I have always been reading reference materials and books when writing programs. This time, I don't have any information about the 16-bit single-chip dsPIC33EP32GP502. So I took the opportunity to study it in depth! First, let's look at the choice of oscillator.
 What we need to see here is the second column of the FOSCSEL configuration bit, which is the register address. What needs to be set is IESO<7> and FNOSC<2:0>
What we need to see here is the second column of the FOSCSEL configuration bit, which is the register address. What needs to be set is IESO<7> and FNOSC<2:0>
Keywords:PIC
Reference address:PIC16-bit MCU CAN (2) Thoroughly understand the clock
First look at the clock block diagram: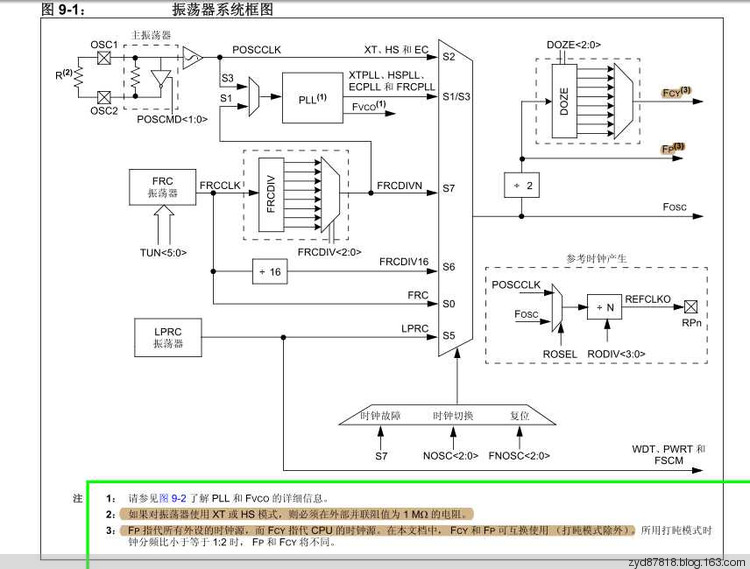

We are using an external crystal oscillator, so the configuration is HS, FCY is the CPU clock, FP is the peripheral clock, FCY=FP (except for doze mode). FCY=Fosc/2. That is, the CPU clock is 1/2 of the crystal frequency. There is also frequency division below. DOZE<2:0>: 011 = FCY is divided by 8 (default) Processor clock division ratio selection bit.
Therefore, the actual FCY = 0.5MHz (using an 8M external crystal oscillator and dividing it by eight 8/2/8 = 0.5MHz).
Take a look at the description of the oscillator selection configuration bits:

Take a look at the description in the header file p33EP32GP502.h:
/* Register FOSCSEL (0x57f8) */
extern __attribute__((space(prog))) int _FOSCSEL;
#define _FOSCSEL(x) __attribute__((section("__FOSCSEL.sec"),space(prog))) int _FOSCSEL = (x);
/*
** Only one invocation of FOSCSEL should appear in a project,
** at the top of a C source file (outside of any function).
**
** The following constants can be used to set FOSCSEL.
** Multiple options may be combined, as shown:
**
** _FOSCSEL( OPT1_ON & OPT2_OFF & OPT3_PLL )
**
** Oscillator Source Selection:
** FNOSC_FRC Internal Fast RC (FRC)
** FNOSC_FRCPLL Fast RC Oscillator with divide-by-N with PLL module (FRCPLL)
** FNOSC_PRI Primary Oscillator (XT, HS, EC)
** FNOSC_PRIPLL Primary Oscillator with PLL module (XT + PLL, HS + PLL, EC + PLL)
** FNOSC_LPRC Low-Power RC Oscillator (LPRC)
** FNOSC_FRCDIVN Internal Fast RC (FRC) Oscillator with postscaler
**
** Two-speed Oscillator Start-up Enable bit:
** IESO_OFF Start up with user-selected oscillator source
** IESO_ON Start up device with FRC, then switch to user-selected oscillator source
**
*/
#define FNOSC_FRC 0xFFF8
#define FNOSC_FRCPLL 0xFFF9
#define FNOSC_PRI 0xFFFA
#define FNOSC_PRIPLL 0xFFFB
#define FNOSC_LPRC 0xFFFD
#define FNOSC_FRCDIVN 0xFFFF
#define IESO_OFF 0xFF7F
#define IESO_ON 0xFFFF
From the header file
1: Register FOSCSEL (0x57f8), that is, the register address is 0x57f8, which is consistent with the table.
2: _FOSCSEL(FNOSC_PRI&IESO_OFF); We declare our configuration bits as 0XFFFA&0XFF7F=0XFF7A at the beginning of the program.
That is, FOSCSEL = 0XFF7A. According to the register description, our configuration is an external HS oscillator and uses the user-selected oscillator source to start the device.
3: The configuration bit only indicates the oscillator to be used, and does not set the division ratio DOZE. Therefore, DOZE is still the default division ratio of 8.
Summary: There are several aspects to configuring the clock:
1: Configure the corresponding configuration bits to select the clock source as internal clock or external crystal oscillator, etc.
2: Configure the corresponding register to select the division ratio.
Previous article:PIC16-bit microcontroller CAN (3) Serial port detailed explanation (232)
Next article:PIC16-bit MCU CAN (1) New project test
Recommended ReadingLatest update time:2024-11-16 13:55
PIC single chip timer initial value calculation method and several period summary

