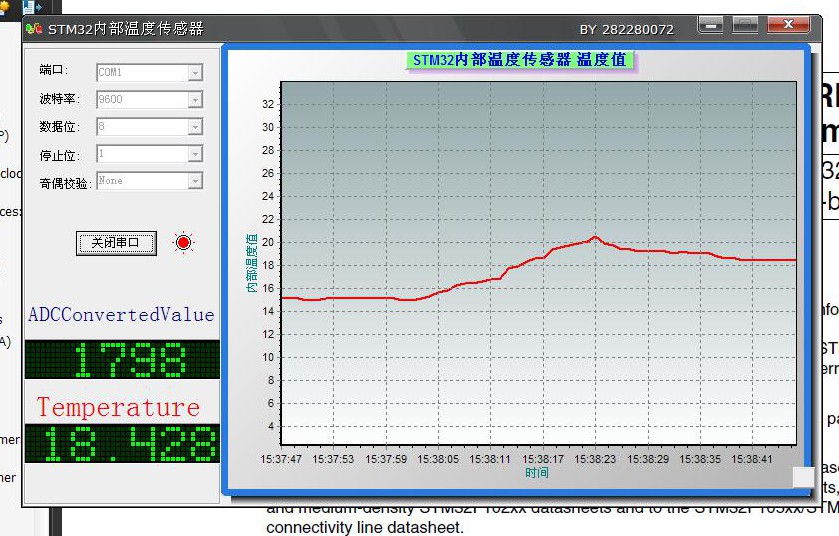
The temperature at home is 15 degrees. I blew hard at the chip and raised it to 20 degrees.
Key code of the lower computer
int main(void)
{
double v,temp,Value;
/* System clocks configuration ---------------------------------------------*/
RCC_Configuration();
/* GPIO configuration ------------------------------------------------------*/
GPIO_Configuration();
/* USARTx configured as follow:
- BaudRate = 9600 baud
- Word Length = 8 Bits
- One Stop Bit
- No parity
- Hardware flow control disabled (RTS and CTS signals)
- Receive and transmit enabled
*/
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
/* Enable USART1 */
USART_Cmd(USART1, ENABLE);
/* DMA1 channel1 configuration --------------------------------------------------*/
DMA_DeInit(DMA1_Channel1);
DMA_InitStructure.DMA_PeripheralBaseAddr = ADC1_DR_Address;
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)&ADCConvertedValue;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
DMA_InitStructure.DMA_Buffer Size = 1;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Disable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
DMA_Init(DMA1_Channel1, &DMA_InitStructure);
/* Enable DMA1 channel 1 */
DMA_Cmd(DMA1_Channel1, ENABLE );
/* ADC1 configuration ------------------------------------------------------*/
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = ENABLE;
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
/* ADC1 regular channel 14 configuration */
//################changed to Channel 10 (potentiometer)###### internal temperature sensor changed to Channel 16 ####################
ADC_RegularChannelConfig(ADC1, ADC_Channel_16, 1, ADC_SampleTime_55Cycles5);
//内部温度传感器 添加这一句
/* Enable the temperature sensor and vref internal channel */
ADC_TempSensorVrefintCmd(ENABLE);
/* Enable ADC1 DMA */
ADC_DMACmd(ADC1, ENABLE);
/* Enable ADC1 */
ADC_Cmd(ADC1, ENABLE);
/* Enable ADC1 reset calibaration register */ //使用之前一定要校准
ADC_ResetCalibration(ADC1);
/* Check the end of ADC1 reset calibration register */
while(ADC_GetResetCalibrationStatus(ADC1));
/* Start ADC1 calibaration */
ADC_StartCalibration(ADC1);
/* Check the end of ADC1 calibration */
while(ADC_GetCalibrationStatus(ADC1));
/* Start ADC1 Software Conversion */
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
while (1)
{
//printf("The ADC1 Converted Value is %d \r\n",ADCConvertedValue);
//v= ADCConvertedValue*3.30/4096;
//printf("The Voltage is %f \r\n",v );
Value=ADC_Filter();
//printf("The ADC_Filter Value is %d \r\n",(int)Value);
temp=(1.42 - Value*3.3/4096)*1000/4.35 + 25;
//printf("The Temperature is %f \r\n",temp );
printf("%s%c%c%c%c%c%s","#**",(int)Value/256,(int)Value%256,'&',(int)((temp-(int)temp)*100),(int)temp,"**%");
for(v=0;v<5000;v++);for(v=0;v<5000;v++);for(v=0;v<5000;v++);
}
}
-------------------------------------------------------------------
上位机关键代码
procedure TMainForm.Comm1ReceiveData(Sender: TObject; Buffer: Pointer;
BufferLength: Word);
var
//iq :Integer;
p :Pchar;
begin
viewstring:=' ';
move(buffer^,pchar(@rbuf)^,bufferlength);
p := StrPos(pchar(@rbuf), '#**');
//if (p <> nil) and (p[9]='*') and ( p[10]='*') and (p[11]='%') then //
if (p <> nil) and (p[5]='&') and (p[8]='*') and ( p[9]='*') and (p[10]='%') then
begin
{
printf("%s%c%c%c%c%c%s",
"#**",
(int)Value/256,(int)Value%256,
'&',
(int)((temp-(int)temp)*100),(int)temp,
"**%");
}
Value :=Ord(p[3])*256 + Ord(p[4]) ; //Ord() 字符-->ASCII码
//Temp:= Float( Ord(p[7]) ) +Float( Ord(p[6]) ) /Float(100.0) ;
Temp:=(1.42 - (Value)*3.3/4096)*1000/4.35 + 25;
viewstring:='The ADC_Filter Value is:';
viewstring:=viewstring+IntToStr(Value);
viewstring:=viewstring+' '+'The Temperature is:';
viewstring:=viewstring+FloatToStr(Temp);
memo1.lines.add(viewstring);
memo1.lines.add(' ');
RzLEDDisplay.Caption := inttostr(Value)+' ';
Temp:=int(Temp*1000)/1000;
RzLEDDisplay1.Caption := floattostr(Temp);
end;
end;
Keywords:STM32
Reference address:STM32 internal temperature sensor experiment - serial port delphi host computer

