0 Introduction
The design of the central air conditioning system is based on indoor air parameters. By collecting field signals such as the temperature, humidity, operating status of the supply air fan, and the pressure difference of the primary filter section of the fresh air and return air of the entire air conditioning system, the frequency conversion speed regulation of the supply air fan, the humidification of the humidifier, and the opening size of the cold and hot water valves are controlled according to the designed control strategy to achieve the set air state, and the operating conditions of the system are determined according to the state of indoor and outdoor air (temperature, humidity). Under the premise of ensuring the requirements of the production process, the air conditioning system is operated reasonably, safely, reliably, and with low energy consumption, so that the control effect is optimized. The controlled parameters in the general system can be set to two: indoor temperature and humidity. The conventional constant temperature and humidity central air conditioning system is a multi-input and multi-output control system. Because the return air temperature and humidity are consistent with the changes in indoor temperature and humidity, the system return air temperature and humidity are often used as controlled parameters, and the control loop adopts PID control of multiple loops. However, due to the large transmission lag of the air conditioning system, and the fact that it is a system with large interference, high nonlinearity, and many random interference factors, parameter tuning is difficult. A set of well-tuned parameters can only have a good control effect within a small range. When the parameter changes exceed a certain range, the system control effect deteriorates, making it difficult for ordinary PID control to meet the requirements. In view of the above situation, combined with the automatic control project of the fresh air system of the optical processing building of a research institute of the Aerospace Science and Industry Corporation, we use fuzzy control technology and a control method based on fuzzy control rules to design a constant temperature and humidity central air conditioning control system, which has the characteristics of small overshoot, rapid adjustment, short rise time, and good robustness.
1 Refrigeration and air conditioning system model
Most of the actual control objects of refrigeration and air conditioning can be described by high-order differential equations. In order to simplify the analysis, we often use low-order models to approximate the dynamic characteristics of the control object, as long as a certain control accuracy can be met.
In the automatic control system, the differential equation defined by the first-order inertia link is first-order, and the output response needs a certain amount of time to reach the steady-state value. Therefore, the surface cooler and electric water valve in the central air-conditioning system can be approximately represented by the first-order inertia link, and the room is the control object of the system. According to the law of conservation of energy, the differential equation of the control object room can be established. It is a second-order system, but in industrial control we often use a first-order model with pure delay to replace it. The simulation results show that the use of a first-order model with pure delay to approximate the control object can fully meet the requirements of practical applications. The temperature detection and transmission link also has a certain time lag, but compared with the time constant of the control object room, it can be ignored. Therefore, the temperature detection and transmission link can be approximately replaced by a first-order proportional link.
2 Design of fuzzy temperature controller
Fuzzy control is a macro method of system control that adds control rules. The rules usually use the "IF-THEN" method to express expert knowledge and rules in actual control. Its biggest feature is that it expresses the expert's control experience and knowledge into language control rules, and uses rules to control the target system. It is particularly suitable for controlling complex and nonlinear systems with unknown mathematical models.
The structure of the fuzzy control system is shown in Figure 1.
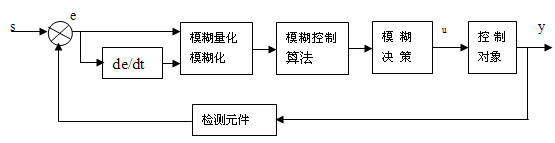
Figure 1
The first step in designing a fuzzy controller is to determine the language variables, language values, and membership functions. The fuzzy controller involved in this article has two input signals and one output signal, which are:
1) One of the input language variables, denoted as e, is the deviation between the temperature setting value and the return air temperature, e=sy.
2) The second input language variable, denoted as de/dt, is the rate of change of the deviation.
3) The output language variable, denoted as u, is the control voltage of the electric water valve, in V, corresponding to the opening of the electric water valve.
The value of the input language variable e is: {negative large, negative medium, negative small, zero, positive small, positive medium, positive large}, and the symbol is {NB, NM, NS, ZE, PS, PM, PB}. The language value membership function selects a triangle, as shown in Figure 2 (a).
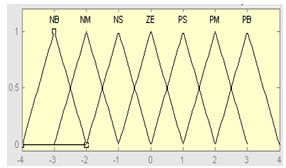
Figure 2a
The values of the input linguistic variable de/dt are: {negative large, negative medium, negative small, zero, positive small, positive medium, positive large}, and the symbols are {NB, NM, NS, ZE, PS, PM, PB}. The linguistic value membership function selection triangle is shown in Figure 2 (b).

Figure 2b
The values of the output variable u are: {closed, slightly open, slightly open, half open, slightly half open, largely half open, fully open}, represented by symbols {CB, CM, CS, M, OS, OM, OB}. The language value membership function is a trapezoid, as shown in Figure 2 (c).

