Recently, I have some free time, so I thought of making a PID design. I collected a lot of theories about PID control on the Internet, so I planned to use mega16L to make a PID test program. I found some unexpected errors. I wonder if you have encountered similar phenomena as mine: I defined a PID structure, and I couldn’t set the initialization value of each element to 0 during initialization (see the simulation diagram below). Moreover, some parameters in the PID structure should remain unchanged throughout the PID operation, but the parameters that should not change have changed during the PID operation. I don’t know why, and I still can’t find out the reason. Friends who are interested can join the discussion or friends with experience can give relevant help, thank you!
The detailed code and simulation are as follows: (My hardware system is the min Mega16/32 + JTAG ICE of this site)
Keywords:AVR
Reference address:PID control algorithm program based on AVR ATMega16
The detailed code and simulation are as follows: (My hardware system is the min Mega16/32 + JTAG ICE of this site)
- #include "config.h"
- struct _PID
- {
- float PVn; //feedback signal variable
- float SPn; //set value
- float Mn; //PID calculation result
- float Kc; //proportional coefficient
- float Ts; //sampling time (ms)
- float Ti; //Integral time (ms)
- float Td; //differential time (ms)
- float Mx; //Integral item adjustment parameter
- float PVn_1; //previous feedback variable
- float MPn; //result value of the proportional term
- float MIn; //Result value of integral term
- float MDn; //Result value of the differential term
- };
- struct _PID *myPID;
- void init_myPID(void);
- void init_ports(void);
- void init_device(void);
- float MPn_value(struct _PID *PID);
- float MIn_value(struct _PID *PID);
- float MDn_value(struct _PID *PID);
- float Mx_value(struct _PID *PID);
- float Mn_value(struct _PID *PID);
- void main (void)
- {
- init_device();
- init_myPID();
- myPID->SPn = 155.5;
- myPID->Kc = 13.2;
- myPID->Ts = 0.2;
- myPID->If = 600.0;
- myPID->Td = 0.0;
- myPID->PVn = 108.2;
- while(1)
- {
- myPID->MPn = MPn_value(myPID);
- myPID->MDn = MDn_value(myPID);
- myPID->Mx = Mx_value(myPID);
- myPID->MIn = MIn_value(myPID);
- myPID->Mn = Mn_value(myPID);
- myPID->PVn_1 = myPID->PVn;
- }
- }
- /******************************************************************************/
- void init_myPID(void)
- {
- myPID->PVn = 0.0;
- myPID->SPn = 0.0;
- myPID->Mn = 0.0;
- myPID->Kc = 0.0;
- myPID->Ts = 0.0;
- myPID->If = 0.0;
- myPID->Td = 0.0;
- myPID->Mx = 0.0;
- myPID->PVn_1 = 0.0;
- myPID->MPn = 0.0;
- myPID->MIn = 0.0;
- myPID->MDn = 0.0;
- }
- //------------------------------------------------------------------------------
- void init_ports(void)
- {
- PORTA = 0x00; //If ADC Function was be used,the PORTA could`t set bit 1
- DDRA = 0x00; //the port set input mode.
- PORTB = 0x00;
- DDRB = 0x00;
- PORTC = 0x00; //m103 output on
ly - DDRC = 0x00;
- PORTD = 0x00;
- DDRD = 0x00;
- }
- //------------------------------------------------------------------------------
- void init_device(void)
- {
- CLI();
- init_ports();
- MCUCR = 0x00; //Set Power control(State:Close)
- GICR = 0x00; //Set boot guide(State:Close).
- SEI(); //re-enable interrupts
- //all peripherals are now initialized
- }
- // Calculate the value of the proportional term
- //------------------------------------------------------------------------------
- float MPn_value(struct _PID *PID)
- {
- float myMPn = 0.0;
- myMPn = PID->Kc *( PID->SPn - PID->PVn);
- return myMPn;
- }
- // Calculate the value of the integral term
- //------------------------------------------------------------------------------
- float MIn_value(struct _PID *PID)
- {
- float myMIn = 0.0;
- myMIn = PID->Kc*(PID->Ts/PID->Ti)*(PID->SPn - PID->PVn) + PID->Mx;
- return myMIn;
- }
- //Calculate the value of the differential term
- //------------------------------------------------------------------------------
- float MDn_value(struct _PID *PID)
- {
- float myMDn = 0.0;
- myMDn = PID->Kc * (PID->Td/PID->Ts) * (PID->PVn_1 - PID->PVn);
- return myMDn;
- }
- //Calculate the result of PID
- //------------------------------------------------------------------------------
- float Mn_value(struct _PID *PID)
- {
- float myMn = 0.0;
- myMn = PID->MPn + PID->MIn + PID->MDn;
- return myMn;
- }
- //Calculate the adjustment value of the integral term
- //------------------------------------------------------------------------------
- float Mx_value(struct _PID *PID)
- {
- float myMx = 0.0;
- if(PID->Mn > 1.0)
- {
- myMx = 1.0 - (PID->MPn + PID->MDn);
- }
- else if(PID->Mn < 0.0)
- {
- myMx = -(PID->MPn + PID->MDn);
- }
- return myMx;
- }

