Introduction: Currently, software and electronic appliances are driving the development of automobiles towards electrification, networking and intelligence, which is also causing all aspects of the century-old automobile industry to undergo unprecedented changes and reshape. A deep understanding of the essence behind these changes will help us accurately grasp the opportunities brought to us by the biggest industrial transformation opportunities in the next decade.
1 What is Electrical and Electronic Architecture?
The so-called automotive electrical and electronic architecture (EEA) is a concept of vehicle electrical and electronic solutions that integrates the design of the automotive electrical and electronic system principle, central electrical box design, connector design, and electrical and electronic distribution system. It was first proposed by Delphi. Specifically, under specific constraints such as functional requirements, regulations, and design requirements, by analyzing various aspects such as functions, performance, cost, and assembly, the information of powertrain, transmission system, and infotainment system is converted into actual physical layout of power distribution, signal network, data network, diagnosis, power management, and other electrical and electronic solutions.
The concept of EEA not only exists in the automotive industry, but is also widely used in control systems in other industries such as aviation aircraft and industrial automation. The development of EEA usually includes development activities at the levels of requirements and logical function definition, software architecture design, hardware architecture design, and wiring harness design.
2 Challenges facing automotive electronic and electrical architecture
In the 1980s, with the initial rise of IT technology, a revolution in automotive electronics and electrification was launched in the then mechanically dominated automotive industry. The "Electronic Control Unit (ECU)" has developed rapidly, from anti-lock braking systems, four-wheel drive systems, electronically controlled automatic transmissions, active suspension systems, airbag systems, and gradually extended to body safety, network, entertainment and sensor control systems, becoming an important part of the car.
ECUs are usually implemented with simple MCU chips. Each ECU is usually responsible for controlling only a single functional unit. Each ECU is connected through a CAN (Controller Area Network) bus or a LIN (Local Interconnect Network) bus, and exchanges information through a communication protocol predefined by the manufacturer. Therefore, the automotive electronic and electrical architecture of this period is also called "distributed EEA". Under the development trend of software-defined cars and intelligent and networked cars today, this ECU-based distributed EEA is also increasingly exposed to many problems and challenges.
The length and weight of the bus harness: With the increasing functions of automobiles, the number of ECUs carried by each car is also increasing year by year. According to statistics, the average number of ECUs carried by each car in recent years can reach about 30, and some high-end models even have more than 100. The more ECUs there are, the longer the length of the bus harness will be, and the weight of the bus harness will also increase greatly. In 2000, the electronic system of the Mercedes-Benz S-Class sedan already had 80 ECUs and 1,900 communication buses with a total length of 4km. The bus length of the Audi Q7 and Porsche Cayenne launched in 2007 has exceeded 6km, and the total weight exceeds 70kg, which is basically the second heaviest component of the whole car after the engine.
The complexity of the entire system exceeds the limit: After the number of ECUs has increased dramatically, the hardware complexity of the vehicle's electronic and electrical system and the corresponding software complexity have greatly exceeded the limit, resulting in the lack of "flexibility" and "scalability" of the entire system. For example, in such a complex system, adding a new function often causes software and hardware changes in many links of the entire system. This has greatly restricted the development speed of automotive intelligence and networking.
Communication bandwidth bottleneck: The increasing number of sensors in cars has also caused the amount of data in the in-vehicle internal network communication to surge exponentially. Measured by the data transmission volume of a single sensor, the amount of data generated by the radar and camera of the ADAS system each exceeds 100Mbyte/s. For example, a car equipped with five radar sensors and two camera sensors needs to manage a massive amount of data of about 1GByte/s during acquisition and storage. Therefore, traditional FlexRay, LIN and CAN low-speed buses can no longer provide the required high-bandwidth communication capabilities.
Tight coupling of software and hardware: cannot support the trend of software-defined cars. Each ECU is tightly bound to a specific function, which makes it impossible to implement complex functions across multiple ECUs/sensors, and it is also impossible to continuously update the software system on the car through OTA. In the era of software-defined cars, continuous online upgrades of the entire vehicle OTA and the communication and integration between modules have become extremely important. Obviously, the information island problem between ECUs will seriously restrict and hinder this trend.
The above problems and challenges are the natural enemies of quality, cost and time in the context of the development of the three trends of automobiles. To solve this problem, the most effective way is to integrate multiple scattered small sensors into a single sensor with more powerful functions, and to divide multiple scattered ECUs according to functional domains and integrate them into a domain controller (Domain Control Unit, DCU) with more powerful computing power. This idea directly opens the prelude to the upgrade and evolution of automotive electronic and electrical architecture from "distributed => (cross-) domain centralized => central + regional centralized".
3 Evolution Trend of Automotive Electronic and Electrical Architecture
Bosch's classification of the evolution trend of future automotive electronic and electrical architecture is currently a classification method generally accepted by the industry. As shown in Figure 1-1 below:

