Electrification is significantly expanding the range of vehicle motion functions. Each new function equates to more software. This is reflected in the trend towards more centralized E/E architectures with fewer but more powerful controllers. In the process of hardware and software co-development, Vitesco Technologies is developing the scalable "Master Controller Motion" platform for the "software-defined car" of the future. In
vehicles driven purely by internal combustion engines, a typical engine control system includes around 80 functions spread over around 2 million lines of code. With electrification, the range of functions is greatly expanded.
As a result, the share of software is increasing and, by far, the number of electronic control units (ECUs) is also increasing. The rather single-function engine and drive area is transformed into the more comprehensive "Vehicle Motion" area. This includes a wide range of functions from charging to battery management, motor control, power recovery, thermal management, energy distribution and predictive energy-saving driving, as well as the management of big data via cloud connection and regular updates of the driving software.
Electrification in particular is expected to increase the amount of software in motion control units by five times compared to conventional engine control, to 8 to 10 million lines of code by around 2025 (Figure 1).
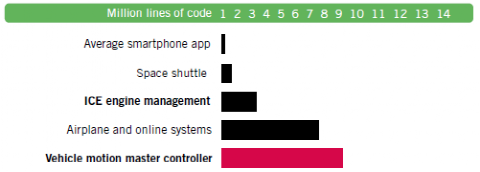
Fig. 1. Increased amount of software with electrification (Source: Vitesco)
Until now, the ECUs for the individual powertrains have been integrated into the vehicle in the form of independent ECUs. Electrification increases the complexity of the interconnections between the motion-related ECUs and therefore requires a transition from the previous separate ECUs to a more integrated solution, which creates new challenges, as shown in Fig. 2. Given the increasing number of vehicles that will gradually transition to more centralized control architectures in the coming years, new hardware for the new software changes will be key to cope with complexity and reduce costs in software. This requires scalable platforms that can gradually migrate the software that exists today to the new, more centralized hardware while also being able to carry new functions.

Fig. 2. Evolution of the traditional E/E architecture towards a new architecture that becomes more centralized and reduces the complexity of the network (Source: Vitesco)
Architectural Challenges
As a co-founder and core member of Autosar, Vitesco has used its software expertise in powertrain to further improve software and hardware. The "Master Controller Motion" currently under development is different from previous powertrain domain controllers. It can use CP Flexibility's "Software Cluster" technology and full microcontroller virtualization technology together with regional controllers, as shown in Figure 3.
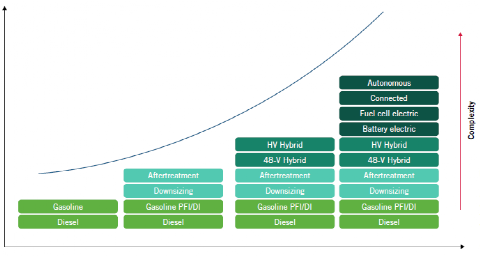
Figure 3. The performance level of the scalable Master Controller can meet the functions in the vehicle (Source: Vitesco)
The Master Controller is able to integrate more and more functions in the vehicle motion and energy management fields on one hardware and ensure high availability and the highest quality in the power domain. Its main challenges include porting functions from a single ECU to the Master Controller's Software Cluster. A key to this is multi-core microcontroller virtualization. The ability to add or update individual functions from different manufacturers at any time without affecting other functions is becoming increasingly important. In view of the increasing number of functions in the motion field, Vitesco has established partnerships with professional companies such as Vector, ETAS and Elektrobit.
Co-developed software solutions
The combination and coexistence of various functions in the centralized control unit for vehicle movement leads to a software size that is significantly larger than in the previous individual ECUs. As a result, the overall software system within the Master Controller is much more complex than the respective software packages on the individual ECUs. These include control functions in AUTOSAR Classic, which usually consist of many individual functions.
