1 Functional Description
The motor speed control system uses a microprocessor as the control core, and the control board, motor driver chip, peripheral circuits, motor, etc. form the entire motor speed control system. The microprocessor generates a pair (a total of 2 channels) of PWM signals, which are controlled by the motor driver chip to execute the motor to achieve the speed control requirements of the motor under different operating conditions.
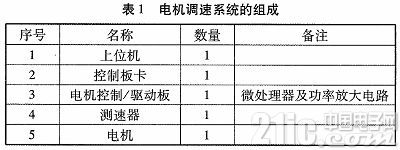
2 Composition of motor speed control system
The composition of the motor speed control system is shown in Table 1.
3 Technical indicators
The technical indicators are as follows:
1) Working temperature: -40℃~+60℃;
2) Supply voltage: DC 27 V;
3) Output torque: 1.2 N·M;
4) Maximum no-load speed: 1 050 rpm;
5) Rated current: 2.3 A.
4 Design Principles
4.1 Block Diagram
The functional block diagram is shown in Figure 1.
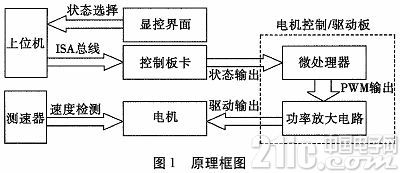
4.2 Principle Introduction
As shown in Figure 1, by operating the computer screen display interface, different operating states of the motor are selected, and the computer control board collects the corresponding state information, outputs the corresponding state quantity code (see truth table 2 for state quantity indication) and sends it to the single-chip microcomputer. The single-chip microcomputer generates a PWM pulse width signal with a corresponding duty cycle based on the received code information. The pulse width signal is amplified by the power amplifier circuit and drives the execution motor, thereby realizing speed control of the motor.
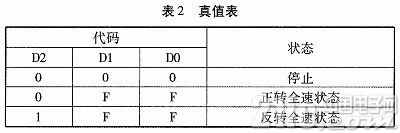
The high bit D2 indicates directionality, 0 for positive direction and 1 for negative direction; D1 and D0 indicate speed.
5 Design Analysis
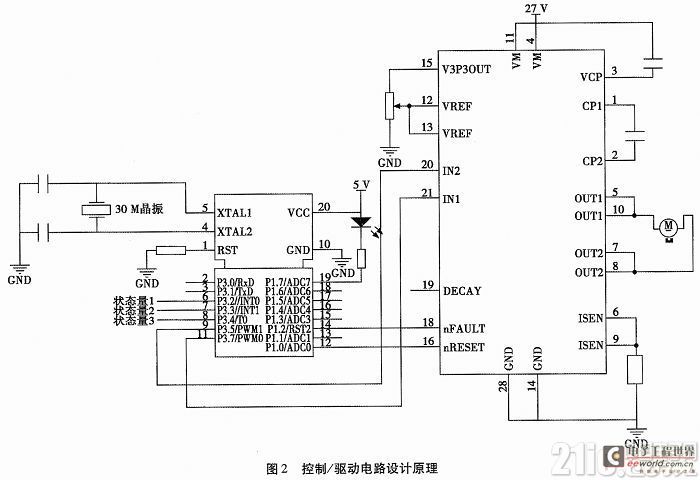
5.1 Control/Drive Circuit Design
The control/drive circuit is mainly composed of the single-chip microcomputer STC12C5206AD, the motor drive chip DRV8842, etc. The design principle of the control/drive circuit is shown in Figure 2.
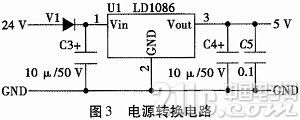
5.2 Power Circuit
The working power supply of this speed control system is DC +24 V and DC +5 V. Among them, +5 V is converted from DC +24 V and output for use by the single-chip microcomputer STC12C5202AD. The +5 V conversion circuit is mainly composed of the voltage regulator LD1086, capacitors, etc., as shown in Figure 3. When designing the circuit board, the power line should be widened as much as possible, and the power line and signal line should be separated to avoid interference signals.
5.3 Motor drive circuit
The motor drive circuit is mainly composed of the driver chip DRV8842 and its peripheral circuits.
The driver chip DRV8842 is an integrated circuit dedicated to motors, which contains a PWM current-controlled H-bridge control circuit. The circuit is shown in Figure 4. The operating voltage is 8.2 V to 45 V, the operating current is 5 A, and the operating temperature is -40℃ to 85℃.