Figure 2c
The language value of each language variable and the corresponding language value membership function are cross-overlapping. When setting initially, they can be arranged in a uniform and equal manner, and then reasonably adjusted according to the system simulation or actual control results.
The second step in designing a fuzzy controller is to introduce fuzzy inference, logic implementation, and control decision inference. The inference logic is composed of a set of IF-THEN control rules. The formation of this set of control rules comes from the summary of practical experience.
Based on experience, the process of reasoning and control decision-making can be expressed in language as follows:
IF{The deviation between the temperature setting value and the return air temperature is too large AND the deviation tends to increase} THEN{The electric water valve is fully open};
IF{The deviation between the temperature setting value and the return air temperature is too small AND the deviation tends to decrease} THEN{The electric water valve is fully closed};
A series of control rules similar to those described above are concentrated in the control rule table.
When the fuzzy controller is used for real-time control, a certain deviation e and deviation change rate de/dt correspond to certain IF-THEN control rules, and these effective control rules produce a comprehensive inference conclusion, which is converted into a certain output value through the defuzzification process, so that the control voltage of the electric water valve is given, corresponding to the opening of the electric water valve. We apply the min-max synthesis operation of fuzzy logic to obtain the comprehensive inference control decision, and use the mom method to defuzzify and produce a certain control regulation effect.
3 System Simulation
The fuzzy logic toolbox in MATLAB provides a large number of functions (a total of 11 membership functions) for fuzzifying input and output variables (membership functions), which can easily complete the fuzzification of variables. In the fuzzy control box, you only need to give the membership functions of the input and output variables to complete the fuzzification of the variables.
3.1 Fuzzification of input and output variables
The fuzzy control system shown in Figure 3 is a dual-input single-output system. The input is the deviation e and the rate of change of the deviation, and the output is u. We can add the membership function to the fuzzy logic control box based on the membership function of the input and output variables given above to complete the fuzzification process of the fuzzy variables.
3.2 Fuzzy Control Rules
The fuzzy logic toolbox in MATLAB provides a rule library. You can add fuzzy control rules to the rule library. Fuzzy control rules are the key to designing a fuzzy controller. The quality of the given rules will directly affect the performance of the designed fuzzy controller.
3.3 Defuzzification
The fuzzy logic toolbox in MATLAB provides defuzzification methods (a total of 5 defuzzification methods, namely centriod, bisector, mom, lom, som). We choose the mom method to simulate the designed fuzzy control system.
3.4 Simulation Results
Through the above work, the design of the fuzzy controller is completed. The fuzzy controller is added to the fuzzy control system simulation block diagram. By calling the corresponding fuzzy inference matrix, the designed fuzzy control system can be simulated.
During the simulation process, the input and output membership functions can be adjusted according to the system simulation or actual control results until the ideal control effect is achieved.
The step response curve of the above fuzzy control system is shown in Figure 3. For analysis and comparison, the control effect of the above system is placed in a coordinate system with the traditional PID control effect. From the system simulation curve, the system response curve of the PID controller has overshoot and a long transition time, while the system response curve of the fuzzy controller is relatively stable without overshoot.
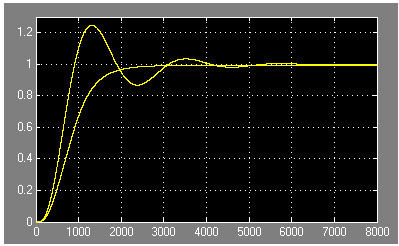
Figure 3
4 Conclusion
The fuzzy controller designed above is used to realize real-time control through computer. According to the size of the deviation and the deviation change value, the output of the electric water valve is determined by the fuzzy control rule, thus achieving a good control effect and being able to monitor the temperature in real time. It has the following characteristics:
1) Compared with the control effect of ordinary PID controller, the system response overshoot is small and the response curve is smooth after using fuzzy controller.
2) The system has good response speed, stability and accuracy, and has strong robustness.
3) The three parameters determined by fuzzy control rules are dynamically changing, which is more in line with the control characteristics of air-conditioning system.
Therefore, fuzzy controller can overcome the limitations of ordinary PID controller and has wide application value in central air-conditioning automatic control.
Previous article:Research on small color difference detection of ceramic tiles based on CIEDE 2000
Next article:Innovative solutions for strip heat treatment
 A Hitchhiker\'s Guide to Chip Verification - A Comprehensive View of Verification from System Theory to UVM
A Hitchhiker\'s Guide to Chip Verification - A Comprehensive View of Verification from System Theory to UVM
- Molex leverages SAP solutions to drive smart supply chain collaboration
- Pickering Launches New Future-Proof PXIe Single-Slot Controller for High-Performance Test and Measurement Applications
- CGD and Qorvo to jointly revolutionize motor control solutions
- Advanced gameplay, Harting takes your PCB board connection to a new level!
- Nidec Intelligent Motion is the first to launch an electric clutch ECU for two-wheeled vehicles
- Bosch and Tsinghua University renew cooperation agreement on artificial intelligence research to jointly promote the development of artificial intelligence in the industrial field
- GigaDevice unveils new MCU products, deeply unlocking industrial application scenarios with diversified products and solutions
- Advantech: Investing in Edge AI Innovation to Drive an Intelligent Future
- CGD and QORVO will revolutionize motor control solutions






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- Anxinke PB-02 module review (1) - Compilation environment construction & appearance display
- 3. [Record] Two library files that must be installed by the GCC compiler
- Analysis of the characteristics of IQ modulators
- Dating Spring---I am only one step away from nature working overtime
- Wanted FRDM-KL25Z
- Analysis of Embedded C Language Pointers
- APM32E103 MINI development board information (software resource package, schematic diagram, user manual, etc.)
- Is there a dual Schottky diode similar to BAT54x that can pass a larger current (0.6A*2)?
- Right angle turn without amplitude
- Intelligence at the Edge Powers Autonomous Factories






 京公网安备 11010802033920号
京公网安备 11010802033920号