TI eSMO library Fsmopos and Gsmopos parameter analysis
[Copy link]
Author: Hardy Zhou
In terms of motor sensorless control algorithm, TI provides eSMO sliding mode observer to calculate the motor rotor angle. In terms of application, TI provides eSMO lib file and related documents to explain the use of eSMO, but in the process of use, it may not be possible to understand the meaning of Fsmopos and Gsmopos from the related documents, which is not convenient for debugging. Therefore, this article mainly derives the TI eSMO current calculation formula, and derives the Fsmopos and Gsmopos (referred to as F and G respectively) formulas. At the same time, we can see the difference between TI's calculation and other F and G calculation methods from the derived formula, which deepens our understanding and proficient application.
The mathematical model of PMSM in the stationary α and β coordinate system is as follows:
 (1) (1)
查看详情
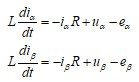
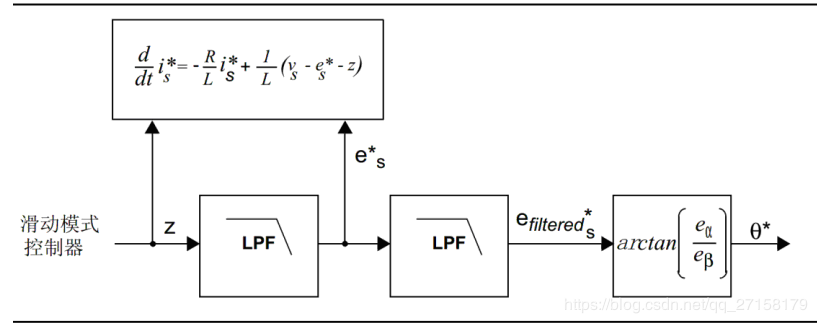
The structural mathematical model of TI eSMO sliding mode observer is as follows
查看详情
From the structural point of view, it is relatively clear and straightforward. The switch switching function is used to estimate the back electromotive force, thereby obtaining the motor rotor angle.
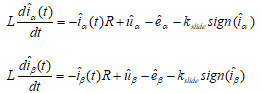
Thus we can get the following observer expression
查看详情
in
查看详情
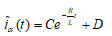
Based on the above formula, we solve the eSMO current on the α axis, and similarly we can get the β axis current formula.
查看详情
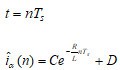
The solution of the current in the time domain is:
查看详情
The current solution corresponding to discrete time Ts is
 (1) (1)
So we get:
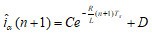 (2) (2)
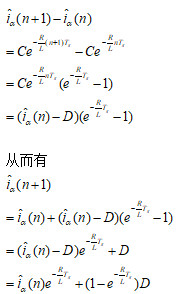
(2) – (1) gives
查看详情
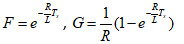
So we can get
查看详情
Note: If the discrete time Ts is small enough,  an approximation can be used. an approximation can be used.
Then there is
查看详情
This works just like any other expression in non-exponential form.
|  提升卡
提升卡 变色卡
变色卡 千斤顶
千斤顶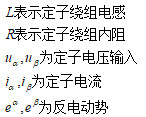{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




 京公网安备 11010802033920号
京公网安备 11010802033920号