As shown in Figure 4, by controlling the input states of the IN1 and IN2 pins of DRV8842, the output states of OUT1 and OUT2 can be directly controlled. The logic control is shown in Table 3.
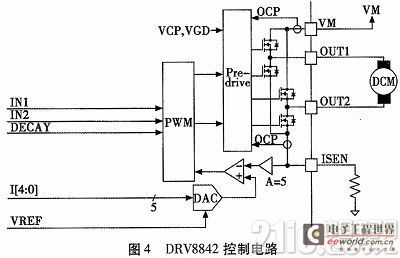
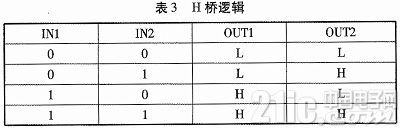
PWM pulse width modulation is used to control the motor speed, and its control logic is as follows: when IN1 inputs PWM signal and IN2 inputs low level, the motor rotates forward; when IN1 inputs low level and IN2 inputs PWM signal, the motor rotates reversely; the duty cycle of the PWM signal determines the speed of the motor.
5.4 Microprocessor
The microprocessor is STC12C5206AD produced by Shenzhen Hongjing Technology. STC12C5206AD is a single clock/machine cycle (1T) microcontroller produced by Hongjing Technology. It is a new generation of microcontroller with high speed/low power consumption/super strong anti-interference. The instruction code is compatible with the traditional 8051, but the speed is 8 to 12 times faster. It integrates MAX810 dedicated reset circuit, 2-way PWM, 8-way high-speed 8-bit A/D conversion (300 k/s, i.e. 300,000 times/second), which is aimed at motor control and strong interference occasions.
The main performance is as follows:
1) Working voltage: 5.5 V ~ 3.3 V;
2) Operating frequency: 0~35 MHz, equivalent to 0~420 MHz of ordinary 8051;
3) User application space: 6 k bytes;
4) On-chip integrated RAM: 256 bytes;
5) General I/O ports: 13;
6) With EEPROM function;
7) Watchdog;
8) Internally integrated MAX810 dedicated reset circuit (when the external crystal is below 20 M, the reset pin is directly connected to the ground with a 1 k resistor);
9)PWM: 2 channels;
10) A/D conversion: 8-bit precision ADC, 8 channels in total, conversion speed up to 300 k/s (300,000 times per second);
11) Working temperature: -40℃~85℃.
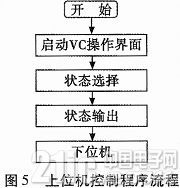
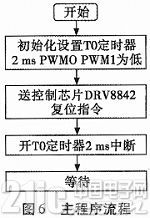
5.5 Software Analysis
The software mainly consists of two parts: the upper computer control program and the lower computer control program. The software flow chart is shown in Figure 5 and Figure 6.
6 Conclusion
The design results meet the requirements, operate well, and achieve the expected purpose.
Previous article:Design of remote monitoring system of temperature and humidity in facility agriculture based on mobile phone text messages
Next article:Multi-task and multi-process based on 51 single chip microcomputer
- Popular Resources
- Popular amplifiers
 MB47082PF
MB47082PF Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
- Keysight Technologies Helps Samsung Electronics Successfully Validate FiRa® 2.0 Safe Distance Measurement Test Case
- Innovation is not limited to Meizhi, Welling will appear at the 2024 China Home Appliance Technology Conference
- Innovation is not limited to Meizhi, Welling will appear at the 2024 China Home Appliance Technology Conference
- Huawei's Strategic Department Director Gai Gang: The cumulative installed base of open source Euler operating system exceeds 10 million sets
- Download from the Internet--ARM Getting Started Notes
- Learn ARM development(22)
- Learn ARM development(21)
- Learn ARM development(20)
- Learn ARM development(19)
- Learn ARM development(14)
- Cheap_flash_fs (FAT high-end version) -- embedded FAT16/32 file system free source code download
- Single-cell lithium battery fuel gauge
- CS5090 5V USB input charges 2 lithium batteries, with path management application, which can realize the function of "charging and discharging at the same time".
- DSP interrupt system and its application
- FPGA Simplified Design Method Classic Case 3
- MSP430G2553 interrupt processing function
- Electrostatic Shielding
- In the second week after returning to work, I received: resignation form and notice of termination of labor contract!
- "Intel SoC FPGA Learning Experience" + Three mmap Examples in Eclipse under Linux
- Learn about MSP430FR5969 remote upgrade






 京公网安备 11010802033920号
京公网安备 11010802033920号