1 Introduction
With the development of engine electronic control technology, higher requirements have been put forward for engine testing. Automation of engine testing has become an important method to improve engine testing efficiency and quality. Virtual instruments use software to combine computers with standardized virtual instrument hardware to achieve modularization of traditional instrument functions to achieve automatic testing and analysis. Using virtual instrument technology, users can easily complete the signal conditioning, process control, data acquisition, data analysis, waveform display, data storage, fault diagnosis, network communication and other functions of the object under test through the graphical programming environment and operating interface, greatly shortening the time The system development cycle is shortened; at the same time, due to the use of standardized virtual instrument software and hardware, the compatibility and scalability of the test system have also been greatly enhanced; in addition, the virtual instrument technology is highly flexible and reusable. It can minimize the scale of the user's test system and is easy to upgrade and maintain. The user can even use existing hardware to form another test system, thereby reducing unnecessary duplication of investment and system development costs.
2 System composition and working principle
(1) System composition
The engine performance virtual instrument test system mainly consists of four parts: the main control computer module, the cFP real-time monitoring module, the dynamometer module and the engine module to be tested, as shown in Figure 1.
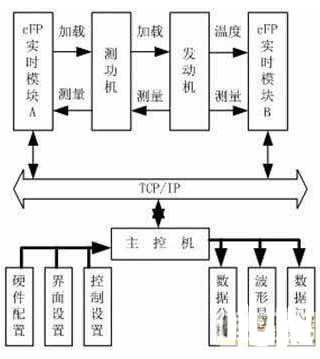
Figure 1 Engine performance virtual instrument testing system
The main control module is a DELL workstation, which is used to provide a graphical user interface, complete the configuration of the system hardware and the settings of the user interface and control parameters, and update the waveform display of each indicator parameter versus time in real time, after curve fitting Finally, the engine characteristic curve is obtained, and finally the recording of test data is completed. At the same time, the main control computer also completes the measurement of non-control parameters, such as pressure, fuel consumption, etc., through the embedded NI PCI data acquisition card.
The cFP real-time monitoring module consists of two NI cFP distributed I/O systems. It communicates with the main control computer through the TCP/IP protocol, obtains control parameter commands from the main control computer to control the dynamometer, and returns the data collected from the dynamometer module. The incoming data signal is handed over to the host computer for processing. Module A is used to complete real-time automatic loading and measurement of control index parameters, and provide emergency measures such as overload protection, emergency shutdown, and system reconstruction after illegal shutdown; module B is used to complete real-time monitoring of each temperature point of the engine to be tested.
The dynamometer module is used to provide a certain load for the engine to be tested, and its internal sensing equipment converts the measured index parameters such as torque, speed and output power of the engine to be tested under the load into the cFP real-time monitoring module A acceptable voltage signal.
(2) Working principle
The engine performance virtual instrument test system can operate in two working modes: automatic working mode and manual working mode. The main test items are:
1) Engine pressure curve (inlet and outlet of oil, water, and gas). 2) Engine temperature curve (inlet and outlet of oil, water, gas and environment). 3) Engine speed curve. 4) Engine torque curve. 5) Engine power curve. 6) Engine fuel consumption curve.
In the automatic working mode, the main control computer first waits for the user to complete the settings and configuration of the software and hardware. Then the user is prompted to select load test or fixed parameter test. Under the load test, the user needs to set test parameters such as load curve, load time, cycle time and test time; under the fixed parameter test, the user can choose to specify torque, speed or power, and set Corresponding calibration parameters, control parameters and test time. After completing the above steps, you can start the test program. The test system will automatically load according to the load specified by the user and complete the performance test of the engine to be tested; or use a certain control algorithm to maintain the stability of the calibration parameters and adjust the performance of the engine under test. Test the engine for automatic testing. While the system is running, users can observe the waveform display of each indicator parameter versus time in the real-time monitoring chart, obtain the engine characteristic curve after curve fitting, and export and save the chart of interest. When the test time is completed, the system automatically terminates the test.
In manual working mode, the working principle of the system is basically similar to that in automatic working mode, except that the system does not perform loop testing, but provides an interactive testing environment. After completing the specified test items, it waits for further operations from the user.
3 Hardware structure
The hardware composition block diagram of the engine performance virtual instrument testing system is shown in Figure 2.

