Through previous learning, we know that the microcontroller has ROM, RAM, and parallel I/O ports. So, in addition to these things, what else is inside the microcontroller? How are these bits and pieces connected together? Let us make a complete functional analysis of the registers inside the microcontroller!
As we can see in the figure below, there is a CPU inside the 51 single-chip microcomputer for calculation and control, four parallel I/O ports, namely P0, P1, P2, and P3, ROM for storing programs, RAM for storing intermediate results, timer/counter, serial I/O port, interrupt system, and an internal clock circuit. There are so many things inside a 51 single-chip microcomputer.
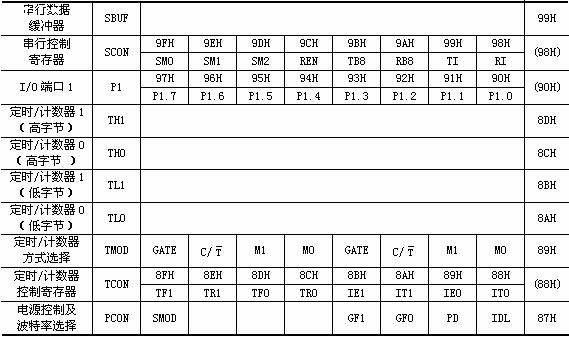
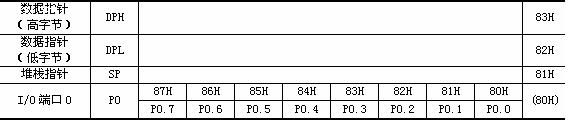
Further analysis of the above diagram shows that to read and write parallel I/O ports, we only need to send data to the latch of the corresponding I/O port. So how to use the timer/counter, serial I/O port, etc.? In the microcontroller, there are some independent storage units used to control these devices, which are called special function registers (SFRs). In fact, we have already come across the special function register P1. What else are there? See Table 1 below.
symbol | address | Features |
B | F0H | B Register |
ACC | E0H | accumulator |
PSW | D0H | Program status word |
IP | B8H | Interrupt Priority Control Register |
P3 | B0H | P3 port latch |
IE | A8H | Interrupt Enable Control Register |
P2 | A0H | P2 port latch |
SBUF | 99H | Serial port latch |
SCON | 98H | Serial port control register |
P1 | 90H | P1 port latch |
TH1 | 8DH | Timer/Counter 1 (upper 8 bits) |
TH0 | 8CH | Timer/Counter 1 (lower 8 bits) |
TL1 | 8BH | Timer/Counter 0 (upper 8 bits) |
TL0 | 8A | Timer/Counter 0 (lower 8 bits) |
TMOD | 89A | Timer/Counter Mode Control Register |
TCON | 88H | Timer/Counter Control Registers |
DPH | 83H | Data address pointer (high 8 bits) |
DPL | 82H | Data address pointer (lower 8 bits) |
SP | 81H | Stack Pointer |
P0 | 80H | P0 port latch |
PCON | 87H | Power Control Register |
Table 1
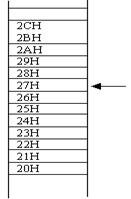
Next, we introduce several commonly used SFRs, see Figure 2. 1. ACC: Accumulator, often represented by A. You can't understand what it is from the name. It is a register, not a thing for adding. Why is it given such a name? Perhaps it is because one of the numbers must be in ACC when the arithmetic unit performs calculations. Its name is special and its identity is also special. Later we will learn about instructions and find that all calculation instructions are inseparable from it. 2. B: A register. It is used to store the multiplier or divisor when doing multiplication or division. It can be used as you wish when not doing multiplication or division. 3. PSW: Program Status Word. This is a very important thing. It contains many states of the CPU when it is working. Through this, we can understand the current state of the CPU and make corresponding processing. Please refer to Table 2 for its functions. D7 D6 D5 D4 D3 D2 D1 D0 CY AC F0 RS1 RS0 OV P Table 2 PSW is also called the flag register. It is very important to understand the principle of the microcontroller. It stores various related flags. Its structure and definition are as follows: Below we introduce the uses of each sfr one by one (1) CY: Carry flag. It is used to indicate whether Acc.7 has carried to a higher bit. The arithmetic unit in 8051 is an 8-bit arithmetic unit. As we know, an 8-bit arithmetic unit can only represent 0-255. If we add two numbers, the sum of two numbers may exceed 255, so the highest bit will be lost, causing an operation error. What should we do? The highest bit is carried here. This way, everything is fine. Example: 78H+97H (01111000+10010111) (2) AC: Auxiliary carry flag, also called half carry flag. It is used to indicate whether Acc.3 carries to Acc.4. Example: 57H+3AH (01010111+00111010) (3) F0: User flag. We (programmers) decide when to use it and when not to use it. (4) RS1, RS0: Working register group selection bits. We already know this. RS1, RS0 = 01 —— Area 1 (08H~0FH) RS1, RS0 = 10 —— Area 2 (10H~17H) RS1, RS0 = 11 —— Zone 3 (18H~1FH) (5) 0V: Overflow flag. Indicates that Acc overflows in signed arithmetic operations. We will discuss overflow later. (6) P: Parity bit: It is used to indicate the parity of the number of binary digits "1" in the ALU operation result. If it is an odd number, P = 1, otherwise it is 0. Example: The result of a certain operation is 78H (01111000). Obviously, the number of 1s is an even number, so P=0. 4. DPTR (DPH, DPL): Data pointer, which can be used to access any unit in the external data memory. If not used, it can also be used as a general register. It is up to us to decide how to use it. 16 bits, composed of two 8-bit registers DPH and DPL. Mainly used to store a 16-bit address as an address pointer to access external memory (external RAM and ROM). 5. P0, P1, P2, P3: As we already know, these are the registers of four parallel input/output ports. The contents in them correspond to the output of the pins. 6. SP: Stack pointer. (Specially used to point out the address of the top data of the stack.) Introduction to stacking: In daily life, we have all noticed this phenomenon: the dishes at home are stacked one by one, the latest one is placed on the top, and the earliest one is placed at the bottom. When taking things out, it is just the opposite, taking things from the top first. We can summarize this phenomenon in one sentence: "First in, last out, last in, first out". Please think about it, where else can we find this phenomenon? In fact, it can be found everywhere, such as the bricks and materials piled up on the construction site, and the goods in the warehouse, which are all "first in, last out, last in, first out". This is actually a rule for storing and retrieving items, which we call "stack". In a single-chip microcomputer, we can also construct such an area in RAM to store data. The rule for storing data in this area is "first in, last out, last in, first out", which we call a "stack". Why do we need to store data in this way? Can't the memory itself store data by address? Yes, knowing the address does allow us to know the content inside, but if we need to store a batch of data, wouldn't it be troublesome to know the address of each data? If we place the data one by one, then we only need to know the address unit of the first data (see Figure 2). If the first data is at 27H, then the second and third will be at 28H and 29H. Therefore, using a stack to store data can simplify operations. So where is the stack in 51? The area that can store data in the single-chip microcomputer is limited. We cannot allocate a place for the stack, so we open up a place in the memory (RAM) for the stack, but which part of the memory should be used? It is still difficult to decide, because 51 is a general-purpose single-chip microcomputer, and the actual needs of each person are different. Some people need more stacks, while others do not need so much, so no matter how to allocate it, it is not suitable. How to solve this problem? If it is not easy to divide it, just don't divide it. Give the right to divide it to the user (programmer) and decide it according to their own needs. Therefore, the position of the stack in the 51 single-chip microcomputer can change. And this change is reflected in the change of the value in SP. Look at Figure 2. The value in SP is equal to 27H, isn't it equivalent to a pointer pointing to the 27H unit? Of course, in the real 51 machine, the position pointed to by the pointer at the beginning is not the location where the data is stored, but the previous location where the data is stored. For example, if the pointer points to the 27H unit at the beginning, then the location of the first data is the 28H unit, not the 27H unit. Why is this the case? We will explain it when we learn the stack command. We will introduce other SFRs when they are used.