Figure 1-1 Bosch’s view on the development trend of future automotive electronic and electrical architecture
Today, we are in the process of transitioning from the past distributed EE architecture to the domain-centralized EE architecture, and it is expected that this transition will be completed around 2025. After 2025, the era of cross-domain integration will begin, that is, the EE architecture era of "central + zonal" computing will be transformed.
3.1 Distributed EEA
Under distributed EEA, ECUs are usually specific to a certain function, so there are many ECUs in the vehicle. At this time, the communication capabilities between ECUs are very limited, and generally point-to-point communication is carried out between ECUs that need to cooperate through low-speed buses such as traditional CAN or FlexRay as needed.
At this time, each ECU in the domain cooperates with each other through the local network of the domain. The networks between domains are generally independent of each other, that is, the communication function between domains is very limited, and cross-domain communication is only carried out through low-speed buses such as traditional CAN or FlexRay as needed.
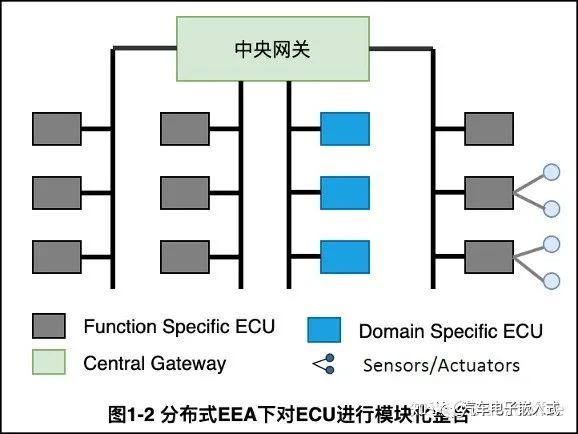
First, modular integration was started for a large number of ECUs. ECUs with similar functions were integrated into one module, which was also the predecessor of the "Function Domain".
In addition, the addition of the automotive central gateway makes data communication between functional modules easier. The gateway integrates data from different buses and networks to exchange data across buses, such as CAN, LIN, FlexRay, and MOST. The automotive central gateway is responsible for protocol conversion between different bus types and participates in network management of each network segment; it routes signals and messages according to actual needs and controls routing timing. This enables communication between different modules and functions. See Figure 1-2 below.
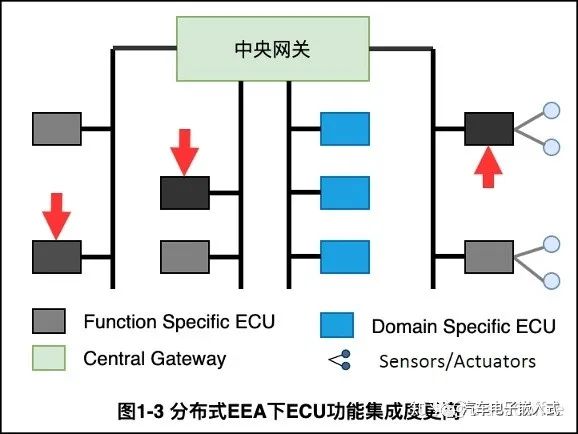
With the deepening of ECU modularization, ECUs with higher integration and stronger performance have emerged. The original multiple ECUs with single functions have been integrated into a single ECU with more powerful functions. As shown in Figure 1-3:
3.2 Domain-Centralized EEA
With the further improvement of modularization and ECU functional integration, the concept of "Function Domain" has emerged. The emergence of functional domain is a sign of "Domain Centralized EEA". From the perspective of software and hardware architecture, the most intuitive manifestation of domain centralized EEA is the "Domain Control Unit (DCU)" as the core of the entire functional domain. The so-called domain controller is a general term for the entire system composed of domain master hardware, operating system, algorithm and application software.
The Domain Host Processor is the core of the domain controller, and is usually a processor with higher integration and higher performance. On the one hand, it also has the protocol conversion function of the gateway, responsible for the protocol data conversion between different buses in the domain; on the other hand, because it has stronger computing power, it will also summarize and calculate the information perceived by other ECUs or sensors in the domain, and then send the results back to different actuators for execution. As shown in Figure 1-4 below:


Previous article:A brief discussion on the underlying technical logic of autonomous driving
Next article:Detailed explanation of the advantages of MQTT protocol in vehicle-to-cloud communication
- Popular Resources
- Popular amplifiers
-
 Detailed explanation of big data technology system: principles, architecture and practice (Dong Xicheng)
Detailed explanation of big data technology system: principles, architecture and practice (Dong Xicheng) - Multi-port and shared memory architecture for high-performance ADAS SoCs
-
 Machine Learning: Architecture in the Age of Artificial Intelligence
Machine Learning: Architecture in the Age of Artificial Intelligence - Automotive Electrical and Electronics (Fifth Edition, James D. Halderman)
 Detailed explanation of big data technology system: principles, architecture and practice (Dong Xicheng)
Detailed explanation of big data technology system: principles, architecture and practice (Dong Xicheng) Machine Learning: Architecture in the Age of Artificial Intelligence
Machine Learning: Architecture in the Age of Artificial Intelligence




- Huawei's Strategic Department Director Gai Gang: The cumulative installed base of open source Euler operating system exceeds 10 million sets
- Analysis of the application of several common contact parts in high-voltage connectors of new energy vehicles
- Wiring harness durability test and contact voltage drop test method
- Sn-doped CuO nanostructure-based ethanol gas sensor for real-time drunk driving detection in vehicles
- Design considerations for automotive battery wiring harness
- Do you know all the various motors commonly used in automotive electronics?
- What are the functions of the Internet of Vehicles? What are the uses and benefits of the Internet of Vehicles?
- Power Inverter - A critical safety system for electric vehicles
- Analysis of the information security mechanism of AUTOSAR, the automotive embedded software framework
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- EEWORLD University - Cadence Allegro 17.4 Quadcopter Full Zero-Based Introductory Course
- How to find MSP430 program examples on TI's official website
- Another board unboxing! This time it's the GigaDevice GD32307E-START development board
- FPGA Introduction Course 2-Counter
- Introduction to TI battery failure modes and BMS related solutions
- LPWAN Alternatives for IoT
- Greenhouse automatic spraying system ---- H743temperature sensor
- Website controlled Christmas tree
- Share: PD fast charging technology has been significantly updated, USB PD3.1 has been released, supporting 48V and 240W output
- How to choose a suitable infrared thermal imager?






 京公网安备 11010802033920号
京公网安备 11010802033920号