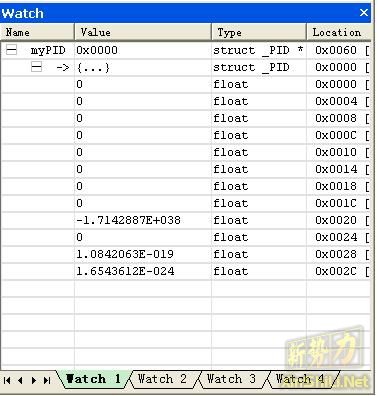
The simulation results when running to the PID initialization function: void init_myPID(void) are as follows: Unable to initialize all to 0

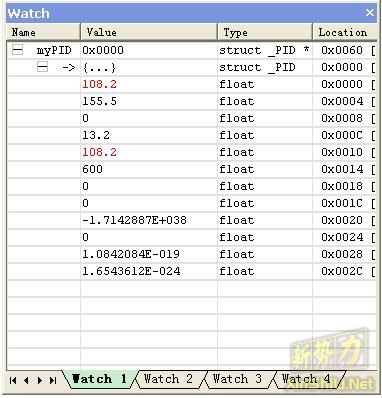
Run to:
myPID->SPn = 155.5;
myPID->Kc = 13.2;
myPID->Ts = 0.2;
myPID->Ti = 600.0;
myPID->Td = 0.0;
myPID->PVn = 108.2;
After reassignment, some parameters Ts are not 0.2
Previous article:How to download AVR ISP download line in AVR Studio environment
Next article:AVR interrupt usage example
Recommended ReadingLatest update time:2024-11-16 19:25
Intelligent air conditioner remote controller based on Atmega16 microcontroller

1 Introduction
In recent years, computer technology, modern communication technology and automatic control technology have developed rapidly. With the development of new technologies, intelligent home systems have also entered thousands of households. Home systems such as air conditioners, televisions, lighting
[Microcontroller]
Application of AVR microcontroller in industrial control system
1 Introduction The application of single-chip microcomputer in the field of industrial control is different from that in the civil and commercial fields. The environment of industrial control is relatively harsh, with many interference sources. The common interference sources come from the electrostatic induction, pea
[Microcontroller]
Popular explanation of PID control of single chip microcomputer
Control model: You control a person to walk 110 steps and then stop using PID control.
1. P proportional control means that he is asked to walk 110 steps. He will stop after walking more than 100 steps (such as 108 steps) or more than 100 steps (such as 112 steps) at a certain pace.
Description: P proportional contr
[Microcontroller]
AVR microcontroller tutorial - lighting up the first LED
After so much preparation, we can finally start doing something with the development board. There are some differences between microcontroller programming and computer programming. Programs must have zero or more inputs and one or more outputs, which both have, but the input and output of computer programming mainly
[Microcontroller]
AVR microcontroller serial port receiving and sending program
#include "iom16v.h" //header file, different compilers have different
/*Serial port initialization function*/ //Use the same serial port for sending and receiving, mega162 has dual serial port function
void Uart_Init(void)
{
UCSRA = 0x02; /*speed*/
UCSRB = 0x18; /*allow receiving and sending*/
UCSRC = 0x
[Microcontroller]
Playing with STM32F407 - Conventional PID Control
The general PID control or algorithm is as follows: uc=Kc*(e+∫e*dt/Ti+Td*de/dt) Or expressed as a transfer function: Gc(s)=Kc*(1+1/(Ti*s)+Td*s) If the PID algorithm is implemented by computer, numerical integration and numerical differentiation must be used to replace integration and differentiation operations, that i
[Microcontroller]
AVR MCU Timer/Counter Study Notes (I)
(For specific register configuration, see the mega16 data sheet) Timer/Counter 1 (16-bit) has normal mode, CTC mode, fast PWM mode, phase correction PWM mode and other operating modes. 1. Normal mode (set to overflow interrupt working mode, vector number is 9) Working principle: Under the set clock frequency
[Microcontroller]
Implementation and simulation of fuzzy PID self-tuning control algorithm based on single chip microcomputer
0 Introduction
Due to the inherent characteristics of hydraulic servo systems (such as dead zone, leakage, time-varying damping coefficients, and the presence of load disturbances), the system often exhibits typical uncertainty and nonlinear characteristics. It is generally difficult to accurately describe
[Microcontroller]
- Popular Resources
- Popular amplifiers
 Siemens PLC Programming Technology and Application Cases (Edited by Liu Zhenquan, Wang Hanzhi, Yang Kun, etc.)
Siemens PLC Programming Technology and Application Cases (Edited by Liu Zhenquan, Wang Hanzhi, Yang Kun, etc.)
Recommended Content





Latest Microcontroller Articles
He Limin Column
Microcontroller and Embedded Systems Bible
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
MoreSelected Circuit Diagrams






MorePopular Articles
- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
MoreDaily News
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
Guess you like
- How to select and calculate the inductor in a DC-DC power supply
- Moon Phase Display
- Lightning protection for DC power ports
- Purgatory Legend-RAM War
- ATX-100 Series Cable Harness Tester Revealed! (Demo + Features)
- Reasons why the automatic function of a digital oscilloscope cannot be triggered when measuring low-frequency signals
- Running helloworld-porting on iTOP-4418 development board
- Capacitor selection and installation considerations
- Millimeter wave sensor technology for detecting passengers in moving vehicles
- How to detect whether a POE switch is a single-chip microcomputer






 京公网安备 11010802033920号
京公网安备 11010802033920号