Figure 2 Hardware block diagram of engine performance virtual instrument testing system
(1) Main control machine
The main control computer uses a DELL workstation, which is embedded with Intel Pentium 4 2.6G CPU, multi-function data acquisition card, real-time temperature measurement module and real-time monitoring module.
(2) Real-time monitoring module
The real-time monitoring module uses NI cFP distributed I/O real-time system. As an industrial-grade control system, cFP has FIFO data queues, power-off data cache, watchdog status monitoring, and high impact resistance and anti-interference properties. It is used to complete the core real-time acquisition and control of the system.
(3) Real-time temperature measurement module
The real-time temperature measurement module uses NI cFP distributed I/O real-time system. It adopts cFP-2020 controller and equipped with 4 cFP TC-120 8-channel thermocouple modules, which can be directly used to measure standard J, K, T, N, R, S, E and B type thermocouples, and provides corresponding Signal conditioning, double insulation isolation, input noise filtering, cold junction compensation and various thermocouple temperature algorithms are used for data sampling of each temperature point to be measured in the engine, and use distributed I/O based on TCP/IP protocol The network sharing function enables remote sharing of data, which is conducive to remote real-time monitoring of industrial sites.


Previous article:Implementation of virtual instrument interface design based on FPGA chip EP1c3T144 and development platform
Next article:Implement application solutions for instrument drive systems in the LabVIEW development environment
 Evaluating Roadside Perception for Autonomous Vehicles: Insights from Field Testing
Evaluating Roadside Perception for Autonomous Vehicles: Insights from Field Testing MATLAB hybrid programming and engineering applications - Table of contents is at the end
MATLAB hybrid programming and engineering applications - Table of contents is at the end



- New IsoVu™ Isolated Current Probes: Bringing a New Dimension to Current Measurements
- Modern manufacturing strategies drive continuous improvement in ICT online testing
- Methods for Correlation of Contact and Non-Contact Measurements
- Keysight Technologies Helps Samsung Electronics Successfully Validate FiRa® 2.0 Safe Distance Measurement Test Case
- From probes to power supplies, Tektronix is leading the way in comprehensive innovation in power electronics testing
- Seizing the Opportunities in the Chinese Application Market: NI's Challenges and Answers
- Tektronix Launches Breakthrough Power Measurement Tools to Accelerate Innovation as Global Electrification Accelerates
- Not all oscilloscopes are created equal: Why ADCs and low noise floor matter
- Enable TekHSI high-speed interface function to accelerate the remote transmission of waveform data






- Intel promotes AI with multi-dimensional efforts in technology, application, and ecology
- ChinaJoy Qualcomm Snapdragon Theme Pavilion takes you to experience the new changes in digital entertainment in the 5G era
- Infineon's latest generation IGBT technology platform enables precise control of speed and position
- Two test methods for LED lighting life
- Don't Let Lightning Induced Surges Scare You
- Application of brushless motor controller ML4425/4426
- Easy identification of LED power supply quality
- World's first integrated photovoltaic solar system completed in Israel
- Sliding window mean filter for avr microcontroller AD conversion
- What does call mean in the detailed explanation of ABB robot programming instructions?
- STMicroelectronics discloses its 2027-2028 financial model and path to achieve its 2030 goals
- 2024 China Automotive Charging and Battery Swapping Ecosystem Conference held in Taiyuan
- State-owned enterprises team up to invest in solid-state battery giant
- The evolution of electronic and electrical architecture is accelerating
- The first! National Automotive Chip Quality Inspection Center established
- BYD releases self-developed automotive chip using 4nm process, with a running score of up to 1.15 million
- GEODNET launches GEO-PULSE, a car GPS navigation device
- Should Chinese car companies develop their own high-computing chips?
- Infineon and Siemens combine embedded automotive software platform with microcontrollers to provide the necessary functions for next-generation SDVs
- Continental launches invisible biometric sensor display to monitor passengers' vital signs
- Qorvo experts: Smart home sector will see great growth
- [Live broadcast tomorrow at 2:00 pm] Introduction to Intel FPGA programmable acceleration platform. If you are afraid of forgetting to watch, please join the WeChat group and wait.
- How to control a four-phase stepper motor with pwm?
- TMS320C6000 Basic Learning (2) - Architecture
- Correspondence between TL5728-IDK-A3 board and network port
- 【GD32E503 Review】Part 7: What is screen tearing? Let’s take a look!
- How to remove the AD official logo from the PCB template
- PCB wiring question
- Requirements for using IAR ETM Trace debugging features
- Will the basic technology of PA become more complex with the advent of the 5G era?






 京公网安备 11010802033920号
京公网安备 11010802033920号