Key code of the lower computer
int main(void)
{
double v,temp,Value;
/* System clocks configuration ---------------------------------------------*/
RCC_Configuration();
/* GPIO configuration ------------------------------------------------------*/
GPIO_Configuration();
/* USARTx configured as follow:
- BaudRate = 9600 baud
- Word Length = 8 Bits
- One Stop Bit
- No parity
- Hardware flow control disabled (RTS and CTS signals)
- Receive and transmit enabled
*/
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
/* Enable USART1 */
USART_Cmd(USART1, ENABLE);
/* DMA1 channel1 configuration --------------------------------------------------*/
DMA_DeInit(DMA1_Channel1);
DMA_InitStructure.DMA_PeripheralBaseAddr = ADC1_DR_Address;
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)&ADCConvertedValue;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
DMA_InitStructure.DMA_Buffer Size = 1;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Disable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
DMA_Init(DMA1_Channel1, &DMA_InitStructure);
/* Enable DMA1 channel 1 */
DMA_Cmd(DMA1_Channel1, ENABLE );
/* ADC1 configuration ------------------------------------------------------*/
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = ENABLE;
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
/* ADC1 regular channel 14 configuration */
//################changed to Channel 10 (potentiometer)###### internal temperature sensor changed to Channel 16 ####################
ADC_RegularChannelConfig(ADC1, ADC_Channel_16, 1, ADC_SampleTime_55Cycles5);
//内部温度传感器 添加这一句
/* Enable the temperature sensor and vref internal channel */
ADC_TempSensorVrefintCmd(ENABLE);
/* Enable ADC1 DMA */
ADC_DMACmd(ADC1, ENABLE);
/* Enable ADC1 */
ADC_Cmd(ADC1, ENABLE);
/* Enable ADC1 reset calibaration register */ //使用之前一定要校准
ADC_ResetCalibration(ADC1);
/* Check the end of ADC1 reset calibration register */
while(ADC_GetResetCalibrationStatus(ADC1));
/* Start ADC1 calibaration */
ADC_StartCalibration(ADC1);
/* Check the end of ADC1 calibration */
while(ADC_GetCalibrationStatus(ADC1));
/* Start ADC1 Software Conversion */
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
while (1)
{
//printf("The ADC1 Converted Value is %d \r\n",ADCConvertedValue);
//v= ADCConvertedValue*3.30/4096;
//printf("The Voltage is %f \r\n",v );
Value=ADC_Filter();
//printf("The ADC_Filter Value is %d \r\n",(int)Value);
temp=(1.42 - Value*3.3/4096)*1000/4.35 + 25;
//printf("The Temperature is %f \r\n",temp );
printf("%s%c%c%c%c%c%s","#**",(int)Value/256,(int)Value%256,'&',(int)((temp-(int)temp)*100),(int)temp,"**%");
for(v=0;v<5000;v++);for(v=0;v<5000;v++);for(v=0;v<5000;v++);
}
}
-------------------------------------------------------------------
上位机关键代码
procedure TMainForm.Comm1ReceiveData(Sender: TObject; Buffer: Pointer;
BufferLength: Word);
var
//iq :Integer;
p :Pchar;
begin
viewstring:=' ';
move(buffer^,pchar(@rbuf)^,bufferlength);
p := StrPos(pchar(@rbuf), '#**');
//if (p <> nil) and (p[9]='*') and ( p[10]='*') and (p[11]='%') then //
if (p <> nil) and (p[5]='&') and (p[8]='*') and ( p[9]='*') and (p[10]='%') then
begin
{
printf("%s%c%c%c%c%c%s",
"#**",
(int)Value/256,(int)Value%256,
'&',
(int)((temp-(int)temp)*100),(int)temp,
"**%");
}
Value :=Ord(p[3])*256 + Ord(p[4]) ; //Ord() 字符-->ASCII码
//Temp:= Float( Ord(p[7]) ) +Float( Ord(p[6]) ) /Float(100.0) ;
Temp:=(1.42 - (Value)*3.3/4096)*1000/4.35 + 25;
viewstring:='The ADC_Filter Value is:';
viewstring:=viewstring+IntToStr(Value);
viewstring:=viewstring+' '+'The Temperature is:';
viewstring:=viewstring+FloatToStr(Temp);
memo1.lines.add(viewstring);
memo1.lines.add(' ');
RzLEDDisplay.Caption := inttostr(Value)+' ';
Temp:=int(Temp*1000)/1000;
RzLEDDisplay1.Caption := floattostr(Temp);
end;
end;
Previous article:STM32 Product Unique Identification Register (96 bits) Flash Capacity Register
Next article:STM32 internal temperature sensor
Recommended ReadingLatest update time:2024-11-16 13:56
List of DMA1 channels of stm32, related operations of stm32 using DMA

