High voltage AC (HVAC) motors, industrial inverters or high voltage permanent magnet brushless motors are a few examples of high voltage systems, which are typically classified by their horsepower. Although still the most common, other types of motors have also emerged, such as linear motors and gearhead motors with various actuator implementations embedded. Digital motor control solutions allow precise control of the position, speed and torque of these mechanical drives. The MOSFETs in such large mechanical drives are usually more than 600V in capacity.
For example, TI has a gate drive solution, the TPS2829, a non-inverting high-speed MOSFET driver. When combined with the TLV3501 comparator in the feedback loop, the gates in these systems can be digitally controlled. In addition, TI's MOSFET drivers (such as UCC37321 or UCC37323) can directly drive small motors or drive power devices such as MOSFETs or IGBTs.
Key Design Considerations for High-Voltage Motor Control Systems
The core subsystems of a high-voltage motor control system include: controller, isolation, controller interface, and motion feedback.
Controllers: TI also offers a range of control processor solutions, from ultra-low-power MSP430 microcontrollers to TMS470 ARM7-based processors and C2000 digital signal controllers (DSCs). The right controller can optimize motor drive efficiency, improve reliability and reduce overall system cost. The C2000 controller's 32-bit DSP-level performance and on-chip peripherals optimized for motor control allow users to easily implement advanced algorithms such as sensorless vector control of three-phase motors. The C2000 family of controllers (from the low-cost F28016 to the industry's first floating-point DSC TMS320F28335) are all software compatible.
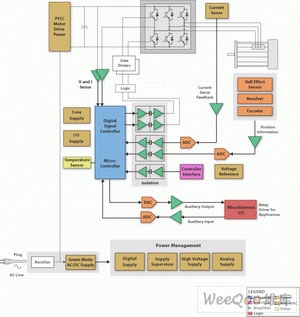
Isolation: TI's digital isolators have logic input and output buffers that are isolated with silicon dioxide, providing 4kV isolation. When used in conjunction with isolated power supplies, these devices can block high voltages, isolate grounds, and prevent noise currents from entering the local ground and interfering with or damaging sensitive circuits.
Controller interface: RS-232 or RS-422 are sufficient for many systems. RS-485 signaling may be bundled with protocols such as Profibus, Interbus, Modbus, or BACnet, each targeting the specific needs of the end user. Sometimes, Controller Area Network (CAN) or EtherNet/IP (industrial protocol) are preferred for networking requirements. M-LVDS is an alternative that can provide lower power consumption.
Motion feedback using external circuits: Isolated Delta-Sigma modulators (AMC1203/AMC1210) are ideal for shunt measurements to flatten glitches and increase current feedback resolution. In addition, the INA19x (x=3 to 8) and INA20x (x=1 to 9) provide wide common-mode voltages for low-side and high-side current shunt monitoring.
Hall effect or magnetic sensors are usually more efficient at measuring currents above 10A, and they inherently provide isolation. The ADS1204, ADS1205, and ADS1208 are three recommended devices. To connect ±10V (20Vpp) signals to an ADC with a 3.3V or 5V supply, an INA159 level difference amplifier can be used . ADCs like the ADS7861/ADS7864 or ADS8361/ADS8364 can provide 4-channel or 6-channel simultaneous current sampling.
Previous article:Implementation of mobile detection system based on PIR
Next article:Design of ultra-low altitude distributed multi-sensor detection node
Recommended ReadingLatest update time:2024-11-16 18:03

- Popular Resources
- Popular amplifiers
-
 MSP430 series single chip microcomputer system engineering design and practice
MSP430 series single chip microcomputer system engineering design and practice -
 oled multi-chip calling program
oled multi-chip calling program - Microcontroller Principles and Applications Tutorial (2nd Edition) (Zhang Yuanliang)
- Getting Started and Improving MSP430 Microcontrollers - National Undergraduate Electronic Design Competition Training Course
 MSP430 series single chip microcomputer system engineering design and practice
MSP430 series single chip microcomputer system engineering design and practice oled multi-chip calling program
oled multi-chip calling program MSP432 product training
MSP432 product training TI's solution for high-precision ultrasonic flow measurement at low flow rates
TI's solution for high-precision ultrasonic flow measurement at low flow rates Getting Started with Zero Basics: Teach you step-by-step how to quickly develop MSP430™ projects
Getting Started with Zero Basics: Teach you step-by-step how to quickly develop MSP430™ projects 3 hours of practical experience + analysis: TI engineers take you step by step to get started with MSP430
3 hours of practical experience + analysis: TI engineers take you step by step to get started with MSP430 Modern Robotics: Mechanics, Planning, and Control
Modern Robotics: Mechanics, Planning, and Control





 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- Real-time solution to single chip microcomputer delay
- CB5654 Development Board Review 2
- [Raspberry Pi Pico Review] 3. My first project
- Problems with op amp sampling in oximeters
- EasyARM-RT1052 Review Summary
- If you have original works, I will give you rewards, up to 500 yuan in cash rewards
- Submit your idea, experience MPS products or evaluation boards for free, and win a backpack, Bluetooth wireless headset, and 10,000 yuan in cash!
- Microchip Spring Sale, popular development tools up to 60% off!
- The 3 big benefits of the start of the Year of the Tiger are brought to you by Murata Tmall flagship store
- Power supply obstacles + small mistakes in charging management






 京公网安备 11010802033920号
京公网安备 11010802033920号