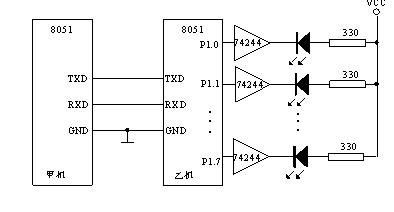
Method 1 is used to realize the communication between two single-chip microcomputers. The main frequency is 6M and the baud rate is 2400bps. The circuit is shown in Figure 5-10. When the two single-chip microcomputers are close to each other, the sending end and the receiving end of machine A and machine B are directly connected, and the two machines share the same ground. When the program is executed, machine A sends a light-on signal to machine B. If the communication is normal, machine B will light up 20 light-emitting diodes after receiving the signal. Machine B uses two working modes: query and interrupt. Of course, the 20 LEDs of machine B can be controlled independently, or they can accept the control of machine A and execute the instructions of machine A. The program needs to be further improved.
Machine A sends the program:
org 0000h
sta: mov tmod,#20h ; set the baud rate
mov tl1,#0FAh
mov th1,#0FAh
setb tr1
mov scon,#40h ; set working mode 1
clr ti
mov a,#00h
mov sbuf,a ; send the light signal
wait: jbc ti,cont ; clear the flag after sending successfully
ajmp wait ; wait for the sending to be completed
cont: sjmp sta ; repeat the sending
end
Machine B queries the working mode and receives:
org 0000h
mov tmod,#20h ; set the communication baud rate
mov tl1,#0FAh
mov th1,#0FAh
setb tr1
mov scon,#40h
clr ri
setb ren ;Allow receiving
wait: jbc ri,read ;Receiving successfully clear flag
ajmp wait ;Receiving is not finished waiting
read: mov a ,sbuf
mov p1,a ;Receive the light signal and send it to P1 port
sjmp $
end
Machine B receives in interrupt working mode
org 0000h
ajmp main
org 0023h
ajmp zd ;Switch to serial port interrupt program
START: MOV TMOD,#20h
mov tl1,#0FAh
mov th1,#0FAh
setb tr1
mov scon,#50h
clr ri
mov ie,#90h ;Open interrupt
MAIN:sjmp $ main program
zd: clr ri ;Clear receiving flag
; ===============The interrupt program needs to be improved ==============
mov a ,sbuf ;Read receiving signal
mov p1,a
MOV R1,A ; Send the received signal to the cache
reti ; Interrupt return
end
Use mode 2 communication, the data frame format is 11 bits, TB8 is the parity bit, the receiving process requires judging RB8, if there is an error, set the F0 flag to 1, if it is correct, set the F0 flag to 0, and then return. The sending baud rate is 375kbps, the crystal oscillator is 12MHz, so SMOD=1. Since the baud rate of the transmitted data has nothing to do with the timer, there is no need to program the timer in the program. The following program is from
a microcontroller hero
at http://www.51hei.com
. I borrowed it for use. If there are any errors or areas that need improvement, please point them out, but I have basically passed the test here.
send:
MOV SCON, #80H ; Set the serial port to mode 2
MOV PCON, #80H ; SMOD=1
MOV R0, #50H ; Set the data block pointer
MOV R7, #20 ; Set the data block length
STA: MOV A, @R0 ; Get data to A
MOV C, P
MOV TB8, C ; Send the parity bit P to TB8,
MOV SBUF, A ; Start sending
; =======================================================
WAIT: JBC TI, CONT ; If one frame of data is sent, clear the flag and send the next frame of data
AJMP WAIT ; Unfinished waiting
;====================================================
CONT: INC R0 ; Modify data pointer
DJNZ R7, STA ; Loop and send to end
RET
;=================
; The receiving program of machine B is as follows:
; When performing two-machine communication, the two machines should use the same working mode and baud rate.
;================================================
MOV SCON, #90H ; Set the serial port to mode 2, REN to 1, and allow reception
MOV PCON, #80H; SMOD=1
MOV R0, #50H; Set the first address of the data block
MOV R7, #20; Set the length of the data block
; =============================================================
WAIT: JBC RI, READ; After receiving a frame of data, RI is cleared and data is read in
AJMP WAIT; Not finished waiting
; ==============================================
READ: MOV A, SBUF; Read in data
JNB PSW.0, PZ; If the received number is an even number, transfer to
JNB RB8, ERR; If the received number is an odd number and the sending end is an even number, a communication error is made
SJMP RIGHT ; If they match, it is correct
