1 Introduction
With the development of science and technology and the continuous improvement of demands, radar systems have become more and more complex and there are more and more types. The design, monitoring and maintenance of complex systems have become increasingly difficult. It is under such circumstances that radar simulation has become an effective means to solve this series of problems. Radar system simulation is the product of a combination of digital technology and radar technology, and has the advantages of flexibility and economy. Using software to build models that meet user needs is different from physical models that are easily constrained by environmental, material, technical and other conditions and have good controllability.
Radar target simulation is an important part of radar system simulation. The radar target signal can be regarded as the recurring waveform of the transmitted waveform after delay and Doppler frequency shift, and the waveform amplitude is modulated by the two-way lobe of the antenna pattern. Using the high-speed computing performance of DSP, the target echo signal can be realized Calculate output in real time.
2 Simulation of radar target echo
2.1 Point target echo signal
Since the size of the radar target to be simulated in this article is smaller than the radar resolution unit, this target is regarded as a point target. Let the radar transmission signal be expressed as:
![]()
where u(t) is the complex modulation function and f0 is the carrier frequency.
Then the video signal of the target echo can be expressed as: after being simplified by the constant Doppler theory:
![]()
where τ is the round-trip delay of the echo signal, fd is the Doppler frequency shift of the target echo,
![]() .
.
The above formula is applicable to the point target situation of v<<c, BT<<c/2v.
2.2 Coherent video simulation of point target echo
The coherent video signal of the target echo refers to the signal output by the target echo signal after coherent demodulation by the radar receiver, which can be expressed as:
![]()
The above equation does not consider the additional phase shift caused by the complex reflection coefficient γ. Without considering τ and the additional fixed phase term exp (-j2πfoτ) caused by τ, the above equation can be simplified to:
![]()
Assume that the coherent pulse radar pulse repetition interval is T and the polyphonic function u(t)=a(t)exp[jθ(t)], then the coherent video signal sampling of the point target echo can be expressed by its orthogonal component as:

Among them, k represents the sampling number, θ(kT) is the initial phase of the target echo, which can be taken as 0 during calculation. All information of the radar point target echo is included in these two orthogonal components. fd is the Doppler frequency shift of the target at that point; a(kT) is the inclusive function of the complex modulation function of the radar transmission signal, A(kT) =  , γ is the complex reflection coefficient, and its relationship with the radar cross-sectional area σ is
, γ is the complex reflection coefficient, and its relationship with the radar cross-sectional area σ is ![]() , Eq. φ represents the additional phase shift of the reflected signal. The radar cross-sectional area is not only related to the target's size, reflection characteristics and other characteristics, but also affected by the target's undulation characteristics. The radar cross-sectional area here adopts the swelling model. λ is the radar wavelength, R is the distance between the target and the radar, G is the radar unilateral power gain affected by the antenna pattern, and L is the system loss factor.
, Eq. φ represents the additional phase shift of the reflected signal. The radar cross-sectional area is not only related to the target's size, reflection characteristics and other characteristics, but also affected by the target's undulation characteristics. The radar cross-sectional area here adopts the swelling model. λ is the radar wavelength, R is the distance between the target and the radar, G is the radar unilateral power gain affected by the antenna pattern, and L is the system loss factor.
Therefore, the digital simulation of radar echo mainly simulates the amplitude A (kT) and Doppler frequency shift fd of the target.
2.3 Antenna modulation
Monopulse tracking radar uses sum and difference beams to track targets. The antenna of this radar system has four partially overlapping sub-beams in an angular plane, as shown in Figure 1.

