PIC16F877A serial port sending and querying methods. It took me a day to find out this. It turned out to be a problem with the serial port chip voltage. The summary is as follows:
 //The following is the serial port sending program
//The following is the serial port sending program
Keywords:PIC16F877A
Reference address:PIC16F877A serial port transmission
1. Pay attention to the power supply voltage of the 232 serial port chip, there are 5V and 3.3V
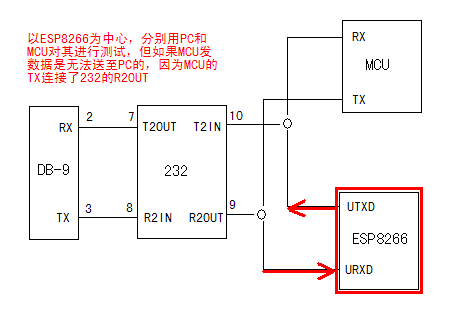
2. Pay attention to the TXD and RXD wiring. The TXD of the microcontroller is connected to the R2OUT of the 232 chip, and the RXD of the microcontroller is connected to the T2IN of the 232 chip.
3. Note that the UTXD of ESP8266 is connected to the RX of MCU, and the URXD is connected to the TX of MCU.
4. Note that the UTXD of ESP8266 is connected to the T2IN of 232, and the URXD is connected to the R2OUT of 232
5. Set the serial port baud rate to 9600
6. Pay attention to the reliability of the connection line. If you use a wire connection, be sure to check whether the wire and the socket are stably connected.
7. System connection is shown in the figure below

