Steer-By-Wire can obtain the relationship between the command target input of the driverless turning and the change of the steering wheel of the car without restraint, and can control the relationship between the steering mechanism and the driving needs, so that the vehicle can be adjusted. It directly controls the precise control of the path and direction of the autonomous driving.
1. Development of steer-by-wire Since the first modern steering system with a steering wheel was installed in a passenger car in 1894, the steering system has gone through five stages:
Early purely mechanical steering systems;
Ford first proposed the hydraulic power steering system;
Toyota's first electronic hydraulic power steering system;
A new generation of electric power steering;
Such as wire-controlled steering systems that are free from mechanical connections and front-wheel active steering systems with active steering functions.
1.1. Electronic Hydraulic Power Steering (EHPS)
The driver applies torque and angle to the steering wheel; The steering wheel drives the steering column to rotate; The steering column converts the rotation of the steering column into lateral linear motion of the steering gear rack through the gear rack mechanism connected to the steering gear at its bottom; The steering torque sensor detects that the driver has input the steering wheel torque; Based on the torque input by the driver, as well as information such as vehicle speed, the ECU calculates and controls the electric motor to drive the steering power pump to rotate and generate high-pressure fluid; The hydraulic pressure is transmitted to the hydraulic power steering gear through the steering oil pipe, and the hydraulic pressure pushes the piston of the double-acting hydraulic cylinder on the hydraulic power steering gear to generate pressure, which assists the lateral linear motion of the rack; The steering tie rods at both ends of the steering gear change the direction of the wheel by pushing or pulling the steering knuckle; A lateral force is generated between the wheel and the ground, and the vehicle turns.
1.2. Electric Power Steering (EPS)
The first is to assist the torque of the steering column, which is called C-EPS (Column-EPS); the second is to assist the gears in the rack and pinion mechanism at the bottom of the steering column, which is called P-EPS (Pinion-EPS); the third is to assist the linear motion of the rack on the steering gear, which is called R-EPS (Rack-EPS); and R-EPS can be divided into R-EPS, DP-EPS (dual pinion EPS) and BD-EPS (belt drive EPS) according to different transmission methods.

1.3. Steer-by-wire (SBW)
In a narrow sense, the SBW system refers specifically to a steering system without mechanical connection, which is a distinction made from the structure of the system. However, in terms of function, in a broad sense, any steering system that can decouple the driver's input and the front wheel angle can be considered an SBW system. Under this definition, the general structure is as shown below.
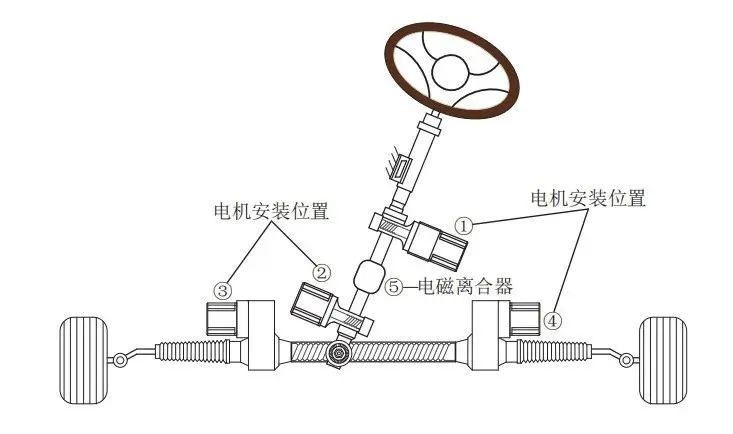
Among them, ① - ④ are possible installation positions of the motor, and ⑤ is the electromagnetic clutch. The electromagnetic clutch provides mechanical redundancy and can achieve mechanical decoupling of the steering wheel and the wheel. According to the presence or absence of ⑤, the SBW system can be divided into two categories: the SBW system with mechanical soft connection and the SBW system without mechanical connection. Therefore, people study the dual-motor safety redundant wire-controlled steering system. The scheme includes a steering control mechanism, a steering actuator, an electronic wire-controlled control network, a power supply system and various auxiliary structures. The scheme closely combines traditional mechanical steering with electronic control technology. The two modes of wire-controlled active steering and mechanical control steering can be switched arbitrarily through the electromagnetic clutch, and through fault identification, the mechanical control steering can be used as a backup for wire-controlled active steering to improve safety.
2. Main research contents of steer-by-wire
Currently, the research on steer-by-wire systems mainly focuses on three aspects: road feedback control strategy research, steering execution control strategy research, and fault diagnosis and fault-tolerant control strategy research.
2.1. Research on road feedback control strategy
Since the steer-by-wire system cancels the mechanical connection between the steering wheel and the steering wheel, and controls the steering of the wheel through the steering angle signal and the steering motor, the road feel cannot be directly fed back to the driver, which is absolutely not allowed from the perspective of driving safety. To address this problem, the steering wheel assembly of the steer-by-wire system includes a road feel simulation motor to generate a resistance torque acting on the steering wheel to simulate the road feel. Road feel is a relatively abstract definition. One of its definitions refers to the steering resistance torque obtained by the driver through the steering wheel during vehicle driving. The resistance torque mainly includes two parts: the return torque and the friction torque. Among them, the return torque is one of the main torques that restores the wheel to the straight driving position. The determination of its value is a difficult problem in vehicle design and is usually obtained by empirical, semi-empirical, statistical or experimental methods. The return torque is directly related to the force state of the front wheels of the vehicle, and the force on the front wheels is directly related to the real-time motion state of the vehicle and the adhesion of the road surface. Therefore, the steering wheel hand torque obtained by dividing the total return torque by the total force transmission ratio from the steering wheel to the front wheels is usually regarded as the road feel. According to current research, road feel is usually obtained by two methods: empirical design and model-based design. The empirical design method usually designs the road feel as a nonlinear function relationship of parameters such as steering wheel angle, vehicle speed, and yaw rate, providing different road feels for the driver under different conditions. It is simple and efficient, but has poor adaptability and accuracy. The dynamic model-based method establishes a related dynamic model by referring to the dynamic principles of road feel generated by traditional vehicles, calculates the tire force and friction torque related to the road feel according to the dynamic response of the vehicle, the driver's steering wheel input, etc., and finally calculates the road feel. To obtain the desired steering resistance torque, the remaining work is to control the road feel feedback motor to achieve the desired torque. The most commonly used algorithm is the PID algorithm.
2.2. Turning to implementation research
The steering execution control strategy of the SBW system can be divided into an upper strategy and a lower strategy. Among them, the upper strategy calculates the desired front wheel angle based on the current vehicle state and the driver's input while trying to meet the control objectives and constraints; while the lower strategy is that the steering controller controls the steering motor to execute the command and quickly and accurately reach the target angle. Due to the flexibility of the wire control system, many control algorithms have been derived. In general, the algorithms can be summarized into two categories: empirical design-based methods and dynamic model calculation-based methods. The empirical design-based method is mainly designed according to the different requirements of the vehicle for handling stability under different working conditions. Under low-speed conditions, the car should have a moderate steering wheel force that is not heavy and a steering wheel angle that is not too large, and should also have good self-centering performance; under high-speed and low lateral acceleration conditions, the car should have good yaw rate frequency characteristics, straight-line driving ability, self-centering performance and large steering sensitivity, and the steering wheel force should not be too small but should be maintained at a certain value to give the driver a stable road feel. The method based on dynamic model calculation aims to improve the stability of the vehicle. Therefore, some researchers attribute this method to vehicle stability control. The basic idea is to propose a control target based on the current vehicle state, external environment and driver input, and then calculate the reference front wheel angle based on the control target, control the front wheel angle to change the tire lateral force, and compensate for the yaw moment.
2.3. Fault diagnosis and fault-tolerant control
In wire-controlled steering, the power of steering comes from the motor, which mainly includes two aspects: it is used to provide the driver with road feel and power when steering. The reliability of the motor is the first factor that researchers must consider, and the fault tolerance of the motor and controller is very important. Real-time monitoring technology and setting redundant hardware are two means to ensure the stable operation of the controller, so fault-tolerant control can be achieved, and the quality of wire-controlled steering operation is guaranteed. According to the control relationship between the controller and the motor, relevant research can be conducted on the compensation control required when the motor fails, which provides the possibility of ensuring the reliability of wire-controlled steering to the greatest extent.
3.3. Application of steer-by-wire
From the perspective of the global competition landscape, international giants such as Bosch, ZF, JTEKT, NSK, and Nexteer have mature steer-by-wire products and technologies, but still encounter bottlenecks in commercialization.