DMA (Direct Memory Access) is often translated as "direct memory access". DMA applications have been available as early as Intel's 8086 platform. A complete microcontroller usually consists of components such as CPU, memory and peripherals. These components are generally independent in structure and function, and th
[Microcontroller]
The STM32 serial port DMA sends two frames continuously, resulting in partial data overwriting
Problem Description When using the STM32 serial port for DMA transmission (Noraml mode), the transmission function log_printf() is called twice in a task, but the data sent back is not consistent with the expected display on the serial port debugging assistant. Part of the data sent for the first time is overwritten
[Microcontroller]
Solution to STM32 JTAG/SWD disabling causing failure to program
Since STM32 has many pin functions, multiplexing and remapping are often used to facilitate the use of hardware. Here we mainly mention the problem of pin correspondence between SWD and JTAG ports. In order to enable TIM2 to be remapped to PA15 and PB3, TIM2 must be remapped, but this is not enough, because the downlo
[Microcontroller]
STM32 FSMC study notes + supplement (FSMC configuration of LCD)
FSMC stands for "Static Memory Controller".
After using the FSMC controller, the FSMC_A provided by the FSMC can be used as the address line, and the FSMC_D provided by the FSMC can be used as the data bus.
(1) When the storage data is set to 8 bits, (FSMC_NANDInitStructure.FSMC_MemoryDataWidth = FSMC_MemoryDataWidt
[Microcontroller]
What does the STM32 series suffix mean?
For example: STM32 F 103 C 8 T 6 The "F" refers to the product type. Now it seems that there is only the general type, namely "F". The "103" refers to the product sub-series, 101 = basic type, 102 = USB basic type, USB 2.0 full-speed device, 103 = enhanced type, 105 or 107 = interconnect type. The "C" refers to the
[Microcontroller]
STM32 custom frequency and duty cycle PWM output method
Figure 1 Figure II PWM is widely used, but different projects have special requirements for the output PWM. To meet these requirements, we need more experiments to verify. Next, we will describe the output method steps of the waveform shown in Figure 1 (Figure 2 is an abnormal waveform). 1. Resources used in this
[Microcontroller]
Simple analysis of STM32 startup file
Simple analysis of STM32 startup file (applicable scope of STM32F10x.s) Timer, model, name in STM32 incomplete manual , all our routines use a startup file called STM32F10x.s, which defines the stack size of STM32 and the names of various interrupts and entry function names, as well as startup-related assembly code.
[Microcontroller]
How to debug STM32 in ram and flash under ulink-Jlink
Keil MDK3.20 debug stm32 method under ULINK
1. Programs run in RAM
Key points: (1) Change the download address of the program to the RAM space
(2) Before debugging the program, set the SP and PC pointers to the Ram space.
Create a new project and select the specific model of STM32. I bought Wanli
[Microcontroller]
- Popular Resources
- Popular amplifiers
 usb_host_device_code
usb_host_device_code Transplantation of real-time operating system RT-ThreadSmart on STM32MP1
Transplantation of real-time operating system RT-ThreadSmart on STM32MP1
Recommended Content





Latest Microcontroller Articles
He Limin Column
Microcontroller and Embedded Systems Bible
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
MoreSelected Circuit Diagrams






MorePopular Articles
- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
MoreDaily News
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
Guess you like
- Does it cost a lot to buy an on-load tapchanger tester?
- Requires 3-way hardware SPI
- Matter and Wi-Fi 6: An ideal combination
- Creativity + Focus | ADI Model of “Garage Innovation”
- 【XMC4800 Relax EtherCAT Kit Review】+ Getting started with DAVE, simple application of ADC module
- Half a year has passed, let’s share what we have gained in EEWORLD!
- MSP430F5529 generates PWM waves with CCS
- FPGA Multiplier
- Quartus2 simulation can not produce waveform
- 2. GD32L233C-START environment construction






 京公网安备 11010802033920号
京公网安备 11010802033920号