Digital home is the basic unit of the future intelligent community system. The so-called "digital home" is to provide intelligent services covering the entire family based on the home internal network, including data communication, home entertainment and information appliance control functions.
1 Introduction
One of the main contents of digital home design is the realization of communication function, including communication between the home and the outside world and communication between related facilities within the home. From the current development, external communication is mainly through broadband access to the Internet, while for communication within the home, the author adopts the currently more competitive Bluetooth wireless access technology.
Traditional digital home uses PC for overall control, which lacks humanization. Based on the idea of artificial emotion, the author designs an intelligent robot equipped with multiple external sensors, regards this intelligent robot as a family member, and controls the digital home through it.
This paper mainly designs a model for the application of intelligent robots in digital home health care, and uses Bluetooth technology to communicate with medical instruments and control PCs. The entire system has low cost, comprehensive functions, and a wide range of extended applications, and has great market potential.
2 Overall design of intelligent robot
2.1 Multi-sensor system of intelligent robot
The most important related field in robot intelligent technology is the integration and fusion of the robot's multi-sensory system and multi-sensory information, collectively referred to as the hardware and software parts of the intelligent system. The fusion of external sensors such as vision, hearing, force, and touch and the internal sensor information of each joint of the robot can enable the robot to complete important functions such as real-time image transmission, voice recognition, scene identification, positioning, automatic obstacle avoidance, and target detection; adding relevant medical modules (CCD, CAMERA, stereo microphone, image acquisition card, etc.) and special medical sensor components to the robot, plus a medical expert system, can realize medical care and remote medical monitoring functions. The block diagram of the multi-sensor system of the intelligent robot is shown in Figure 1.

2.2 Intelligent Robot Control System
The robot control system consists of two parts: one is the host computer, which is generally a PC, which completes the robot's motion trajectory planning, sensor information fusion control algorithm, visual processing, human-machine interface and remote processing tasks; the other is the slave computer, which generally uses a multi-chip microcomputer system or DSP as the core component of the controller to complete motor servo control, feedback processing, image processing, speech recognition and communication interface functions.
If a multi-chip microcomputer system is used as the lower computer, each processor completes a single task and completes the overall system function through information exchange and mutual coordination, but it is obviously lacking in signal processing capabilities. Since DSP is good at signal processing, and this intelligent robot often requires signal processing, image processing and voice recognition, DSP is used as the controller of the intelligent robot control system.
The control system uses DSP (TMS320C54x) as the core component and is composed of Bluetooth wireless communication, GSM wireless communication (supporting GPRS), motor drive, digital compass, sensory function sensors (visual and auditory, etc.), medical sensors and multiple-choice serial communication (RS-232) modules. The control system block diagram is shown in Figure 2.