Previous article:Xiaomi's autonomous driving technology: Algorithms
Next article:Welding and laser welding in the automotive industry
- Popular Resources
- Popular amplifiers
 LT1078SW
LT1078SW




- Sn-doped CuO nanostructure-based ethanol gas sensor for real-time drunk driving detection in vehicles
- Design considerations for automotive battery wiring harness
- Do you know all the various motors commonly used in automotive electronics?
- What are the functions of the Internet of Vehicles? What are the uses and benefits of the Internet of Vehicles?
- Power Inverter - A critical safety system for electric vehicles
- Analysis of the information security mechanism of AUTOSAR, the automotive embedded software framework
- Brief Analysis of Automotive Ethernet Test Content and Test Methods
- How haptic technology can enhance driving safety
- Let’s talk about the “Three Musketeers” of radar in autonomous driving
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
- From probes to power supplies, Tektronix is leading the way in comprehensive innovation in power electronics testing
- From probes to power supplies, Tektronix is leading the way in comprehensive innovation in power electronics testing
- Sn-doped CuO nanostructure-based ethanol gas sensor for real-time drunk driving detection in vehicles
- Design considerations for automotive battery wiring harness
- Do you know all the various motors commonly used in automotive electronics?
- What are the functions of the Internet of Vehicles? What are the uses and benefits of the Internet of Vehicles?
- Power Inverter - A critical safety system for electric vehicles
- Analysis of the information security mechanism of AUTOSAR, the automotive embedded software framework
- Brief Analysis of Automotive Ethernet Test Content and Test Methods
- How haptic technology can enhance driving safety
- [RVB2601 Creative Application Development] 5 Display letters AB at the same time, and eliminate them by long pressing and short pressing
- How to quickly test the continuity and sequence of wire harnesses using the ATX-100S wire harness tester?
- [FreeRTOS check-in station 5 opens] Interrupts and task switching, closing time is August 26
- How do satellite communications work from space?
- Important considerations in smart speaker design: pros and cons of design
- Domestic core TLSR8285 / TLSR8278 multi-protocol wireless chip
- Definition of priority order of MSP430 microcontroller interrupts
- Discuss power supply and design issues
- Introduction to the working principles of accelerometers and gyroscopes, and AlgoBuilder Tool
- Talking about Flyback Converter






 京公网安备 11010802033920号
京公网安备 11010802033920号