Abstract Frequency Modulated Continuous Wave (FMCW) radar has been widely used in automobile anti-collision systems. This paper describes and compares the development of automobile anti-collision systems at home and abroad in recent years. Taking FMCW millimeter wave radar as the front end of the system, the principle, structure, signal preamplification and analog-to-digital conversion of the anti-collision system and other key data acquisition modules are introduced and designed.
Keywords FMCW; millimeter wave radar; vehicle anti-collision system; preamplification
With the rapid increase in the total number of vehicles in China, traffic safety issues have also attracted widespread attention from the government and society. A large number of studies have shown that when an accident occurs, if the vehicle can brake 0.7 s in advance, the collision mortality rate can be reduced by 75%; if it can brake 1.3 s in advance, the collision mortality rate will be reduced by more than 99%. Therefore, the golden time of collision alarm of 1.3 s can effectively reduce the accident rate. The vehicle-mounted FMCW (Frequency Modulation Continuous Wave) radar anti-collision system is an important active safety means to reduce the accident rate.
The research on vehicle-mounted anti-collision radar system began in the 1960s. Since the 1990s, companies such as Mercedes-Benz, Nissan, Toyota and Ford have installed continuous wave radars in small batches. Mercedes-Benz S series, Jaguar XKR series, Audi A8 and other high-end models have been equipped with related systems, but the price is expensive. The development of automobile anti-collision radar in China started late. Although it has attracted the attention of the industry, there has not been a batch of miniaturized finished products that are easy to install on vehicles. Due to its advantages in distance measurement and speed measurement, FMCW radar has become the first choice for active anti-collision systems in automobiles. The automobile anti-collision radar system based on FMCW technology introduced in this article can automatically detect the distance and relative speed between two vehicles, make danger judgments, and remind the driver to make corresponding reactions or associate actions with the brake system to avoid collision between the two vehicles.
1 Selection and principle of anti-collision radar system solutions
1.1 Comparison and selection of automobile anti-collision detection technology
At present, automobile anti-collision detection mainly uses some measurement methods such as infrared, ultrasonic, and radar. Among them, optical technologies such as infrared, laser, and camera are cheap and simple in technology, but the effect of working in all weather is not good; ultrasonic waves are greatly affected by weather conditions, have a short detection distance, and are mostly used for reversing protection; while FMCW millimeter wave radar overcomes the shortcomings of the above detection methods in automobile anti-collision detection, and has stable detection performance and good environmental adaptability. It can not only measure the target distance, but also measure the relative speed and azimuth of the target object, making it possible for the car to drive blindly under adverse weather conditions. In addition, FMCW millimeter wave radar has a simple structure, low transmission power, high resolution and sensitivity, and small antenna component size, and has become the first choice for active anti-collision radar.
1.2 Selection of radar frequency
In principle, there is no special restriction on the frequency of radar waves. At present, according to the decision of the European Commission, from the second half of 2005 to 2013, in all EU countries, automobile anti-collision radar will use the special frequency band of 24 GHz in the K band. Although the wavelength of the 24 GHz radar in the K band is 12 mm, which has reached the range of centimeter waves, it is still close to millimeter waves in terms of characteristics. Therefore, it is also considered as a millimeter wave radar.
1.3 Working Principle of FMCW Radar
The basic principle of FMCW radar is that the transmitted wave is a high-frequency continuous wave, and its frequency changes with time according to the triangular wave law. The echo frequency received by the radar has the same change law as the transmitted frequency, both of which are triangular wave laws, but there is a time difference. This tiny time difference can be used to calculate the target distance. The relative relationship between the transmitting frequency and the receiving frequency can not only measure the target distance, but also measure the target radial velocity v. Figure 1 is a basic structural diagram of FMCW radar.
 [page]
[page]
The basic working principle of FMCW radar is shown in Figure 2.
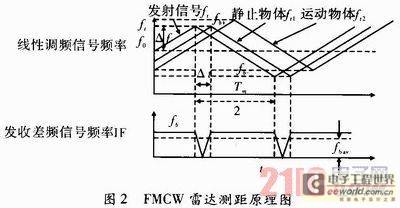
Among them, the transmission signal frequency ft changes according to the law of periodic triangular waves, and its frequency modulation bandwidth is △f. The average frequency of ft is f0. Usually, f0 varies from hundreds to thousands of MHz, and the variation period is Tm. fr1 is the echo frequency reflected from the stationary target. It has the same variation law as the transmission frequency, but lags behind tr=2R/c in time. The frequency difference between the transmission and reception frequencies is the intermediate frequency signal frequency IF output by the mixer, and the average value of the difference frequency is represented by Fbav.
