In the navigation system, the speed log is used to continuously measure the speed of the moving ship and calculate the cumulative voyage of the ship. The speed log system designed in this article adopts a dual-sensor combination structure and combines it with microprocessor technology (MCS-51 series single-chip microcomputer and its matching dedicated interface chip are selected) to form a special computer system for the speed log. The instrument has simple structure, small size, high precision and easy operation and adjustment. It can easily carry out digital communication; according to actual needs, it can also send speed analog information. The interface is flexible and adapts to the needs of ship control and operation automation.
1 Hardware design of the log
The log system consists of the main instrument, electromagnetic sensor, differential pressure sensor, bottom valve, pressure guide rod, sub-display that can be expanded by the user and a set of switch distributors (Figure 1) . The outstanding feature of this system is the use of a dual-sensor combination structure: an electromagnetic sensor and a differential pressure sensor (using the principle of Bernoulli's equation) are used to measure the relative motion speed between the ship and the water, and calculate and record the speed of the ship. voyage.
1.1 Technical performance
(1) Speed measurement range: -10 knots ~ +40 knots (range changes can be set by the program); (2) Speed accuracy (speed measurement field accuracy): ±0.20 knots; (3) Speed transmission format: RS-485 ; (4) Single voyage range: 0 ~ 9999.99 nautical miles; (5) Cumulative voyage range: 0 ~ 999999 nautical miles; (6) Cumulative working time range: 0 ~ 99999 hours; (7) Voyage calculation accuracy: ±0.1% (Negative speed does not include range). 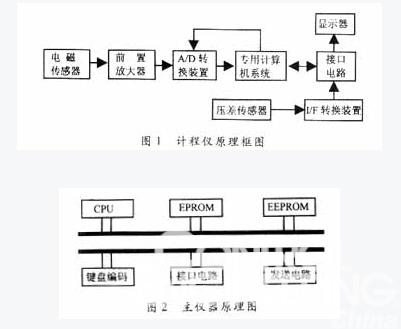
1.2 Working principle of the main instrument
The main instrument is a special microcomputer system with MCS-51 single-chip microcomputer as the core, as shown in Figure 2. It includes: DC power supply device, keyboard input and display device, and single-chip microcomputer device composed of CPU, EPROM, EEPROM and special interface circuit. The main instrument is the core part of the speed log. Its panel is equipped with various operation buttons to control the operation of the entire instrument and complete the speed measurement correction operation.
The main instrument uses interrupt mode to realize data acquisition control of dual sensors. The timer periodically generates an interrupt signal to apply for an interrupt. The interrupt service program receives the electrical signals output by the electromagnetic sensor and the pressure difference sensor, and then the A/D conversion device and I/F The converter converts it into a digital quantity and sends it to the microcomputer system; the data is processed according to a certain calculation formula, and corrected according to the adjusted curve to obtain the speed of the ship, and then numerical integration is performed according to the size of the time interval. Got the voyage. The computer sends the obtained speed information to each user and sub-display through corresponding interface circuits in an appropriate form to complete the display of speed and range. The EEPROM in the computer system can permanently save results such as accumulated voyage distance, accumulated working time, speed adjustment parameters, etc.
1.3 Introduction to the main chips and their system functions
This system mainly uses chips such as AT89C55, ICL7109 and AD652. The introduction is as follows:
1.3.1 AT89C55
The AT89C55 chip is a 51 series 8-bit microcontroller launched by ATMEL. The chip mainly contains 20KFlash memory, 256 bytes of on-chip RAM, 4 8-bit bidirectional addressable I/O ports, 1 full-duplex UART (Universal Asynchronous Receiver Transmitter) serial interface, 3 16-bit timers/counters, multiple priority levels of nested interrupt structures, and an on-chip oscillator and clock circuitry. This system uses the AT89C55's rich 20K flash memory resources to permanently save key results such as the accumulated voyage and accumulated working time in the measurement, and uses its timer counter and interrupt nesting structure to realize data collection from dual sensors. In
this system, T0 and T1 both work in counting mode, T0 generates a 1s counting interrupt, and T1 completes the frequency counting of the pressure difference sensor conversion. INT0 is used for key interrupt processing, and TXD serially sends the speed information of the speedometer with a baud rate of 4800. X1 and X2 are connected to an external 8MHz quartz crystal. Port P1 each completes functions such as sending display codes, speed measurement/navigation judgment, etc. Port P2 is partially involved in address decoding, and port P0 outputs the lower 8 bits of data/address in a time-sharing manner.
1.3.2 ICL7109
ICL7109 is a high-precision, low-noise, low-drift, low-priced dual-integral 12-bit analog-to-digital converter. The chip consists of two parts: analog circuit and digital circuit. The analog circuit consists of analog signal input, oscillation circuit, integration, comparison circuit and reference voltage source. The digital circuit consists of a clock oscillator, asynchronous communication handshake logic, conversion control logic, counters, latches, and three-state gates.
The working voltage of ICL7109 is dual power supply ±5V, GND is the common terminal, an external 6MHz crystal oscillator is connected, and the reference voltage is 2.8V from the external voltage divider input; the interface mode is direct output mode, and the data output is a 12-bit binary number and a polarity bit. The 12-bit A/D conversion is realized by controlling the high and low byte enable terminals, and the lower 8 bits and the upper 4 bits are read out in a time-sharing manner.
1.3.3 AD652
AD652 is a high-speed, high-precision, synchronous I/F converter; it uses an external clock pulse to determine the full-scale frequency and allows voltage or current input. The function of AD652 in this system is to convert the 4-20mA electrical signal of the differential pressure sensor into a frequency signal and output it to the CPU. The CPU then calculates the current speed value based on the working clock of AD652. The working voltage of AD65??
2 is dual power supply ±15V. The working clock is obtained by dividing the crystal oscillator output of the microcontroller by 54LS393. The output pulses of AD652 are counted by T1 of AT89C55, and the counting time interval is 1s.
1.3.4 8155
In addition to three I/O ports (Port A, Port B, and Port C), the 8155 also has a 256-byte static random access memory and a 14-bit timer/counter. It has the characteristics of multiple functions on one chip. In addition, the connection between the 8155 and the microcontroller is very simple and does not even require an 8D latch. This system uses 8155 to form a keyboard display circuit.
2 Speed log software design
In the software design, numerical approximation and various filtering algorithms are used, and the number of hardware is minimized while making full use of the CPU function. In addition to rational selection of hardware, anti-interference traps and redundancy processing are adopted in software to improve the stability and reliability of the system.
The working program of the log is written in assembly language and adopts a modular structure programming method to facilitate use, maintenance and expansion. The speed log software is mainly divided into self-test module, management module, speed and range calculation module and speed measurement correction module. Each module is mainly called in an interrupt mode. The basic working program block diagram of the speed log is shown in Figure 3. When the power switch is turned on, the instrument's dedicated computer system begins self-test, and the results of the self-test will be displayed on the main instrument and sub-displays. After the self-test is completed, the computer system will be initialized. After the initialization is completed, the timer will not Start timing, but you must wait until the start interrupt is started before starting the timing work. At this time, the computer system is in a waiting state, waiting for an interrupt generated by a timer or a button to occur. The interrupt part completes the calculation and sending of speed and range. The flow chart is shown in Figure 3. 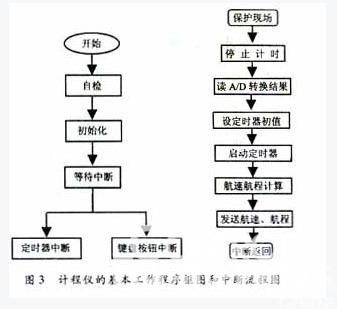
3 Conclusion
This navigation star log system uses a dual-sensor structure to continuously measure the ship’s speed and calculate the voyage according to a certain software algorithm. It has the characteristics of simple hardware circuit, high reliability, stable operation and high cost performance, and is suitable for modern ships. needs. Due to the use of AT89C55 microcontroller, etc., the system has a certain degree of redevelopment. At present, the log has been mass-produced and installed on a variety of ships. References [1] Zhao negative
figure
. Handbook of Sensor Integrated Circuits [M]. Beijing: Chemical Industry Press, 2002. [
2] Wu Kuanming. Practical Handbook of Microcontroller Peripheral Devices - Data Transmission Interface Devices Volume [M]. Beijing :Beijing University of Aeronautics and Astronautics Press, 1998.
[3] Xue Dongliang. Principles and Applications of MCS51/151/251 Microcontroller [M]. Beijing: China Water Conservancy and Hydropower Press, 2001.,
Previous article:Design of low-frequency digital phase measuring instrument based on DSP
Next article:Application of FIR algorithm implemented by FPGA in automobile dynamic weighing instrument
Recommended ReadingLatest update time:2024-11-16 21:30
- Popular Resources
- Popular amplifiers
 Mission-oriented wireless communications for cooperative sensing in intelligent unmanned systems
Mission-oriented wireless communications for cooperative sensing in intelligent unmanned systems Digilent Vivado library
Digilent Vivado library Flow meter solution based on TI MSP430 Scan Interface technology
Flow meter solution based on TI MSP430 Scan Interface technology DSP Technology (Lecturer of the University of Electronic Science and Technology of China’s Excellent Course: Peng Qicong)
DSP Technology (Lecturer of the University of Electronic Science and Technology of China’s Excellent Course: Peng Qicong) Information Theory and Coding Dai Mingyuan, Tongji University
Information Theory and Coding Dai Mingyuan, Tongji University Analysis and Design of a Flyback (flyback power supply design and analysis)
Analysis and Design of a Flyback (flyback power supply design and analysis) VLSI CADII-Design
VLSI CADII-Design