In addition, service-oriented architectures based on operating systems such as Linux with AUTOSAR AdapTIve have been introduced, which place different requirements on the hardware. The basic software layer of microcontrollers and microprocessors is very different here. Therefore, it must be taken into account to achieve faster update cycles of microcontrollers similar to the microprocessor level, for which "Software Cluster" and virtual embedded applications have been developed.
In addition to technology, success also requires a software system architect and software integrator to combine the individual software components into an independent, stable overall system with powerful dynamic functional behavior compared to the individual systems. AUTOSAR includes many standard software definitions, but so far not everything that is necessary for the complete function of the ECU.
Therefore, a software system consisting only of AUTOSAR standard components cannot be executed alone. Customized, domain-specific software and, most importantly, system competence are still required. The many individual components of a system must ultimately be integrated into an effective whole as a configuration tailored to each vehicle. In order to separate the essential individual functions of the individual devices in the sense of the "Software Cluster" concept and redistribute them onto the central ECU, a careful analysis of the temporal behavior is required.
A dynamic reference architecture based on the Logical Execution Time (LET) makes this possible on a system-wide basis. The separated and redistributed functions can then be integrated into the time slices of the reference architecture tailored to them. The LET guarantees deterministic data behavior for time-critical chains of events. All this can be described by means of Autosar, thus enabling the planned mapping of model functions. In the context of a more centralized architecture, a network of developers will work together in a partnership. The ECUs are redistributed and, taking into account today's vehicle sizes, will gradually be merged into central control units in a cost-optimized manner.
Above all, new software technologies are a prerequisite for this. Vitesco is creating the latest opportunities for cross-company and cross-domain cooperation with the new framework veApp. This framework encapsulates the software domains of the previous individual ECUs and allows individual applications to be dynamically docked to interfaces within the Master Controller Motion architecture. The basis for this is the extensive experience with multicore architectures and the concept of "Software Cluster".
The framework with separation technology also ensures a deterministic, dynamic architecture in which a new version of a function can be installed without affecting the time behavior of other functions. Compared to the Autosar Adaptive architecture with its more extensive operating system, the veApp framework forms the corresponding flexibility for the more real-time-oriented Autosar Classic through a common substructure for all functions or applications. This provides flexible and more streamlined integration technology for functions with memory requirements in the megabyte range, while Autosar Adaptive applications are in the gigabyte range. Joint development
of hardware solutions
Taking into account the gradual transition to more centralized architectures and the diversity of the respective powertrain topologies, the Master Controller hardware was designed as a scalable modular system to meet different requirements, Figure 4. The predecessor of this new hardware was the domain controller. With the introduction of the regional architecture, their previously distributed hardware and functions will be massively expanded. The Master Controller Motion is the "brain" that manages the vehicle's motion and, in combination with the new software technology, enables unprecedented flexibility in the sense of an integrated platform. Previously isolated systems can be integrated and optimized independently across organizations, Figure 5.
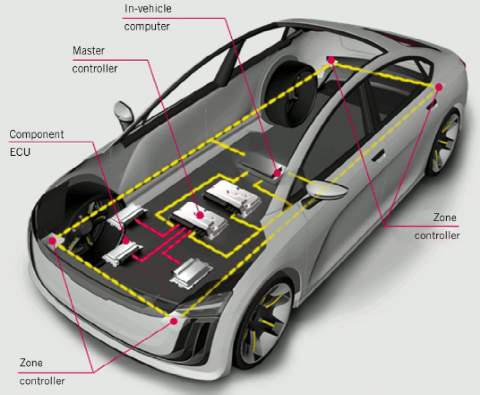
Figure 5 Centralized structure with master and zone controllers (Vitesco Technologies GmbH (exclusive rights))
The commands of the master controller are executed on site by so-called zone controllers. In contrast to the master controller, the focus of the zone controller is on controlling a large number of inputs and outputs, gateway functions and power supply or distribution, including electronic fuses. The computing power of the zone controller is also scalable and serves a wide range of sensors and actuators. The complementary interaction of master and zone controllers greatly simplifies the E/E structure and reduces the number of ECUs in the vehicle.