⑴The system controls the movement of the robot through the drive motor and the steering motor. The steering motor uses the information of the digital compass as feedback for PID control.
⑵ Ericsson's ROK101007 circuit is used as the Bluetooth wireless communication module to realize the communication between the intelligent robot and the host PC and other medical and health care instruments based on Bluetooth modules.
⑶ The GSM wireless communication module supporting GPRS supports data, voice, short message and fax services, and communicates with the remote medical monitoring center using mobile phone communication.
⑷Since TMS320C54x has only one serial port, and the Bluetooth module, GSM wireless module, digital compass, and sensor modules such as vision and hearing all use RS-232 asynchronous serial communication, a multiple-select serial port communication module must be designed for conversion processing. When TMS320C54x needs data from the Bluetooth wireless communication module, it is enabled through the circuit; when TMS320C54x needs data from a certain sensor module, the last wireless communication module is turned off and the sensor module is enabled at the same time. In this way, each module completes the serial port communication with TMS320C54x.
3. Realization of main medical care functions
Intelligent robots can provide the following services for digital home healthcare:
⑴ Medical monitoring
Medical sensors integrated with Bluetooth modules can be used to detect the main physiological parameters of family members, such as electrocardiogram, blood pressure, body temperature, respiration and blood oxygen saturation, in real time, and the robot's processing system can provide local results.
⑵Remote diagnosis and consultation
Through the robot's visual and auditory sensory functions, the collected video, audio and other data are combined with various physiological parameter data to be transmitted to the telemedicine center. The medical center's experts conduct remote monitoring and combine the medical expert system to consult on the health status of family members, that is, provide services such as looking (video), smelling, asking (audio), and palpating (various physiological parameters).
3.1 Robot Vision and Video Signal Transmission
The video signals collected by the robot have two functions: providing robot vision; and transmitting the collected static images and dynamic images of family members to the telemedicine center.
The role of robot vision is to obtain the required information from the 3D environment image and construct a clear and meaningful description of the environment objects. Vision includes 3 processes:
⑴ Image acquisition: The 3D environment image is converted into an electrical signal through a visual sensor (CCDCAMERA for stereoscopic imaging).
⑵ Image processing: Image-to-image transformation, such as feature extraction.
⑶ Image understanding: Give an environmental description based on the processing.
[page]
Through the transmission of video signals, doctors at the telemedicine center can understand the physical and mental conditions of family members in real time. Intelligent robots capture images suitable for medical care and diagnosis according to the needs of doctors, and selectively transmit high-resolution and low-resolution images. In the process of medical care, there are two different conditions for image transmission:
⑴ When doctors observe the color of skin, lips, tongue, nails and facial expressions of family members, they need to transmit static high-definition color images; the method adopted is to transmit a high-definition static image at intervals (for example, 5 minutes).
(2) When doctors use dynamic images to check the body movement ability of family members, they can transmit images with lower resolution and smaller size. The method used is to perform reasonable compression and recovery to ensure real-time performance.
3.2 Robot hearing and audio signal transmitter
The audio signals collected by the robot also have two functions: one is to provide the robot with hearing; the other is that with the help of audio signals, family members can communicate with doctors, and doctors can understand the health status and mentality of family members. The transmission of audio signals provides a language communication channel for doctors to provide medical care to family members.
Robot hearing is a speech recognition technology. The medical care intelligent robot is equipped with various sound interaction systems. It can perform medical tests and monitoring according to the commands of family members. It can also do housework, control digital home appliances and take care of patients according to the commands of family members.
Multiple stereo microphones are used to acquire sound. Since the frequency range of sound is about 300Hz to 3400
Hz, sounds with too high or too low frequencies generally do not need to be transmitted. Therefore, doctors and family members can communicate normally by only transmitting sounds with a frequency range of 1000Hz to 3000Hz, thereby reducing the bandwidth occupied by the transmitted audio signal. The appropriate communication audio compression protocol can then meet the requirements of real-time audio. The hearing system of the intelligent robot is shown in Figure 3.

3.3 Collection and transmission of various physiological information
Traditional detection equipment is connected to the human body through wires to collect physiological information. Various connections can easily make patients nervous, resulting in inaccurate data. The use of Bluetooth technology can solve this problem well. Medical micro-sensors with Bluetooth modules are placed on family members to try not to interfere with normal human activities. The collected data is then transmitted to the receiving device through Bluetooth technology and processed.
A detector with a Bluetooth module is installed on the intelligent robot as a receiving device. Various medical sensors transmit the collected physiological information data to the detector through the Bluetooth module. The detector has two working modes: one is to hand over the data to the intelligent robot for processing and provide local results; the other is to connect to the Internet (it can also be sent back directly through the GSM wireless module) and transmit the data to the remote medical center through the network to achieve the purpose of medical care and remote monitoring. The transmission of video and audio data also adopts this method. The data transmission system of the intelligent robot is shown in Figure 4.

