A filter is a device used for signal processing. It can remove noise or interference from a signal and retain useful signal components. There are many types of filters, and different types of filters have different characteristics and application scenarios.
-
Basic concepts of filters
A filter is a signal processing device that can filter signals according to their frequency characteristics. The main function of a filter is to remove noise or interference from a signal and retain useful signal components. Filters are usually composed of components such as resistors, capacitors, and inductors, and the combination of these components is used to filter signals.
-
Classification of filters
Filters can be classified according to different criteria. Here are some common filter classification methods:
2.1 Classification by frequency characteristics
According to the frequency characteristics of the filter, filters can be divided into four types: low-pass filter, high-pass filter, band-pass filter and band-stop filter.
-
Low-pass filter: allows low-frequency signals to pass and blocks high-frequency signals.
-
High-pass filter: allows high-frequency signals to pass and blocks low-frequency signals.
-
Bandpass filter: allows frequency signals within a certain range to pass through and blocks signals of other frequencies.
-
Band-stop filter: blocks frequency signals within a certain range and allows signals of other frequencies to pass.
2.2 Classification by implementation method
According to the implementation method of the filter, filters can be divided into two types: analog filters and digital filters.
-
Analog filter: Use analog circuit elements (such as resistors, capacitors, inductors, etc.) to achieve filtering functions.
-
Digital filter: A filter that uses digital signal processing techniques to perform filtering functions, usually implemented in a digital signal processor (DSP) or microcontroller.
2.3 Classification by filter structure
According to the structure of the filter, filters can be divided into two types: passive filters and active filters.
-
Passive filter: It is composed only of passive components (such as resistors, capacitors, inductors, etc.) and does not contain active components (such as amplifiers, operational amplifiers, etc.).
-
Active filters: Contain active components that provide gain and/or isolation.
-
Filter characteristics
Different types of filters have different characteristics. Here are some common filter characteristics:
3.1 Frequency Response
The frequency response of a filter refers to the degree to which the filter responds to signals of different frequencies. The frequency response is usually expressed in terms of amplitude response and phase response.
-
Amplitude response: Indicates the degree to which the filter amplifies or attenuates signals of different frequencies.
-
Phase response: represents the phase change of the filter to signals of different frequencies.
3.2 Cut-off frequency
The cutoff frequency is an important parameter of the filter, which indicates the frequency at which the filter begins to significantly attenuate the signal. For low-pass filters and high-pass filters, the cutoff frequency is the key parameter for them to distinguish signal frequencies.
3.3 Bandwidth
Bandwidth is the frequency range that the filter allows to pass. For bandpass filters and bandstop filters, bandwidth is one of their main parameters.
3.4 Stopband Attenuation
Stopband attenuation is the degree of attenuation of the signal by the filter in the stopband. For band-stop filters, stopband attenuation is an important performance indicator.
1. Determine the filter type by frequency response
-
Observe the frequency response curve
The frequency response curve of the filter is an important basis for judging its type. A low-pass filter passes signals at low frequencies and attenuates them at high frequencies; a high-pass filter passes signals at high frequencies and attenuates them at low frequencies; a band-pass filter passes signals within a certain frequency range and attenuates them at other frequencies; a band-stop filter blocks signals within a certain frequency range and passes them at other frequencies.
-
Measuring cutoff frequency
For low-pass filters and high-pass filters, you can determine the type by measuring their cutoff frequency. The cutoff frequency refers to the frequency point at which the filter begins to attenuate. For low-pass filters, signals below the cutoff frequency pass through, and signals above the cutoff frequency attenuate; for high-pass filters, signals above the cutoff frequency pass through, and signals below the cutoff frequency attenuate.
2. Determine the filter type by working mode
The working mode of the filter is also an important basis for judging its type. A digital filter can be determined to be an IIR filter or a FIR filter by observing its differential equation or transfer function. An IIR filter has a feedback loop and can produce an infinite impulse response; an FIR filter has no feedback loop and can only produce a finite impulse response.
3. Determine the filter type by construction method
The type of filter can also be determined based on how it is constructed. For example, elliptic filters, Butterworth filters, Chebyshev filters, etc. all have different characteristics and types. Elliptic filters have the steepest transition band and the smallest passband ripple, but the stopband ripple is larger; Butterworth filters have flat passband and stopband ripples, but a wider transition band; Chebyshev filters can obtain the steepest transition band under the specified passband ripple.
4. Determine the filter type through frequency domain analysis
-
Fourier Transform
By performing Fourier transform on the frequency response of the filter, its frequency characteristics can be analyzed to determine its type. Fourier transform can convert time domain signals into frequency domain signals, making it easier to observe and analyze the frequency response characteristics of the filter.
-
Z Transform
Z transform is an important transform in discrete time signal processing and can also be used to analyze the frequency characteristics of filters. Z transform can convert discrete time signals into functions in the complex domain, making it easier to analyze the stability and frequency response characteristics of filters.
-
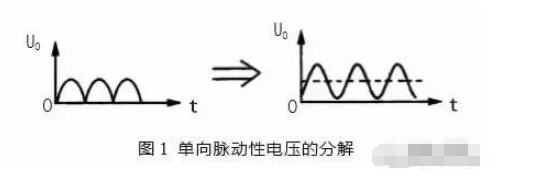
As shown in Figure 1(a), it is a unidirectional pulsating DC voltage waveform. As can be seen from the figure, the direction of the voltage is consistent at any time, but the voltage amplitude fluctuates, that is, on the time axis, the voltage shows a periodic change, so it is pulsating. However, according to the waveform decomposition principle, this voltage can be decomposed into a DC voltage and a group of AC voltages with different frequencies, as shown in Figure 1(b). In Figure 1(b), the dotted line part is the DC component in the unidirectional pulsating DC voltage U., and the solid line part is the AC component in UO.
-
Capacitor filtering principle
According to the above analysis, since the unidirectional pulsating DC voltage can be decomposed into two parts, AC and DC. In the filter circuit of the power supply circuit, the characteristics of "isolating DC and passing AC" and energy storage characteristics of the capacitor, or the characteristics of "isolating DC and passing AC" of the inductor can be used to filter out the AC component in the voltage. Figure 2 shows the principle diagram of capacitor filtering. Figure 2 (a) is the output circuit of the rectifier circuit. After the AC voltage passes through the rectifier circuit, it outputs unidirectional pulsating DC, that is, UO in the circuit. Figure 2 (b) is the capacitor filtering circuit. Since capacitor C1 is equivalent to an open circuit for DC, the DC voltage output by the rectifier circuit cannot pass through C1 to the ground, but can only be added to the load RL (Figure RL). For the AC component output by the rectifier circuit, because C1 has a large capacity and a small capacitive reactance, the AC component flows to the ground through C1, but cannot be added to the load RL. In this way, through the filtering of capacitor C1, the required DC voltage +U is taken out from the unidirectional pulsating DC. The larger the capacity of the filter capacitor C1, the smaller the capacitive reactance to the AC component, which makes the AC component remaining on the load RL smaller and the filtering effect better.