2 Structure of the automobile anti-collision radar system
The main work of the system is to measure the relative distance and relative speed between the vehicle and the target in front. The radar detects the target in front. If the target is found, the target distance, speed and direction are measured, and at the same time, it is determined whether the target and the vehicle are in the same lane. If so, the distance and speed of the target are compared with the warning conditions set by the radar. When the warning conditions are met, the radar will give the driver an acoustic and visual warning or link with the brake system. The structural block diagram is shown in Figure 3.
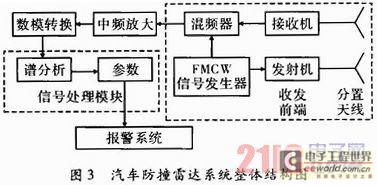
FMCW radar antennas are divided into common antennas for transmission and reception and separate antennas. The selected radar uses separate antennas for transmission and reception, that is, two antennas are used for transmitting and receiving signals respectively. Microstrip antennas have the advantages of low cost, reliable performance, small space occupation, and good repeatability. They are suitable for use in automobiles. The selected radar uses planar microstrip antennas.
The transceiver front end is the core part of the radar system, mainly including voltage-controlled oscillator VCO, mixer, directional coupler, etc.; among them, VCO is the core of the transceiver front end, which is used to generate frequency-modulated waves. The directional coupler couples part of the VCO output power to the input end of the mixer as the intrinsic signal of the mixer. The function of the mixer is to complete the difference frequency of the echo and the local oscillator signal, thereby outputting the intermediate frequency signal, and then using a bandpass filter to filter out some clutter in the mixer output. The intermediate frequency amplifier
circuit amplifies and matches the difference frequency signal output by the mixer, that is, the intermediate frequency signal, to eliminate the interference signal and achieve amplitude uniformity. The performance of the intermediate frequency amplifier circuit directly affects the detection of the target echo signal.
The signal processing module processes the signal amplified by the intermediate frequency, extracts the frequency of the signal, and thus calculates the distance and speed of the target. Generally, the digital signal processing task is completed by DSP. The T16000 series DSP can be used to complete a series of processing related to numerical calculation after A/D conversion, including filtering, data preprocessing, FFT, spectrum peak smoothing, target search, target tracking and other tasks. [page]
3 Data Acquisition System Design
3.1 VCO Modulation Voltage The voltage
controlled oscillator VCO needs a modulation voltage to change the frequency of the transmitted signal. As mentioned above, the modulation signal waveform of the FMCW radar is a triangular wave mode, which requires a triangular wave modulation voltage to make the VCO work. However, it can be realized by using a single chip microcomputer using PWM, or directly using a triangular wave generating circuit. However, no matter which method is used, in the actual application process, the linearity is always not ideal. Therefore, the amplitude of the triangular wave voltage is appropriately enlarged, and then a section with better linearity is taken to control the VCO operation. The triangular
wave generating circuit is shown in Figure 4.
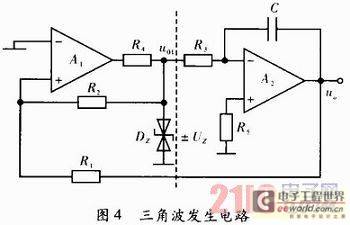
The oscillation frequency is
![]()
The oscillation frequency can be changed by adjusting the resistance values of R1, R2, and R3 and the capacity of C in the circuit. The amplitude of the triangular wave can be changed by adjusting the resistance values of R1 and R2.
3.2 Filter amplifier circuit
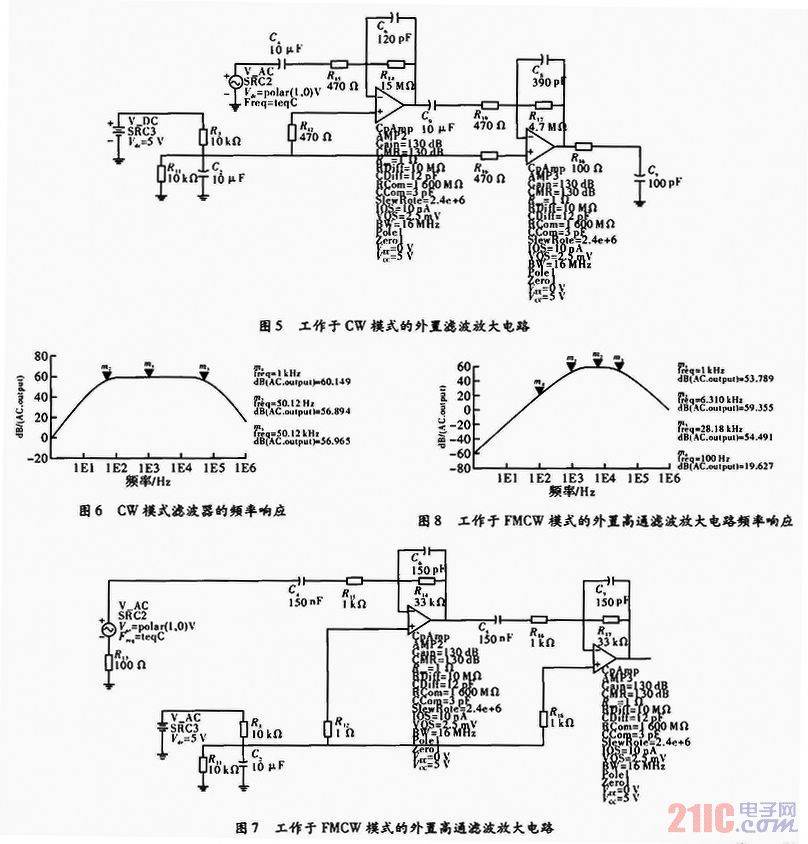