4 Application of Bluetooth module
4.1 Overview of Bluetooth Technology
Bluetooth technology is a short-distance wireless communication technology used to replace cables or wires. Its carrier uses the globally common 2.4GHz (actual RF channel is f=2402+k×1MHz, k=0,1,2,.,78) ISM band, and uses frequency hopping to expand the frequency band. The frequency hopping rate is 1600 hops/s, and 79 channels with a bandwidth of 1MHz can be obtained. Bluetooth devices use GFSK modulation technology, the communication rate is 1Mbit/s, the actual effective rate can reach up to 721Kbit/s, the communication distance is 10m, and the transmission power is 1mW; when the transmission power is 100mW, the communication distance can reach 100m, which can meet the needs of digital families.
4.2 Bluetooth Module
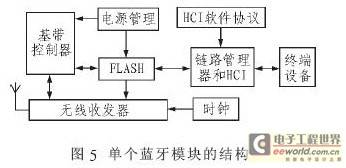
The ROK101007 Bluetooth module is a wireless baseband module suitable for short-distance communication launched by Ericsson. It has high integration, low power consumption (RF power is 1mW), supports all Bluetooth protocols, and can be embedded in any device that requires Bluetooth function. The module includes five functional modules: baseband controller, wireless transceiver, flash memory, power management module and clock, and can provide functions up to the HCI (host control interface) layer. The structure of a single Bluetooth module is shown in Figure 5.
4.3 Master/Slave Device Hardware Composition
Bluetooth technology supports point-to-point PPP (Point-to-Point Protocol) and point-to-multipoint communication, and uses wireless to connect several Bluetooth devices into a piconet. Each piconet consists of a master device (Master) and several slave devices (Slave), with a maximum of 7 slave devices. The master device is responsible for the actions of the communication protocol, and the MAC address is represented by 3 bits, that is, 8 devices can be addressed in a piconet (the number of interconnected devices is actually unlimited, but only 8 can be activated at the same time, of which 1 is the master and 7 are slaves). The slave device is controlled by the master device. All device units use the same frequency hopping sequence.
The micro medical sensor with Bluetooth module is used as the slave device, and the detector with Bluetooth module on the intelligent robot is used as the master device. The hardware of the master and slave devices mainly includes antenna unit, power amplifier module, Bluetooth module, embedded microprocessor system, interface circuit and some auxiliary circuits. The master device is the core part of the entire Bluetooth network. It must complete the conversion and information sharing between various communication protocols, as well as the data exchange function with the external communication network. It is also responsible for the management and control of each slave device.
5 Conclusion
With the progress of society, economic development and the improvement of people's living standards, more and more people need home health care services. The intelligent robot system for digital home health care services proposed in this paper has comprehensive functions, and its expanded applications in home intelligent robots, smart homes based on Bluetooth technology and digital hospitals are very broad, and has great market potential.
Previous article:Design of Pulse Signal Detection and Analysis System Based on LabVIEW
Next article:Research and design of monitoring system based on ARM architecture
- Popular Resources
- Popular amplifiers
 HI-8574PDIF
HI-8574PDIF




- High-speed 3D bioprinter is available, using sound waves to accurately build cell structures in seconds
- [“Source” Observation Series] Application of Keithley in Particle Beam Detection Based on Perovskite System
- STMicroelectronics’ Biosensing Innovation Enables Next-Generation Wearable Personal Healthcare and Fitness Devices
- China's first national standard for organ chips is officially released, led by the Medical Devices Institute of Southeast University
- The world's first non-electric touchpad is launched: it can sense contact force, area and position even without electricity
- Artificial intelligence designs thousands of new DNA switches to precisely control gene expression
- Mouser Electronics provides electronic design engineers with advanced medical technology resources and products
- Qualcomm Wireless Care provides mobile terminal devices to empower grassroots medical workers with technology
- Magnetoelectric nanodiscs stimulate deep brain noninvasively






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- The upcoming nrf52840 metro express development board
- Electronic Instrumentation and Electrical Measurement
- Working Principle of Solar Street Lights
- [RVB2601 Creative Application Development] + A Preliminary Study on Connecting to Alibaba Cloud
- [RVB2601 Creative Application Development] Practice 3 - External DHT11 Display of Temperature and Humidity
- MSA-AIAG-Manual 4
- LC filter circuit parameter design verification
- Qorvo UWB helps Shenzhentong enter the era of smart travel
- Turning off the general interrupt on M16C doesn't seem to work?
- Gesture recognition device based on FDC2214 sensor (MSP430)






 京公网安备 11010802033920号
京公网安备 11010802033920号