1 Introduction
LED is recognized as the fourth generation of green light source. It is a solid cold light source with many advantages such as high efficiency, long life, safety and environmental protection, small size, high reliability, and fast response speed. At present, to achieve the same lighting effect, the power consumption of LED is about 1/10 of that of incandescent lamps and 1/2 of that of fluorescent lamps. Many countries and regions have successively introduced various policies to support the development of the LED industry, hoping that the industry can become an important part of the country's important industries and breed huge business opportunities. LED driving circuits are crucial to LEDs, and LED dimming control can save energy. The driving and dimming of high-brightness white light LEDs have been a hot topic of research in recent years. This paper has conducted research in this area and designed a novel LED lamp driving circuit with dimming function to address the shortcomings of existing circuits.
2 Characteristics of LED
The theoretical luminous efficacy of LED is 300 lm/W. The current laboratory level is 260 lm/W, and the market level is above 120 lm/W. The general conduction voltage of high-brightness LED is about 3.0~4.3V. Its core is PN junction, and its volt-ampere characteristic is the same as that of ordinary diodes. Its current-voltage relationship is as shown in formula (1):

In the formula, VF is the forward voltage of the diode, I0 is the reverse saturation current, which is a constant, q is the electron charge of 1.6×1019, k is the Boltzmann constant, which is 1.38×10-23, T is the thermodynamic temperature, and the constant β is approximately 2. When the voltage applied to the LED is less than its conduction voltage, almost no current flows through the LED. However, when the LED is turned on, its forward current changes exponentially with the forward voltage, and a small voltage fluctuation will cause a large current change. When the voltage in the conduction region rises from 80% to 100% of the rated value, the current rises from 0% to 100% of its rated value.
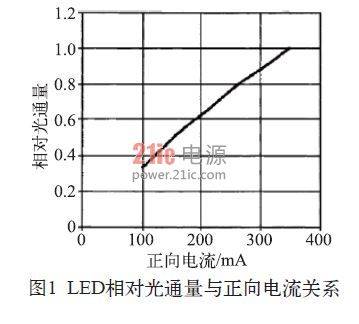
Figure 1 shows the relationship between the relative luminous flux of a certain LED and its forward current IF. The relationship between the luminous flux and forward current of other types of high-power LEDs is different from this, but the difference is very small. It can be seen from the figure that white light LEDs can only emit light effectively when the forward current of the white light LED is greater than a certain value. The luminous flux of the LED is proportional to its forward current, so the luminous brightness can be controlled by controlling the forward current of the LED. If the LED is driven by a constant voltage source, a small voltage change will cause a large current change. Therefore, constant voltage drive is only suitable for low-power occasions with low requirements. In high-demand occasions and high-power occasions, LEDs must be driven by constant current.
Studies have shown that the brightness of LEDs decreases with working time, and after the brightness decreases, the light effect decreases with the increase of current. The brightness of LEDs is in a saturation relationship with the driving current. When the current of LEDs reaches 70%~80% of its rated current, a large proportion of the current is converted into heat energy. Therefore, the driving current of LEDs should be 70%~80% of the rated working current.
3 LED drive circuit classification
3.1 Charge Pump Circuit
The charge pump circuit is also a DC/DC conversion circuit. The charge pump circuit uses the cumulative effect of capacitors on charges to store electrical energy, and uses capacitors as energy coupling elements. By controlling the high-frequency switching of power electronic devices, the capacitors store energy in part of a cycle and release energy in the remaining time. This circuit obtains different output voltages through different connection methods when charging and discharging capacitors, and the entire circuit does not require any inductance.
The charge pump circuit is relatively small in size, uses fewer components, and has a lower cost, but it uses relatively more switching elements. When the input voltage is constant, the output voltage varies in a relatively small range, and the output voltage is mostly 1/3 to 3 times the input voltage. In addition, the circuit power is relatively low, and the efficiency varies with the relationship between the output voltage and the input voltage. Multiple LEDs must be driven in parallel, and ballast resistors must be used to prevent uneven distribution of branch currents, which greatly reduces the system efficiency. Therefore, the charge pump drive circuit is limited in the application of high-power LED lighting drives, and is mostly used in low-power situations.
