, output power, body surface temperature, body internal temperature, etc.
In the automatic working mode, the main control machine first waits for the user to complete the setting and configuration of the software and hardware, and then asks the user to select load test or fixed parameter test. Under load test, the user needs to set test parameters such as load curve, load time, cycle time and test time; under fixed parameter test, the user can choose to specify torque, speed or power, and set the corresponding calibration parameters, control parameters and test time. After completing the above steps, you can start the test program, and the test system will automatically load according to the load set by the user, and complete the performance test of the motor to be tested; or maintain the stability of the calibration parameters through a certain control algorithm, and automatically test the motor to be tested in this state. While the system is running, the user can observe the waveform display of each index parameter against time and the motor characteristic curve obtained after curve fitting in the real-time monitoring chart, and can export the chart of interest to save. When the test time is up, the system automatically terminates the test.

In manual working mode, the system working principle is basically similar to that in automatic working mode, except that the system does not perform cyclic testing, but provides an interactive testing environment; after completing the specified test items, it waits for further operation from the user.
2 Hardware Structure
The hardware block diagram of the motor performance virtual instrument test system is shown in Figure 2.
2.1 Main control machine
The main control machine is a workstation with a built-in PCI-6052 multi-function data acquisition card and a PCI-4070 high-precision flexible digital multimeter card. The PCI-6052 multi-function data acquisition card is equipped with two SCXI-1120 signal conditioning cards and a matching SCXI-1327 attenuation terminal in front of it, which is used to collect input signals of the working voltage and working current of multiple motors to be tested; the PCI-4070 high-precision flexible digital multimeter card is equipped with a SCXI-1127 multi-channel switch card and a matching SCXI-1331 multi-channel wiring terminal in front of it, which is used to scan the rotor windings of multiple motors to be tested and measure the internal rotor temperature of the motor according to the corresponding algorithm.
2.2 Real-time monitoring module
The real-time monitoring module uses the cFP distributed I/O real-time system, which has units such as FIFO data queue, power-off data cache, watchdog status monitoring, as well as high impact resistance and high anti-interference characteristics, to complete the system's core real-time acquisition and control functions.
cFP-2020 is used as the real-time system controller, which supports Lab-VIEW RT real-time module. It can run the application downloaded to the controller memory independently in real time without LabVIEW programming environment, and realize network sharing of test data through the embedded 10/100Base TX Ethernet interface of the controller.

cFP DI-330 is used to respond to the emergency stop switch and emergency shutdown system to prevent accidents; cFP DO-403 is used to control the solid-state relay SSR connected to each motor to be tested to close or open the working circuit; cFP AO-210 is used to provide a loading signal for the dynamometer, control the load borne by the motor to be tested, and test the motor under this load; cFP AI-210 is used to collect the voltage signal representing the torque output by the dynamometer, and then measure the actual torque of the motor to be tested; cFP-CTR-502 is used to collect the TTL level signal representing the speed output by the dynamometer, and then measure the actual speed of the motor to be tested.
2.3 Real-time temperature measurement module
The real-time temperature measurement module also uses the cFP distributed I/O real-time system. It uses the cFP-2020 controller and is equipped with four cFP TC-120 8-channel thermocouple modules. It can be directly used to measure standard J-type thermocouples and provide corresponding signal conditioning, input noise filtering, cold end compensation, and thermocouple temperature algorithms. It is used to implement front-end data sampling at the working end of the motor and use the network sharing function of the distributed I/O based on the TCP/IP protocol to achieve remote data sharing.
2.4 Dynamometer
The dynamometer is designed based on the principle of balance between action and reaction. When the motor under test rotates and drives the rotor of the dynamometer to rotate, the dynamometer rotor cuts the magnetic lines of force to generate armature current, and interacts with the magnetic flux to generate braking torque; at the same time, the dynamometer stator is subjected to a torque in the opposite direction, which generates compressive stress on the dynamometer sensor shaft. By pasting a resistance strain gauge on the sensor shaft and then connecting the strain gauge to a certain bridge circuit, the change in compressive stress can be converted into a voltage signal, thereby measuring the magnitude of the torque.
The motor speed is measured using a photoelectric speed sensor. A disk with N evenly distributed sawtooth edges is installed on the motor shaft to project light onto the photosensitive tube. When the motor rotates one circle, N pulse signals are obtained. By measuring the frequency or period of the pulse signal, the motor speed can be obtained.
Two types of dynamometers are used here: hysteresis dynamometer and magnetic powder dynamometer. The torque measurement range of the hysteresis dynamometer is relatively small, with a maximum torque of 10N.m, but the speed is large, with a maximum speed of 12000rpm; the torque measurement range of the magnetic powder dynamometer is large, with a maximum torque of 20N.m, but the speed measurement range is small, with a maximum speed of 4000rpm. The two types of dynamometers complement each other and can be applied to various types of motor performance tests.


Previous article:What is virtual instrument technology and why do you choose it?
Next article:Application of FPGA in Virtual Instrument Design
- Popular Resources
- Popular amplifiers
 5962-00-548-2018
5962-00-548-2018




- Seizing the Opportunities in the Chinese Application Market: NI's Challenges and Answers
- Tektronix Launches Breakthrough Power Measurement Tools to Accelerate Innovation as Global Electrification Accelerates
- Not all oscilloscopes are created equal: Why ADCs and low noise floor matter
- Enable TekHSI high-speed interface function to accelerate the remote transmission of waveform data
- How to measure the quality of soft start thyristor
- How to use a multimeter to judge whether a soft starter is good or bad
- What are the advantages and disadvantages of non-contact temperature sensors?
- In what situations are non-contact temperature sensors widely used?
- How non-contact temperature sensors measure internal temperature






- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
- Wi-Fi 8 specification is on the way: 2.4/5/6GHz triple-band operation
- Wi-Fi 8 specification is on the way: 2.4/5/6GHz triple-band operation
- Vietnam's chip packaging and testing business is growing, and supply-side fragmentation is splitting the market
- Vietnam's chip packaging and testing business is growing, and supply-side fragmentation is splitting the market
- Three steps to govern hybrid multicloud environments
- Three steps to govern hybrid multicloud environments
- Microchip Accelerates Real-Time Edge AI Deployment with NVIDIA Holoscan Platform
- Microchip Accelerates Real-Time Edge AI Deployment with NVIDIA Holoscan Platform
- Melexis launches ultra-low power automotive contactless micro-power switch chip
- Melexis launches ultra-low power automotive contactless micro-power switch chip
- This week's review information, freshly arrived!
- CCS cannot build its own platform
- Qorvo Boosts Performance with Powerful New Multi-Time Programmable PMIC
- TMS320F28335 Interrupt Management Module PIE
- CC2640R2: How to use the chip's internal Bootloader to burn the program
- Proteus emulation of micropython method
- What is the principle of the reading pen? How does it improve the accuracy of reading?
- Where is the lucky star? ——"Keysight Technology Double 11 Instrument Flash Sale"
- My design is equivalent to changing the original manual control to automatic control. The overall design idea is as follows, but at this stage it is still...
- Play with the Internet of Things and make a smart greenhouse model!






 京公网安备 11010802033920号
京公网安备 11010802033920号