1. Interrupt Descriptor
Each interrupt line is described by an irq_desc structure.
//In include/linux/irq.h
struct irq_desc {
unsigned int irq;//interrupt number
struct timer_rand_state *timer_rand_state;
unsigned int *kstat_irqs ;
#ifdef CONFIG_INTR_REMAP
struct irq_2_iommu *irq_2_iommu;
#endif
/*
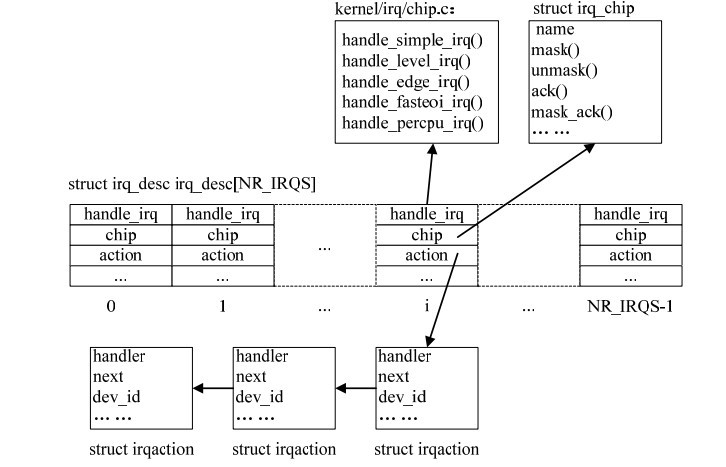
Five functions are implemented in kernel/irq/chip.c: handle_simple_irq(), handle_level_irq(),
handle_edge_irq(), handle_fasteoi_irq() and handle_percpu_irq(). The handle_irq pointer can
point to one of these five functions to select an interrupt event handling strategy, which is
done by the function set_irq_handler()
*/
irq_flow_handler_t handle_irq;//Upper-layer interrupt processing function,
struct irq_chip *chip;//Underlying hardware operation
struct msi_desc *msi_desc;
void *handler_data;//Additional parameters for handle_irq
void *chip_data;//Platform-related additional parameters for chip
struct irqaction *action; /* IRQ action list *///Interrupt service routine list
unsigned int status; /* IRQ status *///Current status of the interrupt
//Call disable_irq() once to turn on or off interrupts, and the depth will increase by 1; call enable_irq() once to decrease the value by 1.
//If depth is equal to 0, turn on this interrupt line, if depth is greater than 0, turn off the interrupt line.
unsigned int depth;
unsigned int wake_depth; ////* wake-up times */
unsigned int irq_count; /* interrupt times */
unsigned long last_unhandled; /* Aging timer for unhandled count */
unsigned int irqs_unhandled;
spinlock_t lock;
#ifdef CONFIG_SMP
cpumask_var_t affinity;
unsigned int cpu;
#ifdef CONFIG_GENERIC_PENDING_IRQ
cpumask_var_t pending_mask;
#endif
#endif
atomic_t threads_active;
wait_queue_head_t wait_for_threads;
#ifdef CONFIG_PROC_FS
struct proc_dir_entry *dir;///proc/irq/ entry
#endif
const char *name;//interrupt name displayed in/proc/interrupts
} ____cacheline_internodealigned_in_smp;
/*In kernel/irq/handle.c there is a global irq_desc array that describes all interrupt lines in the system:
struct irq_desc irq_desc[NR_IRQS] __cacheline_aligned_in_smp = {
[0 ... NR_IRQS-1] = {
.status = IRQ_DISABLED,
.chip = &no_irq_chip,
.handle_irq = handle_bad_irq,
.depth = 1,
.lock = __SPIN_LOCK_UNLOCKED(irq_desc- >lock) ,
}
};
NR_IRQS is the maximum number of interrupts for the s3c2410 chip, which is defined in the file arch/arm/mach-s3c2410/include/mach/irqs.h as follows:
#ifdef CONFIG_CPU_S3C2443
#define NR_IRQS (IRQ_S3C2443_AC97+1)
#else
#define NR_IRQS (IRQ_S3C2440_AC97+1) //Each interrupt source corresponds to an irq_desc structure.