3.2 Switching Power Supply Circuit
The switching power supply circuit is a DC/DC conversion circuit that changes the output voltage by changing the ratio of the on-time and off-time of the switch tube. From the circuit point of view, compared with the charge pump circuit, it contains magnetic components, namely inductors or high-frequency transformers. Switching power supplies are divided into two types of DC/DC converters: input-output non-isolated, i.e., "pass-through" type and input-output isolated type.
Typical circuits of "pass-through" DC/DC converters include Buck type, Boost type, Buck-Boost type and Cuk type.
Typical circuits of DC/DC converters with isolated input and output include single-ended forward, single-ended flyback, push-pull, half-bridge, full-bridge, etc. Switching power supply circuits can achieve a relatively wide range of voltage outputs, and the output voltage is continuously adjustable and the output power is large, so it has a wider range of applications, and is the first choice in medium and high power applications.
3.3 Linear Circuits
The linear control circuit regards the semiconductor power device working in the linear region as a dynamic resistor, and realizes constant current drive by controlling its control level. The disadvantage of the linear control circuit is that the efficiency is relatively low, but it has a faster response to changes in input voltage and load. The circuit is relatively simple, directly controls the current of the LED, and is easy to achieve high-precision control of the current.
4 Novel drive circuit design
The actual feedback control of the switching power supply is the output voltage, and it is not easy to achieve accurate control of the output current. In addition, if there is a deviation in the control of the switching power supply alone, it is easy to damage the LED lamp; the linear circuit is not efficient.
Based on the above reasons, this paper designs a novel LED drive circuit, which uses a single-ended flyback switching power supply as the front-stage control and a linear voltage-controlled constant current source as the back-stage control. The mains power can be converted by the single-ended flyback power supply to obtain a DC voltage output, which is used as the input of the back-stage voltage-controlled constant current source. Since the input voltage of the voltage-controlled constant current source is powered by a high-efficiency single flyback switching power supply, the voltage-controlled constant current source can accurately control the LED while changing the input voltage of its constant current source in a large range, so the efficiency and accuracy are guaranteed, and it can be powered by the mains. At the same time, the two-stage control is not easy to damage the LED lamp.
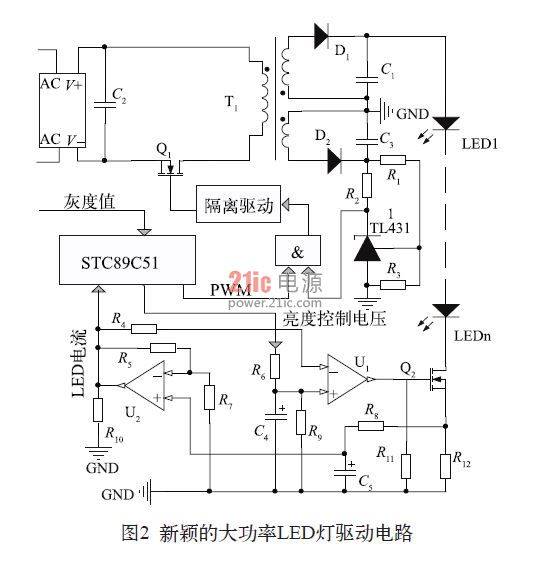
The system circuit is shown in Figure 2. In the figure, transformer T1, switch tube Q1, diode D1 and capacitor C1 constitute a single-ended flyback switching power supply; operational amplifiers U1, U2 and power tube Q2 constitute a voltage-controlled constant current source; the single-chip microcomputer STC89C51 is the core control device. When the gray value changes, the single-chip microcomputer generates a corresponding brightness control voltage according to the gray value it obtains. The brightness control voltage is added to the in-phase input terminal of U1, and the reverse input terminal of U1 is the current signal of the LED obtained by U2. R12 is the current detection resistor. The output voltage of U1 is the control voltage of the MOS tube Q2. According to the concept of virtual short of the operational amplifier, the reverse input voltage of U1 must be equal to the voltage on its forward input terminal, that is, when stable, the current on R12 is controlled by the brightness control voltage and does not change with the change of the load. The microcontroller generates a corresponding brightness control voltage based on the grayscale value it obtains, and also generates a PWM signal. After the PWM signal meets the signal on TL431, it controls the switch of Q1. Then the microcontroller changes the duty cycle of the PWM signal based on the LED current signal obtained, changes the output voltage of the switching power supply, that is, changes the input voltage of the constant current source to reduce the voltage on the power tube Q2, so that it works in the adjustable resistance area or close to the adjustable resistance area when the output current remains unchanged, so as to improve efficiency. TL431 is a three-terminal adjustable shunt reference. Here, the existence of TL431 and its corresponding electrical phase is to limit the maximum output voltage of the switching power supply and further improve the safety of the system.