PIC timers are also used quite a lot. It is said that there are powerful software on the Internet to calculate the initial value, but I still calculate it manually. Summary————2013.8.27
PIC microcontroller timer initial value calculation method
The instruction cycle of PIC is 4 oscillation cycles. Without using a fr
[Microcontroller]
Design of stepper motor driver based on PIC16C621A and A3955
introduction
Stepper motors are widely used in motion control systems with high precision requirements, such as robots, printers, floppy disk drives, plotters, mechanical valve controllers, etc. At present, the control of stepper motors mainly includes annular pulse distributors composed of dispersed devices, s
[Microcontroller]
Introduction to the input and output operation methods of PIC microcontroller
PIC microcontroller is a device that people who study microcontrollers must come into contact with, so everyone has a certain understanding of PIC microcontrollers. In the process of learning PIC microcontrollers, the internal hardware resource interface of PIC microcontrollers is one of the basic contents that everyo
[Microcontroller]
Analysis of some experiences and techniques in PIC microcontroller development
PIC microcontrollers are becoming increasingly popular in China. This article introduces some experiences and techniques in software and hardware design during the development of MicroChipPIC series microcontrollers. The PIC series of microcontrollers produced by Microchip Corporation of the United States have been
[Microcontroller]
The electronic clock I wrote using a single chip microcomputer
I have been studying microcontrollers for half a month, and I have learned almost everything. Today I will write a program to practice. Haha
It has the same functions as an electronic watch, can be set, and has a very high accuracy. It uses a 1602 model LCD display. You only need to simply modify the port to
[Microcontroller]
STM32 clock system clock setting
In STM32, there are five clock sources: HSI, HSE, LSI, LSE, and PLL. ①HSI is a high-speed internal clock, RC oscillator, with a frequency of 8MHz. ②HSE is a high-speed external clock that can be connected to a quartz/ceramic resonator or an external clock source with a frequency range of 4MHz~16MHz. ③LSI is a low-spee
[Microcontroller]
Research on clock interrupt technology in ucos ii
1 System interrupts and clock beats
1.1 System Interrupts
An interrupt is a hardware mechanism used to notify the CPU that an asynchronous event has occurred. Once the interrupt is recognized by the system, the CPU saves part (or all) of the context, that is, the value of part (or all) of the registers, and jump
[Microcontroller]
Design of automotive lighting system based on PIC16F873A and LT3476
Introduction
Compared with the traditional halogen low-voltage lighting mode, the use of high-brightness LED as the lighting equipment of the automotive lighting system can bring many benefits. High-brightness LED can provide higher brightness with relatively small power consumption, and can obtain a wide dimmin
[Microcontroller]
 Siemens PLC from Beginner to Mastery with Color Illustrations (Yang Rui)
Siemens PLC from Beginner to Mastery with Color Illustrations (Yang Rui) 【Follow me Season 2 Episode 2】Arduion UR4 homework submission code
【Follow me Season 2 Episode 2】Arduion UR4 homework submission code
Recommended Content





Latest Microcontroller Articles
He Limin Column
Microcontroller and Embedded Systems Bible
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
MoreSelected Circuit Diagrams






MorePopular Articles
- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
MoreDaily News
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
Guess you like
- What do RF engineers do all day?
- 【RVB2601 Creative Application Development】Work Submission
- [TI recommended course] #Switch-mode power converter compensation is simple and easy#
- [Silicon Labs BG22-EK4108A Bluetooth Development Review] 5. Automatically Create a Serial Printing Project
- [RVB2601 Creative Application Development] + Unboxing and Trial
- Causes and solutions for DSP chip cold soldering
- Do I have the right to share the software manual of eLinx2.1.1, the FPGA tool of Yihaiwei?
- Questions about the use of FSM+MLC
- [Allwinner heterogeneous multi-core AI intelligent vision V853 development board evaluation] nfs configuration
- Two-Phase Interleaved LLC Resonant Converter Reference Design Using C2000 MCU






 京公网安备 11010802033920号
京公网安备 11010802033920号