- Keysight Technologies Helps Samsung Electronics Successfully Validate FiRa® 2.0 Safe Distance Measurement Test Case
- From probes to power supplies, Tektronix is leading the way in comprehensive innovation in power electronics testing
- Seizing the Opportunities in the Chinese Application Market: NI's Challenges and Answers
- Tektronix Launches Breakthrough Power Measurement Tools to Accelerate Innovation as Global Electrification Accelerates
- Not all oscilloscopes are created equal: Why ADCs and low noise floor matter
- Enable TekHSI high-speed interface function to accelerate the remote transmission of waveform data
- How to measure the quality of soft start thyristor
- How to use a multimeter to judge whether a soft starter is good or bad
- What are the advantages and disadvantages of non-contact temperature sensors?






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- When the MOS is turned on like 2301, is the VDS voltage 0? That is, there is no loss? The simulation shows that there is no loss.
- Battery Management System BMS Technical Data Transfer
- 【Running posture training shoes】No.004-Sensor production and primary data processing
- What is the principle of the pull-up resistor of the P0 port of the 51 single-chip microcomputer?
- X-NUCLEO-IKS01A3 sensor test based on STM32F401RE development board 2 LPS22HH pressure sensor
- 【FAQ】Enabling secure authentication with TrustFlex secure elements and Microsoft Azure | Microchip Seminar
- USB download cable driver installation.pdf
- Allegro Ali Dog Drawing Board. I haven't drawn on the drawing board for a long time.
- BMW Night Vision (Infrared Thermal Imaging) Camera Disassembly
- stm32 usb cdc communication






 京公网安备 11010802033920号
京公网安备 11010802033920号