The intermediate frequency signal output by the radar sensor when working needs to be filtered, amplified and processed by DSP before it can be analyzed and the required target information can be obtained. Especially when the radar works in FMCW mode, the output signal must be filtered to remove the modulation signal before amplification, otherwise the modulation signal will be over-amplified, resulting in signal saturation and distortion. When the radar works in FMCW mode for ranging function, the purpose of the external filter amplifier circuit is mainly to remove the modulation signal and further amplify the output signal; when the radar works in CW mode for speed measurement function, the purpose of the external filter amplifier circuit is mainly to filter out interference and noise, and also to further amplify the output signal. Figure 5 shows an external filter amplifier circuit working in CW mode, with a gain of 60 dB and a bandwidth of 30 Hz to 50 kHz. Figure 6 shows the frequency response curve of the filter. Figure 7 is a high-pass filter circuit operating in FMCW mode, with a gain of 60dB and a frequency of 1kHz. Figure 8 is its corresponding frequency response curve. [page]
3.3 Analog-to-digital conversion
After the sensor output signal is amplified by high-pass filtering, it is first converted into a digital signal by D/A sampling and then handed over to the DSP module for processing. Because the sampling rate is high, frequent interruptions to the DSP will cause a lot of waste of processor processing time, so the A/D sampled data is first sent to the First In First Out (FIFO) memory and then centrally handed over to the DSP. Moreover, the read enable and write enable of the FIFO can be used to control the storage and reading of the ADC sampled data. After FFT and corresponding Chirp-Z transform and other digital processing operations, the required information can be finally analyzed.
4 Conclusion
The research and development and promotion of automotive active safety devices have been a hot topic of research and promotion by global vehicle manufacturers and auto parts manufacturers in recent years. As the main on-board active safety equipment, the FMVCW microstrip millimeter wave radar system is triggering a wave of research, technology improvement and commercialization of active collision avoidance systems. The architecture of the micro FMCW radar system and the design of the key circuit of the front-end data acquisition module are introduced in this article to provide a reference for workers in related fields.
Previous article:Design of USB2.0 Interface for Digital Synthesized Frequency Sweeper
Next article:Focus on mobile display technology and analyze future development trends
 A black-box physical layer attack framework for millimeter-wave automotive FMCW radar
A black-box physical layer attack framework for millimeter-wave automotive FMCW radar Automatic parking system design
Automatic parking system design
- Huawei's Strategic Department Director Gai Gang: The cumulative installed base of open source Euler operating system exceeds 10 million sets
- Analysis of the application of several common contact parts in high-voltage connectors of new energy vehicles
- Wiring harness durability test and contact voltage drop test method
- Sn-doped CuO nanostructure-based ethanol gas sensor for real-time drunk driving detection in vehicles
- Design considerations for automotive battery wiring harness
- Do you know all the various motors commonly used in automotive electronics?
- What are the functions of the Internet of Vehicles? What are the uses and benefits of the Internet of Vehicles?
- Power Inverter - A critical safety system for electric vehicles
- Analysis of the information security mechanism of AUTOSAR, the automotive embedded software framework
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- Rambus Launches Industry's First HBM 4 Controller IP: What Are the Technical Details Behind It?
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- 30V8A stepper motor driver, step angle 1.8 degrees, required accuracy 0.1 degrees, should I choose chip or H bridge
- Circuit diagram of leakage alarm automatic control socket
- How to detect mosquitoes using ultrasonic sensor circuit
- 2021 National College Student Electronics Competition Released
- Share the application manuals, library functions, routines and selection tables of the full range of MM32 MCU products of Lingdong Microelectronics
- TEAMWORK
- 【Construction Monitoring and Security System】Work Submission Post
- Live FAQ|Typical applications in the era of the Internet of Things
- EEWORLD University Hall----Signal Integrity and High-Speed Digital Circuit Design
- Competition Schedule [Updated]






 京公网安备 11010802033920号
京公网安备 11010802033920号