The four sub-beams respectively perform amplitude modulation on the received target echo to obtain four signals. The radar performs sum and difference processing on these four signals. From the size of the difference signal, the target position (azimuth angle, pitch angle) and antenna can be obtained. The deviation error of the center pointing can be adjusted to achieve target tracking. From the beam cross-section direction, the center positions of the four beams are shown in Figure 1, where the origin is the antenna axis, the α axis is the direction angle direction, and the β axis is the pitch angle direction. Assume that the target signal received by the four beams are A1, A2, A3, and A4, then the sum signal Σ, the azimuth difference signal Δα, and the pitch difference signal Δβ can be expressed as:
Σ=A1+A2+A3+A4
Δα=A2+A4-A1-A3
Δβ=A1+A2-A3-A4
The radar processes the echo signal according to the above formula, which can also be regarded as the result of sum and difference pattern modulation. Taking two beams as an example, the pattern of two sub-beams, sum beam, and difference beam is shown in Figure 2.
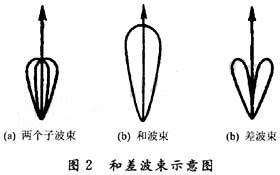
To simulate point target Σ, Δα, Δβ signals, the most direct way is to generate a Σ signal, and then use the sum and difference beam patterns shown in Figure 2 to modulate the data respectively, thereby obtaining Σ, Δα, Δβ signals, but A multi-channel structure must be used. If you think about it from another angle, use 4 precision attenuators to simulate the modulation of 4 sub-beams. After getting 4 channels of signals, use the above formula to calculate the Σ, Δα, Δβ signals. Then you can use only one target signal channel and output the data Then use an attenuator to generate Σ, Δα, Δβ signals. The target's trajectory can be calculated in real time by the DSP in the simulator according to the parameters transmitted by the host.
3 Simulation of target trajectory
Since the radar obtains discrete target signals, that is, target information obtained at a certain time interval T. When this time interval is small enough, a direct segment (or rotation) can be used to approximate the target's flight trajectory, and it can be considered that the target is moving at a uniform acceleration within such a small time interval. Therefore, any flight trajectory can be regarded as a combination of linear motion and uniform space circular motion.
According to the above two basic motion trajectories, many kinds of complex motion trajectories can be combined. Figure 3 is a composite trajectory realized by TMS320C6201 based on the combination of linear and circular motion.

4 Implementation based on TMS320C6201
4.1 Introduction to TMS320C6201
TMS320C6201 is a fixed-point digital signal processor launched by TI. The CPU contains 8 parallel processing arithmetic units with instructions up to 256b. It adopts an improved Harvard structure, that is, the program memory and data memory are set separately. The program memory is 512kb. Or as a Cache for external storage. The data memory is 512kb, the instruction cycle is 5ns, and the clock is 200MHz. Ideally, 8 instructions are executed at a time, so it can reach 1600MIPS. The integrated peripherals in the chip include: external memory interface EMIF, host port HPI, expansion bus XB, bootstrap control logic, multi-channel buffered serial port, timing, and interrupt selection. Sub, Power-down logic. Software design can use C language, assembly language and linear assembly language, etc.
4.2 Implementation based on TMS320C6201
Since the simulated radar echo signal has real-time requirements, a mixed programming method of C language and assembly language is used during the implementation process. The framework program is written in C language and has subroutines with high running speed requirements. It is written in assembly language, so this involves the interface conventions of mixed programming of C language and assembly language. Some of the interface conventions are summarized as follows:
(1) When the C function calls the assembler, the calling C program will automatically save the values of the A0-A9 and B0-B9 registers. The values of the other registers need to be saved manually if necessary. When returning, the values of the A0-A9 and B0-B9 registers will be saved. The values will be restored automatically, while the rest need to be restored manually;
(2) When the main C program calls the assembly function, the function parameter transfer follows the following rules: 8/16b parameters are stored in A4, B4, A6, B6, A8, B8, A10, B10, A12, B12 in sequence; if passed If the parameters are long type, double precision, etc. 32/64b, then the parameters are stored in a pair of parity registers, such as A5:A4, B5:B4, A8:A7, etc. When the number of parameters that need to be passed is more than 10, the extra parameters are placed in the stack.
(3) If the correct function return declaration is made in the C calling function, the called assembly function can return a valid value. If the return value is an integer or 32-bit floating point type, it is returned in register A4. If the return value is a double precision or long double precision type, it is returned in A5:A4. If the return value is a structure type, put the structure address in A3 and return.
(4) Any object declared in assembly language must be accessible in C, then it must be declared as an external variable in assembly language using .def or .global. Similarly, when you want to reference a C function or object in assembly language, you must declare the C object with .ref or .global, which will generate an external reference that is not defined in the assembly language function and is recognized by the linker.
Figure 3 shows one of the target trajectories achieved with TMS320C6201. By placing the entire system on the hardware platform for debugging, the required target trajectory, target Doppler frequency shift and target echo signal amplitude after antenna modulation can be obtained.
5 Target channel realization
The computer implements data interface through PCI interface card and simulator. The target data memory uses high-speed and large-capacity synchronous dynamic memory (SDRAM). SDRAM is mapped in the CE2 and CE3 spaces of the external memory space of TMS320C6201, EPROM is mapped in the CE1 space, and the input and output dual-port RAMs are mapped in the CE0 space.
The entire workflow is as follows:
(1) Set the aircraft height, aircraft speed, radar carrier frequency and target parameters in the host computer according to the radar debugging requirements, and pre-calculate the target data.
(2) The host sends the pre-calculated target data to the input dual-port RAM through the PCI interface, and then stores the data in the input dual-port RAM into the target SDRAM through TMS320C6201.

