This paper takes the low-power MSP430F149 as the core, designs a navigation system that can simultaneously realize the high-speed acquisition and high-speed combined transmission of navigation information such as satellite navigation (GNSS) receivers, inertial measurement units (IMUs), and air pressure altitude, and perform preliminary navigation and positioning information fusion. It can provide direct navigation services for outdoor mobile robots, and can also be used as a high-speed acquisition system for raw measurement information of high-precision combined navigation systems. The key to the system design is to use the limited interface resources of the microcontroller to realize the parallel acquisition of multi-sensor information, design an effective data synchronization method, solve the problem of inaccessibility caused by omissions in the pressure sensor data manual, and provide a basic method for robot combined positioning. The system makes full use of the capabilities of the MSP430F149 microcontroller and has the advantages of simple structure, low power consumption, and universal applicability to sensors.
The system consists of a power supply, a barometer interface, an IMU interface, a GNSS receiver interface, an SPI to UART module and an MSP430F149. The system composition is shown in Figure 1. The functional implementation of the integrated navigation system is divided into five parts: IMU data reception and analysis, GNSS data reception and analysis, barometer data reception and analysis, integrated navigation solution and data output. The IMU data reception and analysis function is used to obtain the acceleration and angular velocity information required for navigation solution; the GNSS data reception and analysis function is used to obtain the position and velocity information (loosely coupled combination) or GNSS pseudorange and pseudorange rate (tightly coupled combination) required for navigation solution; the barometer data reception and analysis function is used to obtain altitude information; the integrated navigation solution function is the core of the system and is used for integrated navigation solution; the data output includes the integrated output of the original data packet and the output of the solution result.
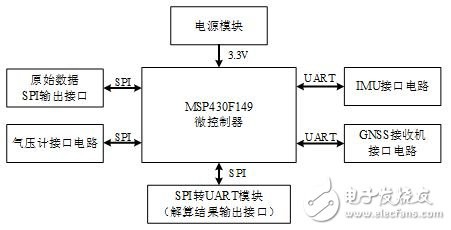
Figure 1 System composition diagram
The inertial devices and GNSS receivers used in this article are both RS-232 level UART interfaces, which are universal, and users can consider devices of different accuracy based on cost. The barometer uses the MS5803-02BA produced by the American MEAS company, which has been solidified in the circuit.
Microcontroller interface
The entire integrated navigation and positioning system requires three UART interfaces and two SPI interfaces. Two of the UART interfaces are provided by the UART resources of the 430 microcontroller, and the other UART interface is converted by the GPIO simulating SPI through the MAX3111E chip; the two SPI interfaces are simulated by GPIO. In addition, an external interrupt pin is required to capture the pulse per second signal (PPS) and an external interrupt pin is required to capture the MAX3111E interrupt signal. The pin resource allocation of MSP430F149 is shown in Table 1.
Power Circuit
The power supply requirement of this system is 3.3V, so the AMS1117 voltage regulator chip is used. When connected to a 5V power supply, it can output a 3.3V stable voltage and provide 1A current to meet the power supply requirements of the system. The circuit design is shown in Figure 2.
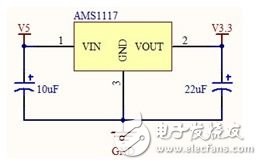
Figure 2 Power supply circuit
IMU device and GNSS receiver interface circuit
Both the IMU device and the GNSS receiver are connected via the UART interface and use the RS232 protocol. Therefore, the two UART interfaces on the 430 microcontroller can be used, but the TTL level and RS232 level conversion is required. The common MAX3232 chip is used here, and the circuit design is shown in Figure 3.