#include
#define uchar unsigned char
#define uint unsigned int
__CONFIG(0x3B32);
void delay2ms(uint x)
{
uint a,b;
for(a=x; a>0; a--)
for(b=152; b>0; b--);
}
void UART_SendByte(unsigned char dat)
{
TXREG=that;
while(TRMT==0);
}
void serial_init()
{
TRISC=0xbf; //Set RX as input and TX as output
TXSTA=0x24;
RCSTA=0x80;
SPBRG=0x33;//I use 8MHz crystal, 9600=8000000/(16*(X+1))->X=51->X=0x33
GIE=1;
LIKE=1;
RCIE=1;
}
void main()
{
serial_init();
while(1)
{
UART_SendByte(0x31);
UART_SendByte(0x32);
UART_SendByte(0x33);
delay2ms(500);
}
}
//The following is the program for MCU to send AT naming to ESP8266
#include
#define uchar unsigned char
#define uint unsigned int
#define LED RD1
__CONFIG(0x3B32);
#define LED_OPEN() (LED=1)
#define LED_CLOSE() (LED=0)
#define CPU_FOSC 8000000
#define BAUD 9600
unsigned char* LYMS="AT+CWMODE=3\r";
unsigned char* SZLY="AT+CWSAP=\"ESP8277_CYT\"\,\"1234567890\"\,11\,3\r";
unsigned char* RST="AT+RST\r";
unsigned char* LCAP="AT+CWLAP\r";
unsigned char* SZDLJ="AT+CIPMUX=1\r";
unsigned char* KQFU="AT+CIPSERVER=1\,5000\r";
unsigned char* FSSJ="AT+CIFSR\r";
void delay2ms(uint x)
{
uint a,b;
for(a=x; a>0; a--)
for(b=152; b>0; b--);
}
void sys_init()
{
TRISD=0x00; //Set PORTD to output
}
void usart_init()
{
TRISC=0xbf; //Set RX as input and TX as output
TXSTA=0x24;
RCSTA=0x80;
SPBRG=0x33; //I use 8MHz crystal oscillator, 9600=8000000/(16*(X+1))->X=51->X=0x33
GIE=1;
LIKE=1;
RCIE=1;
}
void usart0_putchar(unsigned char data)
{
while (!TRMT);
TXREG = data;
}
void print(unsigned char* p_string)
{
while (*p_string)
{
if (*p_string != '\r')
{
usart0_putchar(*p_string);
}
else
{
usart0_putchar('\r');
usart0_putchar('\n');
}
p_string++;
}
}
void send_command()
{
print(LYMS);delay2ms(500);delay2ms(500);
print(SZLY);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);
print(RST);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);
print(LCAP);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);
delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);
print(SZDLJ);delay2ms(500);delay2ms(500);
print(KQFU);delay2ms(500);delay2ms(500);
print(FSSJ);delay2ms(500);delay2ms(500);
}
void main()
{
sys_init();
usart_init();
send_command();
while(1)
{
PORTD = 0xff;
delay2ms(500);
PORTD = 0x00;
delay2ms(500);
}
}
//The following is the program for MCU to send AT command to ESP8266, receive command, parse and respond
#include
#define uchar unsigned char
#define uint unsigned int
unsigned char RX_Buffer[32];
unsigned char RX_CNT=0;
#define LED1 RD1
#define LED2 RD2
#define LED3 RD3
__CONFIG(0x3B32);
#define LED1_OPEN() (LED1=1)
#define LED1_CLOSE() (LED1=0)
#define LED2_OPEN() (LED2=1)
#define LED2_CLOSE() (LED2=0)
#define LED3_OPEN() (LED3=1)
#define LED3_CLOSE() (LED3=0)
#define CPU_FOSC 8000000
#define BAUD 9600
unsigned char* LYMS="AT+CWMODE=3\r";
unsigned char* SZLY="AT+CWSAP=\"ESP8277_TYC\"\,\"1234567890\"\,11\,3\r";
unsigned char* RST="AT+RST\r";
unsigned char* LCAP="AT+CWLAP\r";
unsigned char* SZDLJ="AT+CIPMUX=1\r";
unsigned char* KQFU="AT+CIPSERVER=1\,5000\r";
unsigned char* FSSJ="AT+CIFSR\r";
void delay2ms(uint x)
{
uint a,b;
for(a=x; a>0; a--)
for(b=152; b>0; b--);
}
void sys_init()
{
TRISD=0x00; //Set PORTD to output
}
void usart_init()
{
TRISC=0x80; //Set RX as input and TX as output
TXSTA=0x24;
RCSTA=0x90;
SPBRG=0x33; //I use 8MHz crystal oscillator, 9600=8000000/(16*(X+1))->X=51->X=0x33
RCIE=0x01;
TXEN=0x01;
TXIE=0x01;
PEIE=0x01; //External interrupt enable
GIE=1; //General interrupt enable
}
void usart0_putchar(unsigned char data)
{
while (!TRMT);
TXREG = data;
}
void print(unsigned char* p_string)
{
while (*p_string)
{
if (*p_string != '\r')
{
usart0_putchar(*p_string);
}
else
{
usart0_putchar('\r');
usart0_putchar('\n');
}
p_string++;
}
}
void send_command()
{
print(LYMS);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);
print(SZLY);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);
print(RST);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);
print(LCAP);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);
delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);
print(SZDLJ);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);
print(KQFU);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);
print(FSSJ);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);delay2ms(500);
}
void interrupt usart(void)
{
if(RCIE&&RCIF)
{
//TXREG = RCREG;
RX_Buffer[RX_CNT] = RCREG;
if(RX_Buffer[0]==0x45)
RX_CNT++;
else
RX_CNT=0;
if(RX_CNT>=10)
{
if(RX_Buffer[0]==0x45&&RX_Buffer[1]==0x53&&RX_Buffer[2]==0x50)
{
if(RX_Buffer[4]==0x4C&&RX_Buffer[5]==0x45&&RX_Buffer[6]==0x44)
{
if(RX_Buffer[7]==0x31)
{
if(RX_Buffer[3]==0x4B)
LED1_OPEN();
if(RX_Buffer[3]==0x47)
LED1_CLOSE();
}
}
}
RX_CNT=0;
}
}
}
void main()
{
sys_init();
usart_init();
send_command();
LED1_OPEN();
LED2_OPEN();
LED3_OPEN();
while(1);
}
Previous article:Simple example of PIC16F84A reading clock chip DS1302
Next article:Explanation of I/O--lat registers of PIC16 and PIC18
Recommended ReadingLatest update time:2024-11-16 13:06
PIC16F877A TMR0 Timer Experiment 2
/*********PIC16F877A TMR0 timer experiment 2******* Use the prescaler. To achieve accurate timing, TMR0 should not be written repeatedly. PS2 PS1 PS0 0 0 0 2 division 0 0 1 4 division 0 1 0 8 division 0 1 1 16 division 1 0 0 32 division 1 0 1 64 division 1 1 0 128 division 1 1 1 256 division When TMR0 is u
[Microcontroller]
 Starting from scratch - PIC microcontroller common modules and typical examples
Starting from scratch - PIC microcontroller common modules and typical examples Single-phase full-bridge voltage-type SPWM inverter power supply with PIC16F877A as the control core
Single-phase full-bridge voltage-type SPWM inverter power supply with PIC16F877A as the control core
Recommended Content





Latest Microcontroller Articles
He Limin Column
Microcontroller and Embedded Systems Bible
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
MoreSelected Circuit Diagrams






MorePopular Articles
- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
MoreDaily News
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
Guess you like
- [Warehouse temperature and humidity automatic control simulation system] 3. RSL10 BLE Mesh networking first experience
- DSP 2812: GPIO encapsulation using C++
- Compound op amp amplification problem
- The DC power supply output voltage is unstable. How to calibrate and test it?
- [National Technology N32G457 Review] 11 N32G45 and STM32 CAN Communication Example
- PCB drawing board suggestions for B628 lithium battery boost circuit chip
- RT Thread IPC Summary
- Offline voice control solution
- Analysis of 5G millimeter wave terminal technology and test solutions
- 07. Anlu SparkRoad domestic FPGA evaluation [Learning] Serial port loopback experiment






 京公网安备 11010802033920号
京公网安备 11010802033920号