RS1, RS0 = 00 - Zone 0 (00H to 07H)
Previous article:Lesson 6: MCU parallel port structure
Next article:Lesson 8: MCU addressing mode and instruction system
Recommended ReadingLatest update time:2024-11-16 14:47

- Popular Resources
- Popular amplifiers
-
 Wireless Sensor Network Technology and Applications (Edited by Mou Si, Yin Hong, and Su Xing)
Wireless Sensor Network Technology and Applications (Edited by Mou Si, Yin Hong, and Su Xing) - Modern Electronic Technology Training Course (Edited by Yao Youfeng)
- Modern arc welding power supply and its control
- Small AC Servo Motor Control Circuit Design (by Masaru Ishijima; translated by Xue Liang and Zhu Jianjun, by Masaru Ishijima, Xue Liang, and Zhu Jianjun)
 Wireless Sensor Network Technology and Applications (Edited by Mou Si, Yin Hong, and Su Xing)
Wireless Sensor Network Technology and Applications (Edited by Mou Si, Yin Hong, and Su Xing)




 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- TouchGFX design by ddllxxrr
- As the party A, it's a bit painful...
- Internal structure of ESP8266 chip
- EEWORLD University ---- Tektronix uses mixed signal oscilloscope to explore the secrets of the bus
- Why choose 120Ω? The terminal resistance value recommended by the CAN standard
- Is there any sensor expert?
- About New Energy Vehicle Mode 2 IC-CPD Charging Gun Type A Leakage Current Sensor
- Help! What brand are the 2 UV sensors in the picture?
- Please tell me the pin definition of EPM7128S 100 pin. . . .
- BQ25120 Battery Management IC Problem Solving Sharing






 京公网安备 11010802033920号
京公网安备 11010802033920号