When the light is relatively good, the single chip microcomputer controls the brightness control voltage it outputs according to the gray value obtained, so that the output current of the constant current source is relatively small, which can achieve energy saving effect. The brightness control voltage output by the single chip microcomputer in Figure 2 must be converted by D/A before it can be supplied to the constant current source. Figure 2 does not show the D/A part.
5 Conclusion
The driving circuit uses a switching power supply as the first stage of control and a voltage-controlled constant current source as the second stage of control, combining the advantages of both, with guaranteed efficiency and control accuracy, and can be directly powered by the mains, two-stage drive, high safety, and not easy to damage the expensive LED lights. Experiments show that the efficiency of the system can reach more than 83%, and the power is the same as that of a single-ended flyback switching power supply, which is worth promoting.
Previous article:The development history and technical challenges of GaN-based LEDs
Next article:Design elements of high-power LED driver power supply
- Popular Resources
- Popular amplifiers
 TC52N3022ECTRT
TC52N3022ECTRT




- MathWorks and NXP Collaborate to Launch Model-Based Design Toolbox for Battery Management Systems
- STMicroelectronics' advanced galvanically isolated gate driver STGAP3S provides flexible protection for IGBTs and SiC MOSFETs
- New diaphragm-free solid-state lithium battery technology is launched: the distance between the positive and negative electrodes is less than 0.000001 meters
- [“Source” Observe the Autumn Series] Application and testing of the next generation of semiconductor gallium oxide device photodetectors
- 采用自主设计封装,绝缘电阻显著提高!ROHM开发出更高电压xEV系统的SiC肖特基势垒二极管
- Will GaN replace SiC? PI's disruptive 1700V InnoMux2 is here to demonstrate
- From Isolation to the Third and a Half Generation: Understanding Naxinwei's Gate Driver IC in One Article
- The appeal of 48 V technology: importance, benefits and key factors in system-level applications
- Important breakthrough in recycling of used lithium-ion batteries






- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
- Detailed explanation of intelligent car body perception system
- How to solve the problem that the servo drive is not enabled
- Why does the servo drive not power on?
- What point should I connect to when the servo is turned on?
- How to turn on the internal enable of Panasonic servo drive?
- What is the rigidity setting of Panasonic servo drive?
- How to change the inertia ratio of Panasonic servo drive
- What is the inertia ratio of the servo motor?
- Is it better for the motor to have a large or small moment of inertia?
- What is the difference between low inertia and high inertia of servo motors?
- 【Repost】Thirty Practical Experiences in Switching Power Supply Design (Part 1)
- blue_nrg, how to turn off subscription function
- CC26xx product model and suffix description
- Melexis for you: Detailed explanation of the implementation and technical support of functional safety in semiconductor R&D. Registration for the prize-winning live broadcast is open!
- One week evaluation report~
- Six key issues when designing a universal serial bus protocol interface
- Reference book on porting from SXX32F103 to MH32F103A
- Good book recommendation! A brief review of Luo's "Basics of Power Supply Design"
- Understand the important role and characteristics of inductors
- [Qinheng Trial] Three CH549 uses pwm to adjust the brightness of the lamp






 京公网安备 11010802033920号
京公网安备 11010802033920号