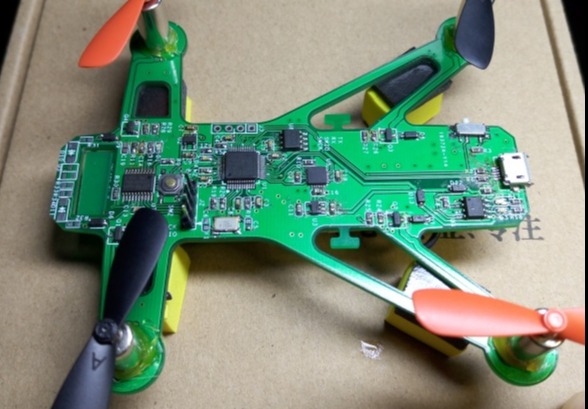
**1. Introduction to the work** (purpose, purpose and significance)**** ****The concept of drones (four-axis, multi-axis aircraft) is very popular now, from the tall DJI to the remote control in the toy city From toys to various well-known open source four-axis models, it seems that if you don’t talk about four-axis in the model circle, you will be out. I used to play video games, but recently I followed the trend and started four-axis. I was really itchy when I saw the various four-axis racks on Xobao. I happened to be wandering around and found a post about the AFHDS protocol analysis by Aiwei Xiao4-axis and Senior Cheesecake. I happened to have an AFHDS-compatible FS-TH9X remote control, so I came up with the idea of making my own four-axis. **** **** The rapid popularity of four-axis or drones is inseparable from their open source nature. Just like Linux, only when everyone works together can they develop quickly. With the development of four-axis to this point, it is really difficult for me to come up with any innovations in this work. I just integrate some resources to form an interesting platform or toy, introduce it to the majority of electronic players, and expand the scope of four-axis play. Axis people, so that the drone business can prosper (it seems to be a bit high). **** ******** ******2* ***. Highlights of the work** (please write down if there are any) 1. The appearance is relatively novel. The outer frame refers to kingkong’s indoor traversing rack, which seems to break the stereotyped X-shaped and H-shaped shapes of the traditional four-axis. 2. Adopt PCB integrated design, which means that the flight control board and the frame are integrated, and the PCB board is the frame. It makes full use of the lightweight and high-strength characteristics of the fiberglass board to significantly reduce costs. 3. The motor adopts 8520 hollow cup brush, which is more powerful and can play time travel. 4. The flight control part adopts the mature OpenPilot, which makes debugging easier and the performance more stable. **3****, system architecture diagram** Functional framework diagram **4* ***, schematic** Source file: [HW.zip](http://club.szlcsc.com/article/downFile_B5B836F8575EC5B9.html) (Number of downloads: 530) Flight control computer: This part is the control core, the microcontroller Using STM32F103CBT6, typical peripheral configuration. It is connected to the receiver module through PWM signals in\_s1~in\_s6 and is used to receive 6-channel commands from the remote control. The SPI interface is used to communicate with the gyroscope to collect attitude information. Output 4 PWM signals to the motor drive module to drive the motor. The USB port is used for debugging, firmware upgrade and charging. In addition, the external m25p16 (EPCS4 in the picture) is used as parameter storage flash. Six-axis gyroscope: The gyroscope uses MPU6000 with typical peripheral configuration. The interface will not be described in detail. Receiver: This module contains the A7105 wireless module and the microcontroller STM32F030F4P6, which jointly parse the instructions from the remote control, and then convert them into PWM signals and transmit them to the flight control computer. The SPI port and GPIO are used to communicate between the 7105 and the microcontroller. It is also equipped with a key switch sw2 for pairing. Power management, high-rate lithium battery: The aircraft can be powered by USB and lithium battery. When debugging, it is powered by USB, and when the motor is running, it is driven by lithium battery (it is strictly prohibited to use USB power to drive the motor). On the one hand, the 5V from USB charges the lithium battery through TP4056, and on the other hand, it supplies the flight control computer, gyroscope, and receiver through Schottky diode D12. When the USB is unplugged, the flight control computer, gyroscope, and receiver are powered by lithium batteries and D13. The flight control computer and receiver use an LDO to stabilize the voltage. To ensure clear signals, the gyroscope is powered by a separate LDO. The enable pins of the two LDOs are controlled by a toggle switch sw1 to turn them on and off. The motor driver adopts MOSFET low-side direct drive and is equipped with 5817 as a freewheeling tube. **5****, bill of materials (BOM list)** [QC\_zen\_BOM.zip](http://club.szlcsc.com/article/downFile_BD2BFDA4DC8DE8C2.html) (Number of downloads: 538) ** 6****, PCB physical picture**  **7****, software Part of the description ** (Extended options, optional) [FSrx\_SWSPI\_build1113.zip](http://club.szlcsc.com/article/downFile_1D0069D4E4F01E72.html) (Number of downloads: 803) The entire source code of the receiver is disclosed. Some of it comes from the cheesecake. The content is easy to understand, please digest and absorb it by yourself. For some source codes of the flight control machine, go to the official website of openpilot to download the latest version. I won’t go into details here **8****, work demonstration** (extension options, you don’t have to write). Please refer to my video post **9****, summary** 1. During the competition, the eldest daughter was two years old, and the second daughter and half were Years old, every day I have to wait for the children to go to sleep before I can work. My wife also gave me a lot of support. She also helped me record videos and solder boards. Where can I find such a wife? 2. The receiver software debugging was full of twists and turns. ST’s native SPI driver was incompatible with the 7105, so we had to use software to simulate SPI. After solving this problem, I discovered that there were two serial signals in the 6 output channels. I was also drunk, so I temporarily skipped the faulty channel due to limited time, and made do with the remaining 5 channels. 3. Originally, the 716 motor was used, but it couldn’t fly at all. Later, I decisively changed to the 8520 motor. It was so powerful that it was simply violent. Watch the video experience for yourself. 4. The organizer organized a very good event this time. By participating in this event, I fully experienced the one-stop service provided by Lichuang to us electronic enthusiasts. The key is that the price is very reasonable! The quality is very reliable! The experience was perfect! This is the legendary Internet maker e-commerce platform! I hope Lichuang’s business will be prosperous! **For more project details, please see the link: **[http://club.szlcsc.com/article/details\_434\_1.html](http://club.szlcsc.com/article/details_434_1.html) # #### **This project is owned by Lichuang Community "**arokh**"**







 京公网安备 11010802033920号
京公网安备 11010802033920号

 180-040NF04-11026PN
180-040NF04-11026PN