A large number of the hardware technologies used here, for example with regard to thermal and mechanical implementation, come from many years of expertise in engine control units. The scalable solution space on the electronic side is part of the platform architecture and offers all options for future expansion requirements in terms of functional safety and, in particular, system availability. This covers a wide range of applications right up to autonomous vehicles and provides a stable basis for new vehicle functions while minimizing implementation costs.
Conclusion and Outlook
The higher level of integration in the Master Controller Motion helps to master the complexity of the previous ECU network in the software. The scalability of the platform enables vehicles from different brands and with different powertrain topologies to be gradually transferred to the new E/E architecture.
With Master Controller Motion, in the future of more centralized E/E architectures in the field of vehicle motion, there is a set of technologies that can cope with the massive increase in functions in electrified vehicles. It uses new technologies in hardware and software. Through "Software Cluster", veApp framework or a combination of both, it is possible for many functions to coexist in the central ECU.
In this way, individual functions can be updated without having to regenerate and release the entire system. Due to the high complexity of many software modules from different sources and types, close coordination of the capabilities of the entire system in the Master Controller from various sources is essential for an effective overall solution. New software technologies make it easier to combine individual functions and algorithms from different sources within a new cooperation framework.
As a multifunctional "brain" for comprehensive vehicle motion, the universal Master Controller will work together with more vehicle-specific zone controllers in a more centralized architecture. These controllers, with their local inputs and outputs, ensure the safe execution of motion commands.


Previous article:Advantages of fuel cell vehicles and current status of fuel cell stack technology
Next article:Discuss the advantages and applications of automotive domain controllers
- Popular Resources
- Popular amplifiers
-
 ICCV2023 Paper Summary: Low-Level Vision and Theory
ICCV2023 Paper Summary: Low-Level Vision and Theory -
 Pattern-Oriented Software Architecture Volume 4 A Pattern Language for Distributed Computing
Pattern-Oriented Software Architecture Volume 4 A Pattern Language for Distributed Computing - A portable ECG for recording and flexible development of algorithms and stress detection
- A 0.9V 0.4–6GHz Harmonic Recombination SDR Receiver in 28 nm CMOS...
 ICCV2023 Paper Summary: Low-Level Vision and Theory
ICCV2023 Paper Summary: Low-Level Vision and Theory Pattern-Oriented Software Architecture Volume 4 A Pattern Language for Distributed Computing
Pattern-Oriented Software Architecture Volume 4 A Pattern Language for Distributed Computing




- Huawei's Strategic Department Director Gai Gang: The cumulative installed base of open source Euler operating system exceeds 10 million sets
- Analysis of the application of several common contact parts in high-voltage connectors of new energy vehicles
- Wiring harness durability test and contact voltage drop test method
- Sn-doped CuO nanostructure-based ethanol gas sensor for real-time drunk driving detection in vehicles
- Design considerations for automotive battery wiring harness
- Do you know all the various motors commonly used in automotive electronics?
- What are the functions of the Internet of Vehicles? What are the uses and benefits of the Internet of Vehicles?
- Power Inverter - A critical safety system for electric vehicles
- Analysis of the information security mechanism of AUTOSAR, the automotive embedded software framework
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- [Raspberry Pi Pico Review] Thonny software builds compilation environment + LED flashing
- A fully digital phase-locked loop design under large frequency deviation and low signal-to-noise ratio conditions
- EEWORLD University Hall ---- Learn HLS with me
- [Bluesight AB32VG1 RISC-V board "meets" RTT] Run it first
- Qinheng PD sink protocol chip CH224K test, rant & alternative play
- I always get range check error when I import DDB files with AD09
- Submit your work --- Childish posture reminder
- EEWORLD University Hall----Live Replay: TI takes you to experience the interconnected and efficient smart home solution
- Thank you all for your help. Thank you very much.
- Array sorting problem






 京公网安备 11010802033920号
京公网安备 11010802033920号