#endif
*/
2. Interrupt hardware operation function set
//Defined in include/linux/irq.h
//The functions in this structure are implemented in the file linux/arch/arm/plat-s3c24xx/irq.c
struct irq_chip {
const char *name; //used for /proc/interrupts
unsigned int (*startup)(unsigned int irq); //default is enable if NULL
void (*shutdown)(unsigned int irq); //default is disable if NULL
void (*enable)(unsigned int irq); //enable interrupts, default is unmask if NULL
void (*disable)(unsigned int irq); //disable interrupts, default is mask if NULL
void (*ack)(unsigned int irq); //Respond to an interrupt and clear the interrupt flag
void (*mask)(unsigned int irq); //Mask an interrupt source, usually turn off the interrupt
void (*mask_ack)(unsigned int irq); //Respond and mask the interrupt source
void (*unmask)(unsigned int irq); //Unmask the interrupt source
void (*eoi)(unsigned int irq);
void (*end)(unsigned int irq);
void (*set_affinity)(unsigned int irq,
const struct cpumask *dest);
int (*retrigger)(unsigned int irq);
int (*set_type)(unsigned int irq, unsigned int flow_type); //Set the interrupt trigger mode IRQ_TYPE_LEVEL
int (*set_wake)(unsigned int irq, unsigned int on);
/* Currently used only by UML, might disappear one day.*/
#ifdef CONFIG_IRQ_RELEASE_METHOD
void (*release)(unsigned int irq, void *dev_id);
#endif
/*
* For compatibility, ->typename is copied into ->name .
* Will disappear.
*/
const char *typename;
};
3. Interrupt handling routine descriptor
//In include/linux/interrupt.h
struct irqaction {
irq_handler_t handler; /* Specific interrupt handler*/
unsigned long flags; //Use a set of flags to describe the relationship between the interrupt line and the I/O device.
cpumask_t mask;
const char *name; /* Name, which will be displayed in /proc/interreupts*/
void *dev_id; /* Device ID, used to distinguish multiple handlers that share an interrupt line, so as to delete the specified one from the many interrupt handlers that share the interrupt line*/
struct irqaction *next; /* Points to the next irq_action structure*/
int irq; /* Interrupt channel number*/
struct proc_dir_entry *dir; /* procfs directory*/
irq_handler_t thread_fn;
struct task_struct *thread;
unsigned long thread_flags;
};
The relationship between these three structures is shown as follows
{
int irq;
irq_desc[irq].status |= IRQ_NOREQUEST | IRQ_NOPROBE;
cpumask_setall(bad_irq_desc.affinity);
bad_irq_desc.cpu = smp_processor_id();
#endif
init_arch_irq();
}
{
unsigned long pend;
unsigned long last;
int irqno;
int i;
for (i = 0; i < 4; i++) {
pend = __raw_readl(S3C24XX_EINTPEND);
break;
printk("irq: clearing pending ext status %08x\n", (int)pend);
last = pend;
}
. . . . . .
/* set all the s3c2410 internal irqs */
/* deal with the special IRQs (cascaded) */
case IRQ_EINT8t23:
case IRQ_UART0:
case IRQ_UART1:
case IRQ_UART2:
case IRQ_ADCPARENT:
set_irq_chip(irqno, &s3c_irq_level_chip);
set_irq_handler(irqno, handle_level_irq);
break;
case IRQ_RESERVED24:
/* no IRQ here */
break;
//irqdbf("registering irq %d (s3c irq)\n", irqno);
set_irq_chip(irqno, &s3c_irq_chip);
set_irq_handler(irqno, handle_edge_irq);
set_irq_flags(irqno, IRQF_VALID);
}
}
set_irq_chained_handler(IRQ_EINT8t23, s3c_irq_demux_extint8);
set_irq_chained_handler(IRQ_UART1, s3c_irq_demux_uart1);
set_irq_chained_handler(IRQ_UART2, s3c_irq_demux_uart2);
set_irq_chained_handler(IRQ_ADCPARENT, s 3c_irq_demux_adc);
irqdbf("registering irq %d (extended s3c irq)\n", irqno);
set_irq_chip(irqno, &s3c_irqext_chip); //Set the hardware operation function set of the sub-interrupt
set_irq_handler(irqno, handle_edge_irq); //Set the upper layer processing function of the sub-interrupt
set_irq_flags(irqno, IRQF_VALID);
}
}
For example, at this time, external interrupt 10 generates an interrupt, the interrupt number IRQ_EINT8t23 is triggered, and the function s3c_irq_demux_extint8() is executed.