-
Inductor filtering principle
Figure 3 shows the schematic diagram of inductor filtering. Since the inductor L1 is equivalent to a path for DC power, the DC voltage output by the rectifier circuit is directly added to the load RL.

For the AC component output by the rectifier circuit, because L1 has a large inductance and reactance, it has a great obstruction effect on the AC component, preventing the AC from flowing through C1 to the load RL. In this way, through the filtering of the inductor L1, the required DC voltage +U is taken out from the unidirectional pulsating DC. The larger the inductance of the filter inductor L1, the greater the reactance to the AC component, making the AC component remaining on the load RL smaller, and the better the filtering effect, but the DC resistance will also increase.
To judge the type of filter, it is necessary to comprehensively consider its frequency response, working mode, construction method, frequency domain analysis and other aspects. In practical applications, the appropriate method can be selected according to the specific situation. At the same time, it is also necessary to pay attention to the differences and connections between different types of filters in order to better apply filters for signal processing.


Previous article:The role of capacitors in filter circuits Analysis of filter circuit structure diagrams
Next article:Correct wiring method for inverter filter
- Popular Resources
- Popular amplifiers
 LT1787HVHS8#TRPBF
LT1787HVHS8#TRPBF

- Detailed explanation of intelligent car body perception system
- How to solve the problem that the servo drive is not enabled
- Why does the servo drive not power on?
- What point should I connect to when the servo is turned on?
- How to turn on the internal enable of Panasonic servo drive?
- What is the rigidity setting of Panasonic servo drive?
- How to change the inertia ratio of Panasonic servo drive
- What is the inertia ratio of the servo motor?
- Is it better for the motor to have a large or small moment of inertia?
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- LED chemical incompatibility test to see which chemicals LEDs can be used with
- Application of ARM9 hardware coprocessor on WinCE embedded motherboard
- What are the key points for selecting rotor flowmeter?
- LM317 high power charger circuit
- A brief analysis of Embest's application and development of embedded medical devices
- Single-phase RC protection circuit
- stm32 PVD programmable voltage monitor
- Introduction and measurement of edge trigger and level trigger of 51 single chip microcomputer
- Improved design of Linux system software shell protection technology
- What to do if the ABB robot protection device stops
- Detailed explanation of intelligent car body perception system
- How to solve the problem that the servo drive is not enabled
- Why does the servo drive not power on?
- What point should I connect to when the servo is turned on?
- How to turn on the internal enable of Panasonic servo drive?
- What is the rigidity setting of Panasonic servo drive?
- How to change the inertia ratio of Panasonic servo drive
- What is the inertia ratio of the servo motor?
- Is it better for the motor to have a large or small moment of inertia?
- What is the difference between low inertia and high inertia of servo motors?
- Today's broadcast starts at 10:00: Introduction to Littelfuse's SiC MOSFET and Schottky diode products and related applications
- [Me and Arty 2] AT32 transplant threadX and its awesome component GUIX
- TI official website cannot be accessed! ? ?
- Everyone, is it harder to be a hardware engineer or a software engineer?
- Discussion: Can the COVID-19 pandemic help companies related to 5G and wifi6 technology? Get 5-20 Chip Points!
- How to use arrays in C language for microcontrollers
- [GD32L233C-START Review] 17. CMSIS-RTOS2 RTX5 ported to GD32L233 (kernel, multithreading)
- Switching power supply interest group recruitment, just for learning switching power supply! Ps: People without perseverance please bypass!
- [Perf-V Review] Pengfeng Development Board Unboxing Experience
- Download the topics of the National Undergraduate Electronic Design Competition over the years






 京公网安备 11010802033920号
京公网安备 11010802033920号