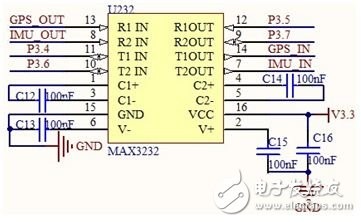
Figure 3 IMU and GNSS interface circuit
Barometer MS5803-02BA interface circuit
MS5803-02BA[3] is a digital pressure sensor produced by MEAS with a resolution of 10cm. The chip contains a high-linearity pressure sensor and an ultra-low-power 24-bit ΔΣ ADC with internal factory calibration coefficients. This chip has two interface modes: SPI and I2C. The PS pin of the chip is configured to select different interface modes (when PS is low, SPI working mode is used; when PS is high, I2C working mode is used). The positioning system described in this article configures the barometer to work in SPI mode. The interface circuit design between MS5803-02BA and the microcontroller is shown in Figure 4.
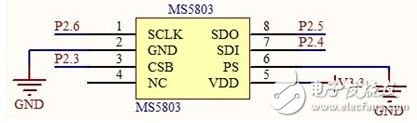
Figure 4 MS5803-02BA interface circuit
The control commands of MS5803-02BA include reset command, temperature ADC command, pressure ADC command, ADC read command, and PROM read command. The control commands are shown in Table 2. The control command is shifted input through the SDI port, and the response result is shifted output from SDO. The input level is determined on the rising edge of the clock signal, and the output level is determined on the falling edge of the clock signal. The output pressure value can be temperature compensated, which needs to be compensated using the coefficient in the PROM inside the chip. After the ADC reads the command input, it outputs the 24-bit ADC result; after the PROM reads the command input, it outputs the 16-bit compensation coefficient.
This paper designs an outdoor mobile robot combined navigation and positioning system based on the MSP430F149 single-chip microcomputer . Through the expansion of the interface, this positioning system can access three channels of information, namely, IMU, GNSS receiver, and barometer, to complete the initial navigation and positioning service function. At the same time, it can be used as a multi-channel data acquisition device to integrate multiple channels of data into a high-speed output interface for further high-precision navigation and solution. The system can be connected to devices of different costs and precisions according to different user needs, as long as they meet the RS-232 protocol. The author puts it into practical use. The entire system makes full use of the resources of this single-chip microcomputer, has a simple structure, low power consumption, and a wide range of applications. It can not only be used as a device for initial navigation and positioning services, but also as a multi-channel data acquisition device.
Previous article:Design and application of temperature measuring instrument using MSP430F247 and TMP275
Next article:Design of Intelligent GPS Controller
- Popular Resources
- Popular amplifiers
 Foundations of Robotics-A Multidisciplinary Approach with Python and ROS
Foundations of Robotics-A Multidisciplinary Approach with Python and ROS MSP432 product training
MSP432 product training TI's solution for high-precision ultrasonic flow measurement at low flow rates
TI's solution for high-precision ultrasonic flow measurement at low flow rates Getting Started with Zero Basics: Teach you step-by-step how to quickly develop MSP430™ projects
Getting Started with Zero Basics: Teach you step-by-step how to quickly develop MSP430™ projects 3 hours of practical experience + analysis: TI engineers take you step by step to get started with MSP430
3 hours of practical experience + analysis: TI engineers take you step by step to get started with MSP430 Application of TI MSP430 integrated configurable signal chain module in the field of sensing measurement
Application of TI MSP430 integrated configurable signal chain module in the field of sensing measurement





 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- [SAMR21 New Gameplay] 33. RTC
- [NXP Rapid IoT Review] Rapid IoT Studio online IDE User Experience
- EEWORLD University Hall -- Disassembly of 3 Economical Digital Multimeters
- CircuitPython Digital Clock
- (Take STM8/STM32 as an example) What is the significance of hardware i2c spi?
- What did you learn from the Industrial Expo Electronics Exhibition?
- [FreeRTOS check-in station 3 is open] Task status and switching, closing time is August 20
- New feature! You can add videos directly to your posts~~~~ No worries~~
- Application of Standing Wave Ratio Analysis Module in Leaky Cable Monitoring System
- DSP system design-DSP development dynamics issues






 京公网安备 11010802033920号
京公网安备 11010802033920号