(3) After the host and TMS320C6201 send the target data into the memory, TMS320C6201 calculates the storage address of the target data based on the PRF value of the next frame, takes out a frame of target data from the address and sends it to the target amplitude output dual-port memory, and then The output dual-port memory is output to the subsequent stage circuit. The TMS320C6201 also outputs the attenuator control data according to the current beam pointing, modulates the antenna pattern of the target signal, and forms the target sum and difference signal.
(4) Digital and video output
The signal synthesis and output circuit synthesizes the target, clutter, and noise data to obtain the digital radar echo signal and directly outputs Σ, Δα, and Δβ digital signals. The video output is obtained by D/A conversion of the Σ, Δα, and Δβ digital signals.
6 Conclusion
This article briefly introduces the theory of radar video simulation, and introduces some conventions of mixed programming of C language and assembler. It analyzes the simulation of target trajectories and realizes various composite trajectories based on simple basic trajectories to more realistically reproduce reality. Movement of targets in the environment.
Previous article:A method to realize DSP online debugging using microcontroller
Next article:Real-time data acquisition system based on ADmC812 and DSP
- Popular Resources
- Popular amplifiers
 Dual Radar: A Dual 4D Radar Multimodal Dataset for Autonomous Driving
Dual Radar: A Dual 4D Radar Multimodal Dataset for Autonomous Driving- Huawei's Strategic Department Director Gai Gang: The cumulative installed base of open source Euler operating system exceeds 10 million sets
- Analysis of the application of several common contact parts in high-voltage connectors of new energy vehicles
- Wiring harness durability test and contact voltage drop test method
- Sn-doped CuO nanostructure-based ethanol gas sensor for real-time drunk driving detection in vehicles
- Design considerations for automotive battery wiring harness
- Do you know all the various motors commonly used in automotive electronics?
- What are the functions of the Internet of Vehicles? What are the uses and benefits of the Internet of Vehicles?
- Power Inverter - A critical safety system for electric vehicles
- Analysis of the information security mechanism of AUTOSAR, the automotive embedded software framework
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- [GD32F350/GD32E103] Build VSF-based WebUSB DFU using open source toolchain
- How to determine whether the power supply needs a PFC circuit?
- RFMD and Qorvo prototype boards vs. honeycomb heat sinks
- Is there any big guy who does MEMS process research and development? Please guide me
- Question about LED flashing (newbie question)
- Learn about vehicle-to-everything (V2X) technology in one article
- Evaluation of the domestic FPGA Gaoyun GW1N-4 series development board - Software Part 1
- R329 Zhouyi AIPU environment construction and simulation practice
- Current sensor circuit inquiry?
- How to quickly design a pulse oximeter? TI offers tips!






 京公网安备 11010802033920号
京公网安备 11010802033920号