static void
s3c_irq_demux_extint8(unsigned int irq,
struct irq_desc *desc)
{
unsigned long eintpnd = __raw_readl(S3C24XX_EINTPEND);
unsigned long eintmsk = __raw_readl(S3C24XX_EINTMASK);
eintpnd &= ~eintmsk;
eintpnd &= ~0xff; /* ignore lower irqs */
/* we may as well handle all the pending IRQs here */
while (eintpnd) { irq += (IRQ_EINT4 - 4); //Recalculate the interrupt number based on this offset } static inline void generic_handle_irq_desc(unsigned int irq, struct irq_desc *desc) Upper interrupt processing function There are five upper-level interrupt handling functions: handle_simple_irq(), handle_level_irq(), These functions are implemented in the file kernel/irq/chip.c. Two commonly used ones are handle_level_irq() and handle_edge_irq(). These five upper-level interrupt handling functions are further processed by calling the function handle_IRQ_event(). irqreturn_t handle_IRQ_event(unsigned int irq, struct irqaction *action) if (!(action->flags & IRQF_DISABLED)) do { retval |= ret; if (status & IRQF_SAMPLE_RANDOM) return retval; void . . . . . . . . . . . . action_ret = handle_IRQ_event(irq, action); void . . . . . . do { desc->status &= ~IRQ_PENDING; //This function is different from handle_level_irq in that it has an extra loop. That is, if //If another interrupt occurs on the interrupt line during the processing of the interrupt line, the processing routine on the interrupt line will be executed again /* The following are 5 commonly used interrupt line states. #define IRQ_INPROGRESS 1 /* A handler for this IRQ is currently being executed */ #define IRQ_PENDING 4 /* An IRQ has appeared on the interrupt line and has been acknowledged, but */ } while ((desc->status & (IRQ_PENDING | IRQ_DISABLED)) == IRQ_PENDING); desc->status &= ~IRQ_INPROGRESS;
irq = __ffs(eintpnd); //Calculate the offset of the interrupt in the external interrupt register EINTPEND
eintpnd &= ~(1<
generic_handle_irq(irq); //According to the recalculated interrupt number, get the corresponding structure irq_desc and call its upper interrupt handling function.
}
{
#ifdef CONFIG_GENERIC_HARDIRQS_NO__DO_IRQ
desc->handle_irq(irq, desc); //Directly call the upper-level interrupt processing function
#else
if (likely(desc->handle_irq))
desc->handle_irq(irq, desc);
else
__do_IRQ(irq); //Generic interrupt processing function, which eventually calls desc->handle_irq(irq, desc);
#endif
}
handle_edge_irq(), handle_fasteoi_irq() and handle_percpu_irq().
{
irqreturn_t ret, retval = IRQ_NONE;
unsigned int status = 0;
local_irq_enable_in_hardirq();
. . . . . .
ret = action->handler(irq, action->dev_id); //Execute interrupt handling function.
. . . . . .
action = action->next;
} while (action); //Call all routines on this interrupt line
add_interrupt_randomness(irq);
local_irq_disable();
}
handle_level_irq(unsigned int irq, struct irq_desc *desc)
{
struct irqaction *action;
irqreturn_t action_ret;
desc = irq_remap_to_desc(irq, desc);
action = desc->action;
. . . . . .
}
handle_edge_irq(unsigned int irq, struct irq_desc *desc)
{
spin_lock(&desc->lock);
desc = irq_remap_to_desc(irq, desc);
. . . . . .
desc->status |= IRQ_INPROGRESS;
struct irqaction *action = desc->action;
. . . . . .
spin_unlock(&desc->lock);
action_ret = handle_IRQ_event(irq, action);
if (!noirqdebug)
note_interrupt(irq, desc, action_ret);
spin_lock(&desc->lock);
#define IRQ_DISABLED 2 /* This IRQ interrupt line has been disabled by the device driver */
it has not been serviced yet*/
#define IRQ_REPLAY 8 /* When Linux resends an IRQ that has been deleted*/
#define IRQ_WAITING 32 /* When probing hardware devices, set this state to mark
the irq being tested*/
out_unlock:
spin_unlock(&desc->lock);
}
Previous article:ARM Linux interrupt mechanism interrupt application
Next article:ARM: Code, RO-data, RW-data, ZI-data meaning
Recommended ReadingLatest update time:2024-11-16 22:36

- Popular Resources
- Popular amplifiers
 Network Operating System (Edited by Li Zhixi)
Network Operating System (Edited by Li Zhixi) usb_host_device_code
usb_host_device_code




 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- Design of full-speed USB interface for CC2531 chip
- 【Recruitment】Shenzhen-Two-hour work-Basic MSP430 knowledge
- EEWORLD University Hall ---- Principles of Automatic Control Xie Hongwei National University of Defense Technology
- Over 200 CircuitPython Libraries
- Does anyone know a comparison table of shortwave antenna elevation height and propagation distance?
- Share: Should the circuit board use grid copper or solid copper?
- Highlight Review丨What hard-core technologies did ADI showcase at IMS 2019? Come and find out~
- Google Protobuf 库
- EEWORLD University ---- Wildfire LwIP Application Development Practical Guide
- Compile QT5.6.0






 京公网安备 11010802033920号
京公网安备 11010802033920号