PZ: JB RB8, ERR ; If the received number is an even number and the sending end is an odd number, it is an error
; ===========================================
RlGHT: MOV @R0, A ; Communication is correct, store data
INC R0 ; Change address pointer
DJNZ R7, WAIT ; Whether the data block is received, if not, continue
CLR PSW.5 ; Communication is correct, set F0 to 0
RET ; Return
ERROR: SETB PSW.5 ; Communication error, set F0 to 1
RET ; Return
Reference address:Programming of Serial Communication between Two Single-Chip Microcomputers
Machine A sends the program:
org 0000h
sta: mov tmod,#20h ; set the baud rate
mov tl1,#0FAh
mov th1,#0FAh
setb tr1
mov scon,#40h ; set working mode 1
clr ti
mov a,#00h
mov sbuf,a ; send the light signal
wait: jbc ti,cont ; clear the flag after sending successfully
ajmp wait ; wait for the sending to be completed
cont: sjmp sta ; repeat the sending
end
Machine B queries the working mode and receives:
org 0000h
mov tmod,#20h ; set the communication baud rate
mov tl1,#0FAh
mov th1,#0FAh
setb tr1
mov scon,#40h
clr ri
setb ren ;Allow receiving
wait: jbc ri,read ;Receiving successfully clear flag
ajmp wait ;Receiving is not finished waiting
read: mov a ,sbuf
mov p1,a ;Receive the light signal and send it to P1 port
sjmp $
end
Machine B receives in interrupt working mode
org 0000h
ajmp main
org 0023h
ajmp zd ;Switch to serial port interrupt program
START: MOV TMOD,#20h
mov tl1,#0FAh
mov th1,#0FAh
setb tr1
mov scon,#50h
clr ri
mov ie,#90h ;Open interrupt
MAIN:sjmp $ main program
zd: clr ri ;Clear receiving flag
; ===============The interrupt program needs to be improved ==============
mov a ,sbuf ;Read receiving signal
mov p1,a
MOV R1,A ; Send the received signal to the cache
reti ; Interrupt return
end
MOV PCON, #80H; SMOD=1
MOV R0, #50H; Set the first address of the data block
MOV R7, #20; Set the length of the data block
; =============================================================
WAIT: JBC RI, READ; After receiving a frame of data, RI is cleared and data is read in
AJMP WAIT; Not finished waiting
; ==============================================
READ: MOV A, SBUF; Read in data
JNB PSW.0, PZ; If the received number is an even number, transfer to
JNB RB8, ERR; If the received number is an odd number and the sending end is an even number, a communication error is made
SJMP RIGHT ; If they match, it is correct
PZ: JB RB8, ERR ; If the received number is an even number and the sending end is an odd number, it is an error
; ===========================================
RlGHT: MOV @R0, A ; Communication is correct, store data
INC R0 ; Change address pointer
DJNZ R7, WAIT ; Whether the data block is received, if not, continue
CLR PSW.5 ; Communication is correct, set F0 to 0
RET ; Return
ERROR: SETB PSW.5 ; Communication error, set F0 to 1
RET ; Return
Previous article:Listen to the technical experts talk about the 51 single chip microcomputer series
Next article:A Brief Discussion on the RETI Instruction of 51 Single Chip Microcomputer
 Machine Vision Algorithms and Applications 2nd Edition
Machine Vision Algorithms and Applications 2nd Edition
Recommended Content





Latest Microcontroller Articles
He Limin Column
Microcontroller and Embedded Systems Bible
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
MoreSelected Circuit Diagrams






MorePopular Articles
- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
MoreDaily News
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
Guess you like
- Download to get a gift | Collection of the best courseware: Tektronix Semiconductor Device Research Exchange and Keithley Test and Measurement Annual Seminar
- MSP430 Main Memory Bootloader Introduction
- I want to use POE to power some gadgets, but I don’t know what power chip to use?
- STM8L152 drives LCD experimental ultra-low power consumption code 7.2UA
- 5G and IoT will be the great equalizer
- 【XMC4800 Relax EtherCAT Kit Review】+ Getting started with DAVE and lighting up the LED
- R4 is clearly 130 ohms, but why is it 412.147M when simulated?
- Download the Power Path Protection course materials to make future designs more reliable
- EEWORLD University ---- Industrial Motor Driver - Introduction to Texas Instruments System Solutions
- Updated PYBCN_V2 and PYBNANO_V2 firmware






 京公网安备 11010802033920号
京公网安备 11010802033920号